一种双馈风电机组频率控制器
2016-07-16田新首迟永宁汤海雁李庚银
田新首, 迟永宁,汤海雁,李庚银
(1. 华北电力大学 电气与电子工程学院,北京102206; 2. 中国电力科学研究院,北京100192)
一种双馈风电机组频率控制器
田新首1,2, 迟永宁2,汤海雁2,李庚银1
(1. 华北电力大学 电气与电子工程学院,北京102206; 2. 中国电力科学研究院,北京100192)
摘要:双馈风电机组的解耦控制使输出的有功功率无法响应电网频率的变化,其最大功率跟踪控制也无法为电网提供备用功率,使风电机组难以为系统调频提供持续的有功功率支撑。为此,提出一种基于运行工况差异性的减载运行方案,高出力时通过变桨控制、低出力时通过变速和变桨协调控制来实现有功功率备用。引入机组参与因子的概念,并应用于频率控制器的设计中,该控制器以易于准确测量的机组电磁功率、转子转速、桨距角和系统频率为观测对象,实时参与系统的频率控制过程。理论与仿真分析表明,该频率控制器能够保证机组全工况参与调频过程,有效提高了风电并网系统的频率稳定性。
关键词:双馈风电机组;虚拟备用;最优动能;参与因子;频率控制器
随着风电机组单机容量及风电场规模的不断提高,风力发电在电网中所占比重逐渐增高,风电场随机功率对接入电网的冲击给电网的安全运行带来许多不稳定因素[1-2]。双馈风电机组作为目前商业化的主力机型,采用了变频器控制而使风机有功出力与系统频率解耦,使其失去了对电网频率的快速有效响应。为了获得最大的风能利用率,双馈风电机组通常运行在最大功率跟踪控制状态,无法为电力系统提供有功功率备用,更增加了系统的调频压力。
围绕着大规模风电并网的频率稳定性问题,学术界开展了大量的研究工作。目前,针对风电场并网对电网频率动态特性的影响及频率控制的研究主要集中在2个方面:一是利用风电机组自身的旋转动能[3-6]参与系统调频,此方法的缺点是低风速时转子转速较低,调频能力有限,且频率控制过程中转速下降造成风功率捕获能力下降,会引起二次频率冲击;二是采用有功功率备用技术[7]。对于双馈风电机组采用功率备用方法参与系统调频,目前主要通过超速运行控制、变桨控制来实现。文献[8-13]分析了双馈风电机组参与电网一次调频的原理,给出了基于最优转速的机组减载运行方案,但在机组高出力情况下未考虑机组超发功率的能力,且并未给出机组运行状态对机组参与频率控制的影响。文献[14-20]基于转子转速和风速的特点,划分不同的风速区间,在低风速区采用超速法,高风速区采用变桨法,但一次调频控制器的设计以风速信号作为控制模式切换的依据,由于机组叶片及尾流效应的影响,风速在实际运行中难以准确测量,影响机组频率控制的准确度。另外,目前设计的减载运行方案普遍缺乏对超速法与变桨法切换过程的稳定性研究,影响机组频率控制稳定性。
