筒体内壁马鞍焊接机器人焊接系统的设计开发
2016-07-15陈亚维
陈亚维,张 巍
(中原工学院机电学院,河南 郑州450007)
筒体内壁马鞍焊接机器人焊接系统的设计开发
陈亚维,张 巍
(中原工学院机电学院,河南 郑州450007)
摘要:针对筒体内壁马鞍焊接设备自动化程度不高问题,进行了筒体内壁马鞍焊接机器人焊接系统的设计,研发出能自动完成内马鞍曲线焊接且结构紧凑的“三轴一体”焊接系统,提高了筒体内壁马鞍焊接机器人的自动化程度及焊接精度。关键词:筒体内壁;马鞍焊接;三轴一体
在锅炉、电力、化工、石油等很多行业中,经常遇到筒体与其相应接管焊成的马鞍形接缝[1]。目前针对外马鞍焊接技术及焊接设备的研究较多,而对筒体内壁马鞍焊接的研究相对较少,且筒体外马鞍焊接机多设计成焊炬在横梁上运动的结构,使得焊机沿立管直径方向体积较大,不适于筒体内壁马鞍焊接,尤其是密排立管[2-3]。故这些内马鞍接缝一般采用手工焊接或自动化程度较低的焊接装置焊接,使得筒体内壁马鞍焊接的效率低下,焊接质量不稳定。为此,专门研制了管子外径为Φ51 mm与内径为Φ800 ~Φ2 400 mm筒体正交的内壁马鞍形管-管全位置自动焊接机器人。
本文重点阐述筒体内壁马鞍焊接机器人焊接系统的结构设计,且针对筒体内壁空间狭小的特点首次提出“三轴一体”的设计方案。
1 马鞍焊接特点
1.1马鞍焊缝特点
接管与筒体两柱面正交形成一相贯线,为三维空间曲线,在焊接中通常称之为马鞍形焊缝。马鞍形焊缝在水平面投影上为一圆周曲线,高度方向上对于不同的角度θ,存在相应的落差h,称为马鞍落差,如图1所示,上为外马鞍、下为内马鞍[4-5]。

图1 筒体与接管相交示意图
根据其焊缝特点,满足马鞍形焊缝的焊接设备的运动功能应有以下几点:
(1)焊炬沿焊缝绕立管的回转运动。
(2)焊炬上下提升以实现马鞍落差的运动。
(3)焊接时的送丝运动
一个完整的马鞍焊接运动系统应能同步实现焊炬的回转、上下往复运动,以及送丝过程,即焊炬能够在送丝的同时走出相应的马鞍曲线。
1.2马鞍曲线方程
如图1所示,设筒体与接管半径分别为R和r,并且r<R,两圆柱体方程分别为:
x2+y2=r2,y2+z2=R2则其相贯线方程为:
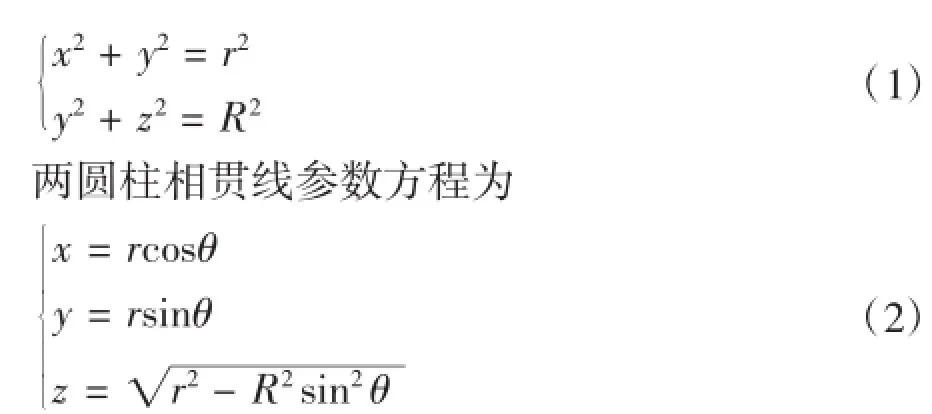
其中:θ为焊炬绕立管转角;r为立管半径;R为横管半径;z为焊炬马鞍落差。
焊炬运动满足上述方程时,可以形成马鞍轨迹,实现马鞍焊接[6]。
2 焊接系统运动分析
2.1技术要求
考虑到作业对象和焊接环境的特殊性,要将焊接机器人能够替代人工进行焊接,实现马鞍焊接的自动化作业,需要内壁马鞍焊接机器人的焊接系统满足如下要求:
(1)机械结构要紧凑,结构要简单
机器人需在筒体内部完成焊接,空间狭小,并且接管在筒体上分布较密,因此焊接系统需结构紧凑、简单。
(2)具有较好的实用性和经济性
由于焊接机器人是针对目前管焊接存在的问题进行的研发,故所设计的焊接机器人要有好的实用性和较高的性价比。
(3)较高的精度
机器人应具有较高的定位精度,马鞍曲线轨迹精度,以满足焊接质量高的要求。
2.2运动分析
本焊接系统具有三个运动:焊炬沿焊缝绕立管的回转运动、焊炬上下提升以实现马鞍落差的运动和焊接时的送丝运动。实现三个运动的方案分析:
(1)焊炬沿焊缝绕立管的回转运动。如图2所示,采用步进电机带动齿轮副运动,从动轮通过花键与回转轴连接,使回转轴在电机的驱动下做回转运动,可实现焊接过程中焊炬沿焊缝旋转一周的运动。

图2 回转运动简图
整个焊机通过定位轴安装固定在立管上。定位轴前端需通过卡盘装置将焊机固定在立管上,且卡盘中心要尽可能与立管轴线相重合,以保证焊炬良好的回转精度。定位轴不可以回转,为固定轴。
(2)焊炬上下提升以实现马鞍落差的运动。如图3所示,步进电机带动丝杠上的滑块做上下往复运动,将焊炬安装在滑块上,从而实现马鞍落差运动。

图3 提升运动简图
(3)焊接时的送丝运动。送丝电机驱动主齿轮和主送丝轮旋转,通过齿轮间的啮合传动,将焊丝传递到