本文在前人研究的基础上,以双馈风电机组为研究对象,结合文献[6]对双馈风电机组不同运行工况下的调频能力进行研究,提出一种实用的频率控制器,以易于准确测量的机组电磁功率、转子转速、桨距角和系统频率为观测对象。桨距角控制在全功率输出下参与机组的减载运行和系统的频率控制,实现机组全工况的稳定运行。风电机组通过在高出力下优先虚拟备用,中出力与低出力下基于机组最优动能实现有功备用,引入机组参与系统频率控制的参与因子和系统频率变化信号实现机组的频率控制。仿真结果表明,当系统频率变化时,该双馈风电机组频率控制器能够提供持续的有功功率支撑,提高了电力系统的频率稳定性。
1双馈风电机组减载运行方案
1.1减载运行算法
双馈风电机组正常运行在最大功率跟踪状态,捕获的机械功率
(1)
式中:ρ为空气密度;A为叶片扫过的面积;veq为风速;Cp(β,λ)为风机的风能转换效率,是桨距角β与叶尖速比λ的函数。
给定的桨距角β与叶尖速比λ,则风能转换效率[6]
(2)
其中:
(3)
(4)
式中:R为风力机叶片半径,ω为风力机转子转速。

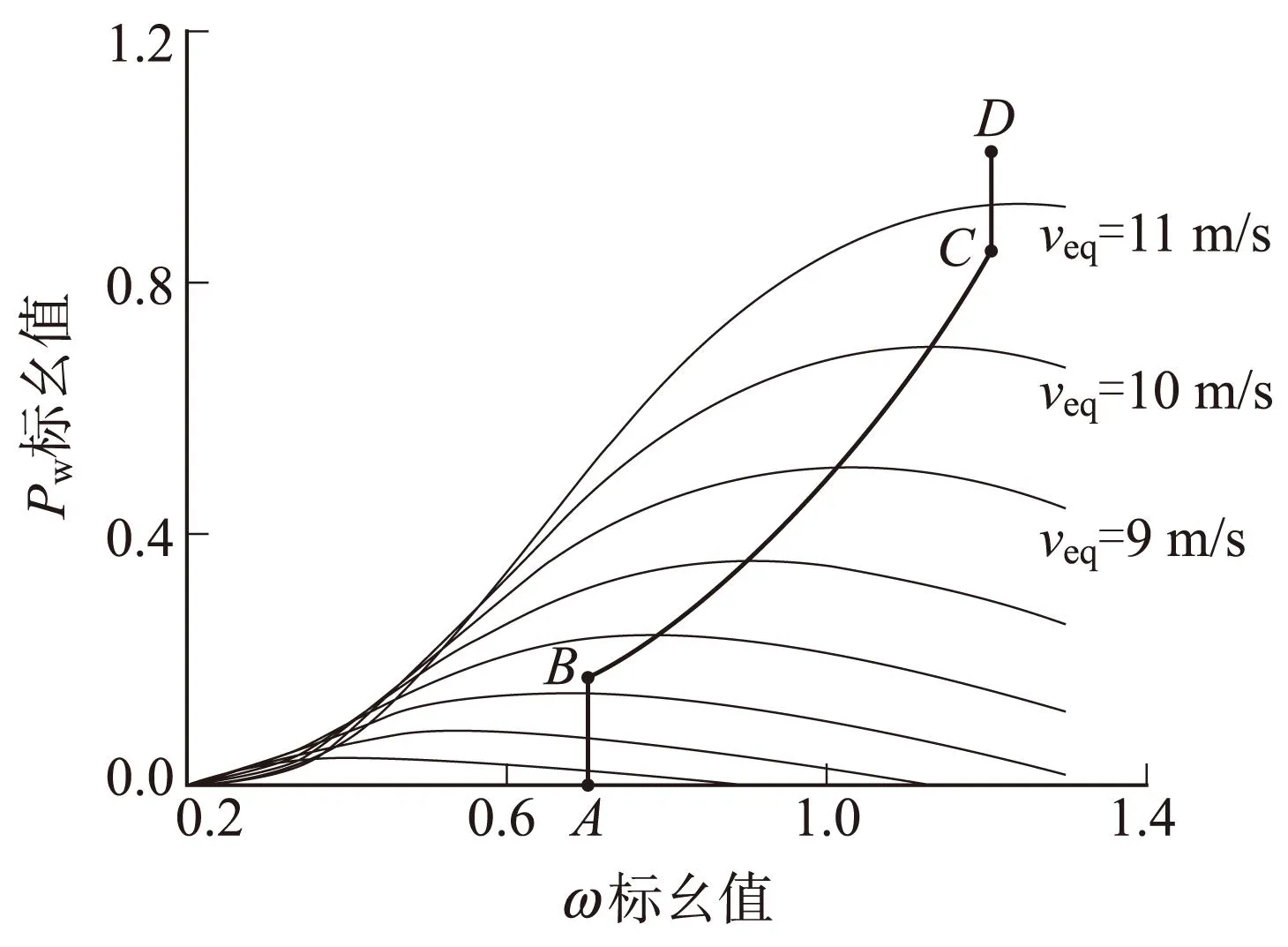
图1 双馈风电机组功率与转速的关系
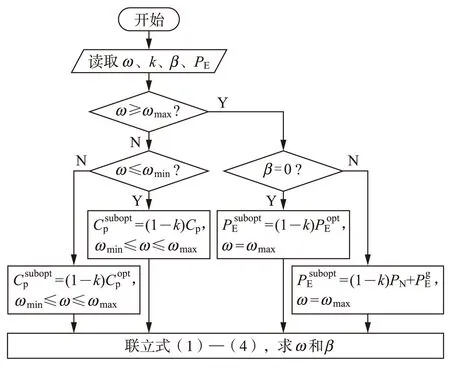
为使风电机组在系统功率出现缺额、系统频率下降时能够提供持续的有功功率支撑,通过设计减载方案使双馈风电机组正常运行时留取部分备用功率。在满足系统调频要求的基础上,需要考虑发电机、变流器的容量限制和轴系疲劳累积等因素的制约。本文忽略调频过程因转矩变化对机组轴系等的影响,假设机组满足最大出力的动态要求。基于双馈风电机组在不同出力情况下的运行特性,设计了一种减载运行方案,如图2所示。
k—机组备用容量百分比,取值范围0~100%;PE—机组输出电磁功率;—次最优风能转换效率;—高出力时最优功率;—次最优功率;PN—额定功率,标幺值取1;—高出力、桨距角不为零时可实现的虚拟备用容量。图2 双馈风电机组减载运行实施方案
1.2减载运行曲线
由双馈风电机组减载运行实施方案可得双馈风电机组减载运行曲线,并与最大功率跟踪控制运行曲线和优先采用超速法留取备用容量运行曲线作比较,如图3所示。
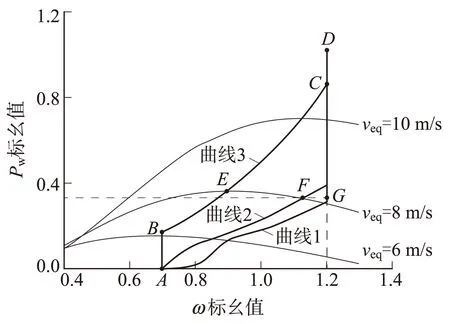
曲线1—本文算法下的减载运行曲线,曲线2—采用优先超速法的减载运行曲线,曲线3—最大功率跟踪控制运行曲线。图3 双馈风电机组运行曲线比较
由图3可知:在相同风速下,采用功率备用方法时风电机组的转子转速升高,当风电机组参与系统调频时可以提供持续的有功功率支撑。在相同的功率备用要求下,本文算法下的减载运行方案动能增加量更大,有利于风电机组参与系统调频。假设风速veq=8m/s,采用最大功率跟踪控制时机组运行于E点,采用优先超速法时机组运行于F点,采用本文方法留备用时机组运行于G点。3种不同控制方法可释放的动能分别为:
(5)
式中:ΔEE、ΔEF、ΔEG分别为运行于E点、F点、G点的可释放动能;JD为机组总转动惯量;ωE、ωF、ωG分别为运行于E点、F点、G点的转子转速,取标幺值。
由式(5)可以看出,G点可释放的动能最大,对风电机组参与系统调频最有利。
1.3减载运行稳定性
由双馈风电机组减载运行实施方案和运行曲线,得相应的风能转换效率Cp的变化过程,并与最大功率跟踪控制、优先超速法的风能转换效率变化过程作比较,如图4所示。
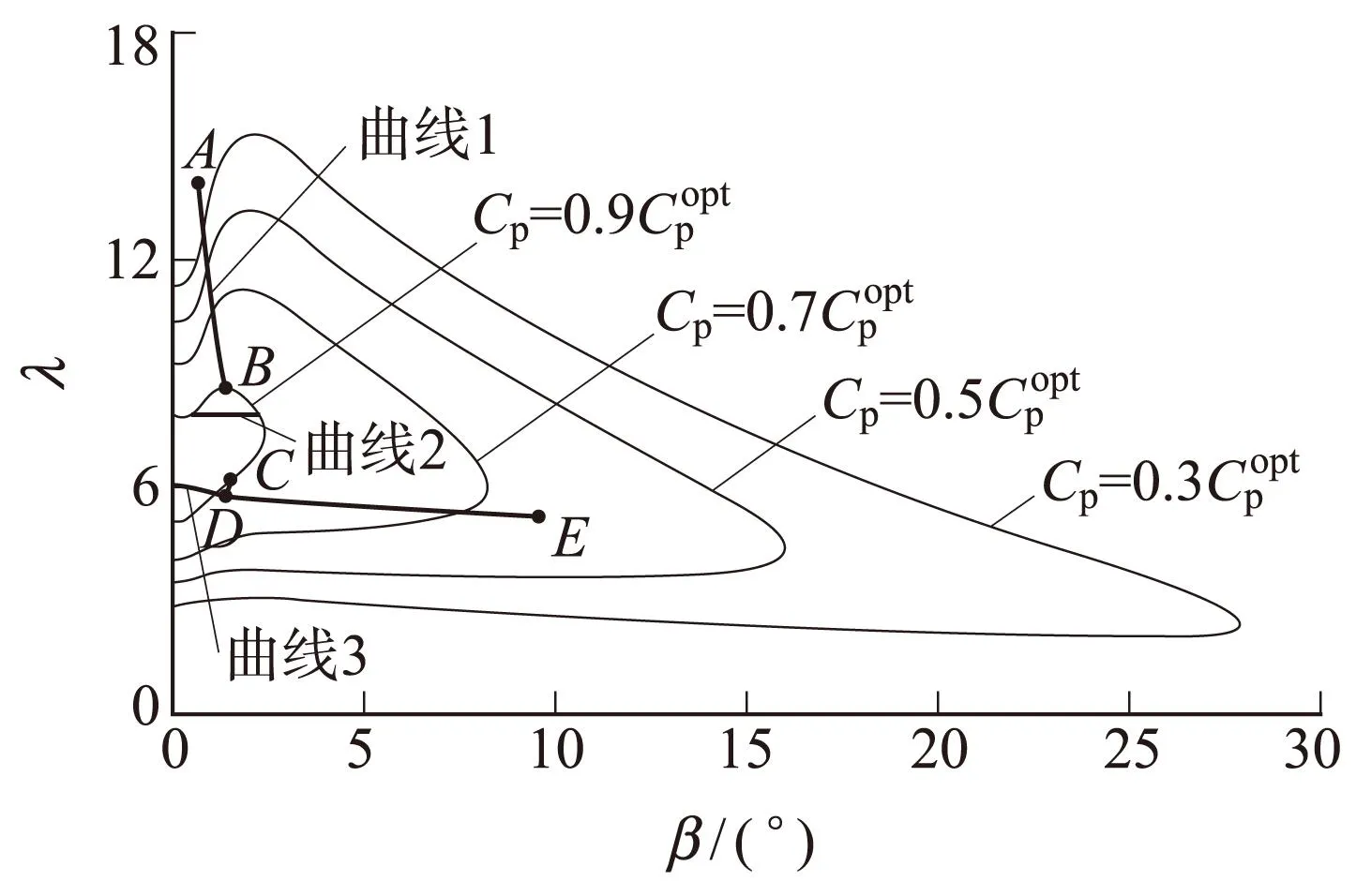
曲线1—本文算法留备用方法,曲线2—低风速下采用优先超速法留备用方法,曲线3—无备用运行方法。图4 Cp与β、λ的关系
在图4中,对于曲线1(ABCDE),A点为切入风速,随风速的增加叶尖速比λ减小,桨距角β先增加后减小,风速变化过程中桨距角β与叶尖速比λ保持连续变化,且叶尖速比λ最大,保证了风速变化过程中转速控制与桨距角控制的稳定;对于曲线2,由于采用优先调速法,只有在调速法无法实现备用容量时才投入变桨控制,使得风速变化时仅叶尖速比λ是连续变化的,控制切入点处桨距角有突变,影响机组的稳定性;对于曲线3,同样可保证机组稳定运行,但其以最大风能转换效率为控制目标,正常运行时无备用功率。
2双馈风电机组实用频率控制器设计
在当前运行条件下,双馈风电机组参与系统调频的能力可通过参与因子来衡量[6]。参与因子的表达式为
式中:μ1为反映机组功率备用状态的一次调频参与因子,μ2为反映机组动能的惯量参与因子。
结合双馈风电机组的控制特性和减载运行方案,引入机组参与系统频率控制参与因子μ,设计双馈风电机组实用频率控制器,输入量采用工程实际中易于测量的电磁功率PE、风力机转子转速ω和电网频率f,输出量为下达给被控对象转子侧控制器的功率参考值Pref和桨距角参考值βref。设计框图如图5所示。
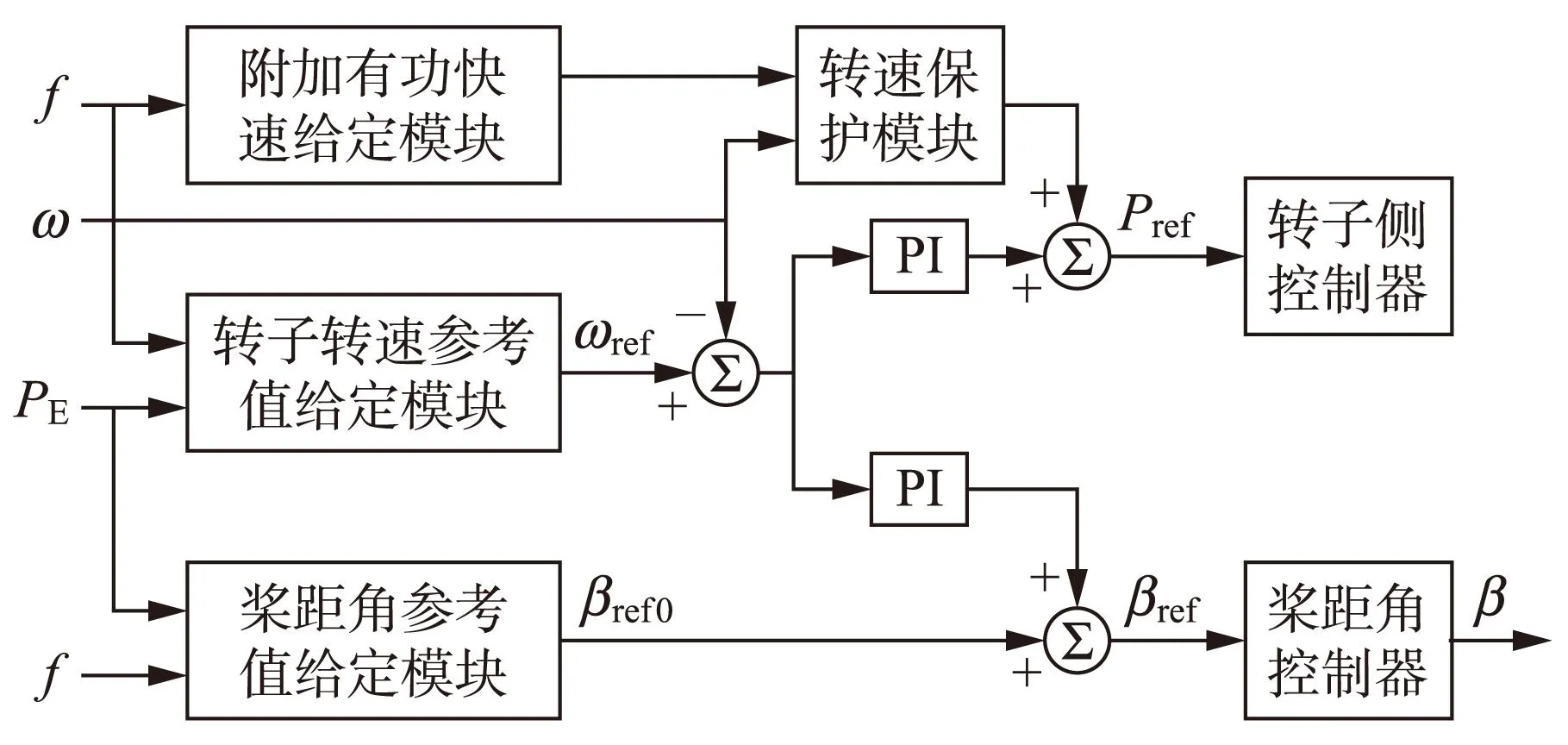
PI—比例积分,proportional plus integral的缩写;ωref—转子转速实际给定值;βref0—桨距角的实际给定值。图5 双馈风电机组频率控制器
图5的频率控制器由4个主要控制模块组成:转子转速参考值给定模块(模块1)、桨距角参考值给定模块(模块2)、附加有功快速给定模块(模块3)、转速保护模块(模块4)。
2.1减载运行
模块1与模块2采用减载方案实现双馈风电机组的减载运行。当备用容量百分比k给定后,由双馈风电机组减载运行实施方案得到双馈风电机组的减载运行曲线。
模块1通过计算得到风电机组有功功率与转子转速的函数关系,高出力时给定转子转速为最大值,中出力和低出力时按有功功率与转子转速的函数关系控制转子转速,实现风电机组的减载运行。模块2通过计算得到风电机组有功功率与桨距角的函数关系,在高出力初始桨距角不为零时,通过桨距角进行控制并考虑风电机组自身的功率穿透能力,利用虚拟备用实现风电机组的减载运行;在高出力初始桨距角为零时,通过桨距角控制实现风电机组的减载运行;中出力和低出力时,通过桨距角控制配合模块1的转子转速控制实现风电机组的减载运行。模块1与模块2协调控制转子转速和桨距角,确定风电机组的减载运行点。
2.2频率控制
2.2.1模块1
当系统频率波动时,在高出力下,保持转子转速给定为最大值不变;在中出力与低出力下,根据系统频率变化与机组一次调频参与因子,采用变参数更改运行曲线的方法实现转子转速的控制。其表达式为:
式中:ω0为转子转速的初始值,ω1为转子转速的目标值,b为转子转速给定变化率,K1为比例因数,K2为积分因数,t为时间。
2.2.2模块2
当系统频率波动时,在高出力下,根据系统频率变化与机组一次调频参与因子,采用变参数更改功率与桨距角对应关系的方法对桨距角进行控制,并利用虚拟备用的方法实现机组的频率控制;在中出力与低出力下,配合转子转速控制,根据系统频率变化与机组一次调频参与因子,采用变参数更改功率与桨距角对应关系的方法对桨距角进行控制,实现机组的频率控制。其表达式为:
式中:β0为桨距角初始值,β1为桨距角目标值,c为桨距角给定变化率。转子转速与桨距角初始值为本文减载方案对应的给定值,目标值为最大功率跟踪控制对应的给定值。
2.2.3模块3
类似于虚拟惯量控制,并引入惯量参与因子的影响,功能是利用存储在旋转质块中的动能快速参与系统调频。其表达式为
式中:ΔPf为附加有功功率给定值,K3为微分因数。2.2.4模块4
由于调频过程往往伴随转子转速的下降,控制过程中需考虑风机的转子转速约束,在频率控制器中加入模块4,在转子转速过低时闭锁模块3,以免风机转速越限。
3算例分析
为验证本文所提频率控制策略的有效性,利用DIgSILENT/PowerFactory仿真软件建立“3机10节点”算例系统,如图6所示。该系统的负荷包括320 MW不变负荷和30 MW冲击负荷,电源包括一个由45台2 MW双馈风电机组组成的风电场、火电机组G1和G2,各电厂的同步机组模型包括原动机和调速系统模型,机组及电力系统的模型和参数均采用典型值,风电渗透率约25%。
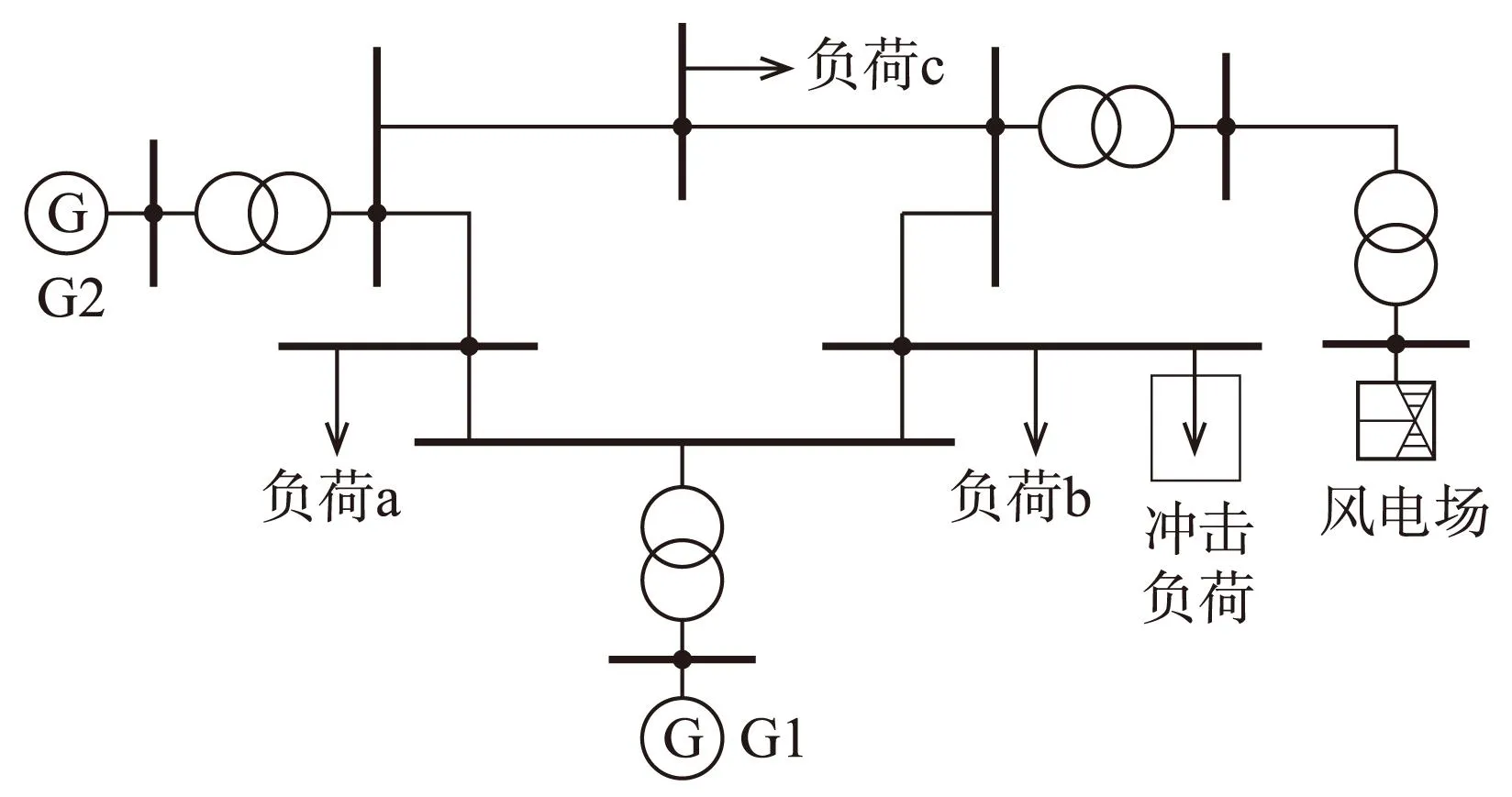
图6 仿真系统
分别在不同出力模式下采用不同的风电机组控制方案进行仿真分析,出力模式分别为高出力、中出力和低出力,控制方案分别为风电机组不参与系统调频、风电机组采用本文所提频率控制技术参与系统调频。备用容量百分比k取0.1,系统元件参数相同,仿真事件为5 s时30 MW的冲击负荷突然投入运行,导致系统频率降低。
3.1高出力时频率响应特性
图7为风电机组高出力工况下的频率响应特性。
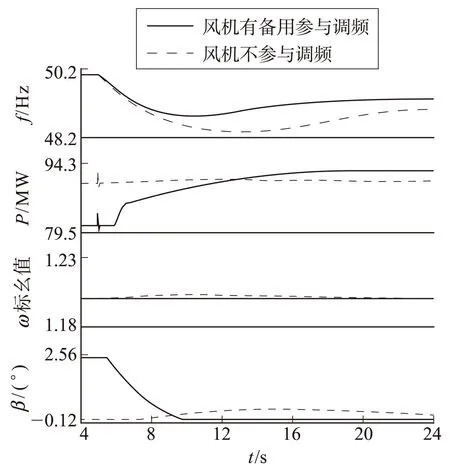
图7 高出力时调频过程
由图7可以看出:高出力工况下,双馈风电机组不参与系统调频时,系统频率最低值为48.4 Hz,机组有功出力基本不变;双馈风电机组采用本文设计的频率控制器时,系统频率最低值为48.9 Hz,机组有功出力增加9 MW。因此,在高出力工况下,当系统频率扰动时,采用本文设计的频率控制器可使系统频率下降减少0.5 Hz。
3.2中出力时频率响应特性
图8为风电机组中出力工况下的频率响应特性。
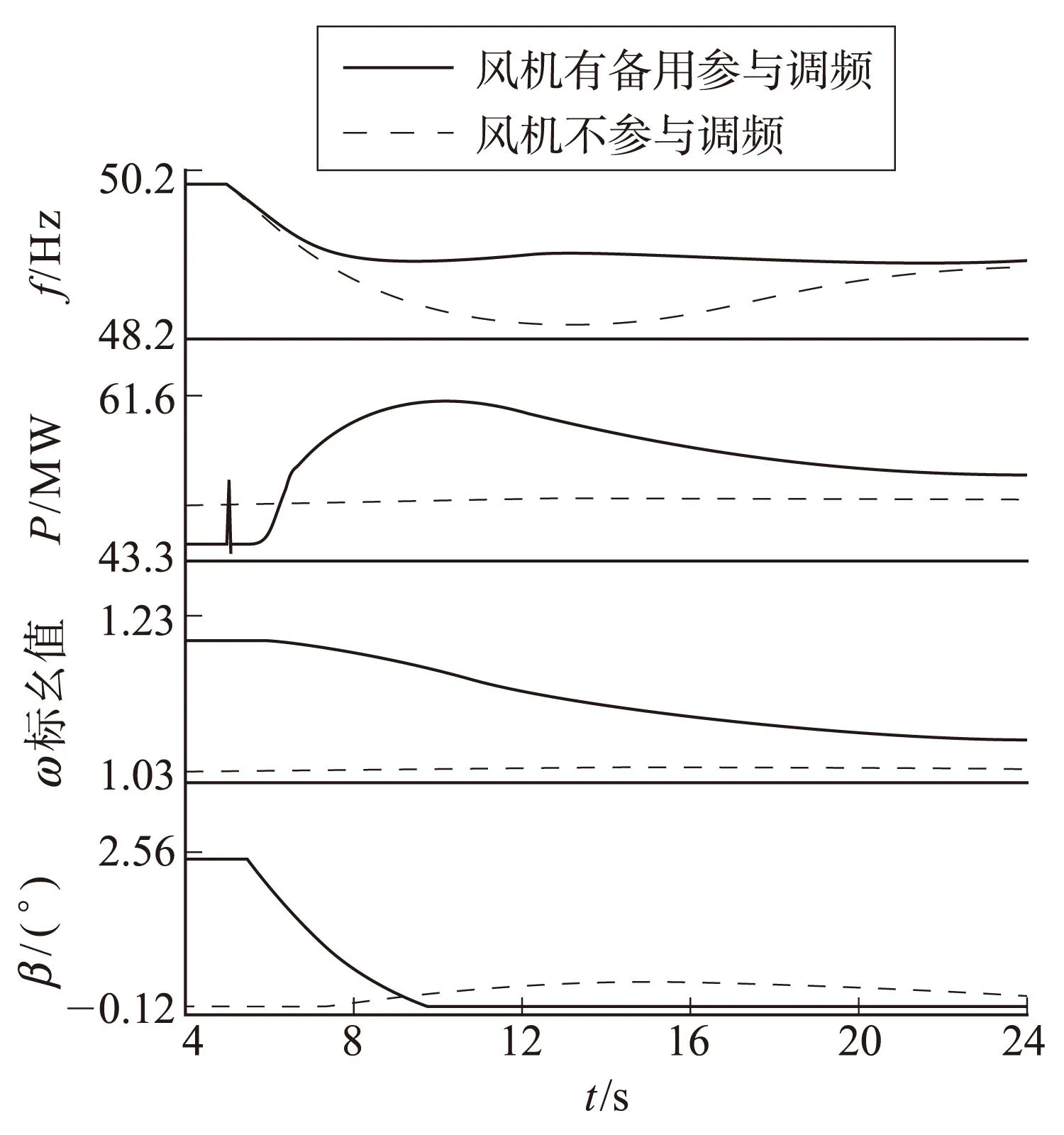
图8 中出力时调频过程
由图8可以看出:中出力工况下,双馈风电机组采用本文设计频率控制器时,系统频率最低值为49.2 Hz,机组有功出力增加5 MW;双馈风电机组不参与系统调频时,系统频率最低值为48.4 Hz,机组有功出力基本不变。因此,在机组中出力工况下,当系统频率扰动时,采用本文设计的频率控制器可使系统频率下降减少0.8 Hz。
3.3低出力时频率响应特性
图9为风电机组低出力工况下的频率响应特性。
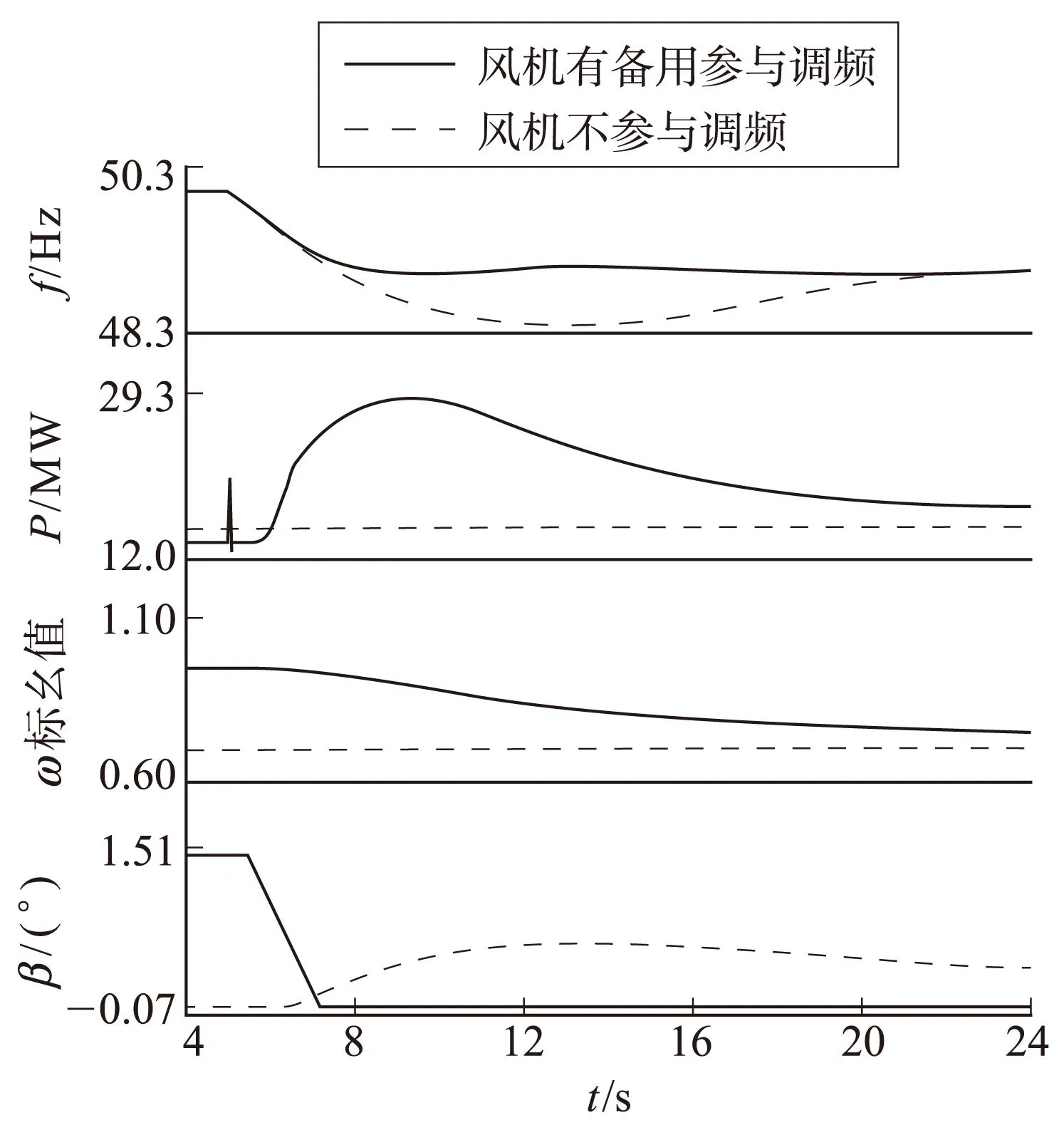
图9 低出力时调频过程
由图9可以看出:在低出力工况下,双馈风电机组采用本文设计频率控制器时,系统频率最低值为49.1 Hz,机组有功出力增加3 MW;双馈风电机组不参与系统调频时,系统频率最低值为48.4 Hz,机组有功出力基本不变。因此,在机组低出力工况下,系统频率扰动时采用本文设计的频率控制器可使系统频率下降减少0.7 Hz。
3.4结果分析
由以上仿真对比分析可知,双馈风电机组无附加频率控制时,电网频率扰动下系统频率变化幅度较大;采用本文所提频率控制器,在不同出力条件下均可对电网频率扰动提供差异化的持续有功功率支撑,对电力系统频率稳定性有显著提高。
4结论
通过理论研究和仿真分析,对本文所提的双馈风电机组频率控制方案得出如下结论:
a)在机组高出力时,通过变桨控制来实现功率备用,机组中出力和低出力时通过变速与变桨协调控制来实现功率备用,相同备用功率要求下可获得更大的动能。
b)机组全风速区参与调频,有效提高了风电并网系统的频率稳定性。
c)该控制策略同时协调虚拟惯量控制和一次调频控制,兼顾机组参与频率控制的快速性和有功支撑的持续性。以机组出力、转子转速、桨距角和电网频率为输入量,在工程中均能够准确测量,易于工程化应用。
参考文献:
[1] 李军军, 吴政球. 风电参与一次调频的小扰动稳定性分析[J]. 中国电机工程学报, 2011, 31(13): 1-9.
LI Junjun, WU Zhengqiu. Small Signal Stability Analysis of Wind Power Generation Participating in Primary Frequency Regulation[J]. Proceeding of the CSEE, 2011, 31(13): 1-9.
[2] 丁宇, 陈永华, 李雪明, 等. 大规模风电并网控制技术现状与展望[J]. 广东电力, 2011, 24(5): 24-28,38.
DING Yu, CHEN Yonghua, LI Xueming, et al. Status Quo and Prospect on Control Technique for Large-scale Synchronization of Wind Power[J]. Guangdong Electric Power, 2011, 24(5): 24-28,38.
[3] 李和明, 张祥宇, 王毅,等. 基于功率跟踪优化的双馈风力发电机组虚拟惯性控制技术[J]. 中国电机工程学报, 2012, 32(7): 32-39.
LI Heming, ZHANG Xiangyu, WANG Yi, et al. Virtual Inertia Control of DFIG-based Wind Turbines Based on the Optimal Power Tracking[J]. Proceedings of the CSEE, 2012, 32(7): 32-39.
[4] 彭喜云, 刘瑞叶. 变速恒频双馈风力发电机辅助系统调频的研究[J]. 电力系统保护与控制, 2011, 39(11): 56-61.
PENG Xiyun, LIU Ruiye. Research on the Frequency Regulation of Adding System of VSCF Double-fed Wind Generator[J]. Power System Protection and Control, 2011, 39(11): 56-61.
[5] ULLAH N R, THIRINGER T,KARLSSON D. Temporary Primary Frequency Control Support by Variable Speed Wind Turbines-potential and Applications[J]. IEEE Transactions on Power Systems, 2008, 23(2): 601-612.
[6] 田新首, 王伟胜, 迟永宁, 等. 基于双馈风电机组有效储能的变参数虚拟惯量控制[J]. 电力系统自动化, 2015, 39(5): 20-26.
TIAN Xinshou, WANG Weisheng, CHI Yongning, et al. Variable Parameter Virtual Inertia Control Based on Effective Energy of DFIG-based Wind Turbines[J]. Automation of Electric Power Systems, 2015, 39(5): 20-26.
[7] DE ALMEIDA R G, PECAS J A. Participation of Doubly Fed Induction Wind Generators in System Frequency Regulation[J]. IEEE Trans. on Power Systems, 2007, 22(3): 944-950.
[8] TENINGE A, JECU C, ROYE D, et al. Contribution to Frequency Control Through Wind Turbine Inertial Energy Storage[J]. IET Renewable Power Generation, 2009,3(3): 358-370.
[9] JACOB A, ANDREW B, JASON L, et al. A Tutorial of Wind Turbine Control for Supporting Grid Frequency Through Active Power Control[C]//2012 American Control Conference, June 27-29, 2012,Fairmont Queen Elizabeth,montreal,Canada. Piscataway:IEEE,2012: 3120-3131.
[10] ZERTEK A, VERBIC G, PANTOS M. Optimised Control Approach for Frequency Control Contribution of Variable Speed Wind Turbines[J]. IET Renewable Power Generation, 2012, 6(1): 17-23.
[11] 李灿, 李超, 康正, 等. 含变速恒频风电场的电网频率协调控制策略[J]. 电网与清洁能源, 2014, 30(7): 62-67.
LI Can, LI Chao, KANG Zheng, et al. Frequency Coordinated Control Strategy of Variable-Speed Constant-Frequency Wind Farms in Power Grids[J]. Power System and Clean Energy, 2014, 30(7): 62-67.
[12] 丁磊, 尹善耀, 王同晓, 等. 结合超速备用和模拟惯性的双馈风机频率控制策[J]. 电网技术, 2015, 39(9): 2385-2391.
DING Lei, YIN Shanyao, WANG Tongxiao, et al. Integrated Frequency Control Strategy of DFIGs Based on Virtual Inertia and Over-Speed Control[J]. Power System Technology, 2015, 39(9): 2385-2391.
[13] OWAID G I A, ELZAWAWI A, ELGAMMAL M. Improved Inertia and Frequency Support from Grid-connected DFIG Wind Farms[J]. IEEE Transactions on Power Systems, 2011,26(2):1-9.
[14] 张昭遂, 孙元章, 李国杰, 等. 超速与变桨协调的双馈风电机组频率控制[J]. 电力系统自动化, 2011, 35(17): 20-25.
ZHANG Zhaosui, SUN Yuanzhang, LI Guojie, et al. Frequency Regulation by Doubly Fed Induction Generator Wind Turbines Based on Coordinated over Speed Control and Pitch Control[J]. Automation of Electric Power Systems, 2011, 35(17): 20-25.
[15] 曹张洁. 双馈感应风电机组参与系统一次调频的控制策略研究[D]. 西安:西安交通大学, 2012.
[16] MA H T, CHOWDHURY B H. Working Towards Frequency Regulation with Wind Plants: Combined Control Approaches[J]. IET Renewable Power Generation, 2010, 4(4): 308-316.
[17] 胡婷. 大规模风电并网运行频率稳定与控制策略研[D]. 北京:华北电力大学, 2014.
[18] CHANG-CHIEN L R, LIN W T, YIN Y C. Enhancing Frequency Response Control by Dfigs in the High Wind Penetrated Power Systems[J]. IEEE Transactions on Power Systems, 2011, 26(2): 710-7l8.
[19] CHANG-CHIEN L R, YIN Y C. Strategies for Operating Wind Power in a Similar Manner of Conventional Power Plant[J]. IEEE Transactions on Energy Conversion, 2009, 24(4): 926-934.
[20] 吴子双, 于继来, 彭喜云. 高风速段次优功率追踪方式的风电调频方法[J]. 电工技术学报, 2013, 28(5): 112-119.
WU Zishuang, YU Jilai, PENG Xiyun. DFIG’s Frequency Regulation Method only for High Wind Speed with Suboptimal Power Tracking[J]. Transactions of China Electrotechnical Society, 2013, 28(5): 112-119.
A Kind of Frequency Controller for Doubly-fed Induction Generators
TIAN Xinshou1,2, CHI Yongning2, TANG Haiyan2, LI Gengyin1
(1. School of Electrical and Electronic Engineering, North China Electric Power University, Beijing 102206, China; 2.China Electric Power Research Institute, Beijing 100192, China)
Abstract:Decoupling control of double-fed induction generators (DFIG) may cause output active power being unable to respond to changes of power grid frequency and its maximum power point tracking (MPPT) control can not provide backup power for the power grid, which may make generators hard to provide continuous active power support for system frequency regulating. Therefore, this paper presents a kind of deloading running scheme based on diversities of different running conditions which is able to realize active power backup by adopting pitch control at the time of high output while variable speed control and pitch control at the time of low output. Concept of participation factor is introduced and applied in design on frequency controller. This controller takes electromagnetic power of the unit, rotor speed, pitch angle and system frequency which can be correctly measured as observation objects for participating in real-time frequency control. Theoretical and simulated analysis indicates that this frequency controller can ensure the unit participate in frequency regulation under all operating conditions and effectively improve frequency stability of the wind power grid-connected system.
Key words:doubly-fed induction generator (DFIG); virtual reserve; optimal kinetic energy; participation factor; frequency controller
收稿日期:2016-01-21修回日期:2016-04-08
基金项目:国家电网公司基础性前瞻性科技项目(NYB17201400158)
doi:10.3969/j.issn.1007-290X.2016.06.008
中图分类号:TM315
文献标志码:A
文章编号:1007-290X(2016)06-0043-07
作者简介:
田新首(1985),男,河南濮阳人。在读博士研究生,主要研究方向为新能源发电与并网稳定性。
迟永宁(1973),男,山东淄博人。高级工程师,工学博士,主要研究方向为风电并网、电力系统稳定与控制。
汤海雁(1981),男,安徽巢湖人。高级工程师,工学博士,主要研究方向为新能源发电与并网稳定性。
(编辑李丽娟)
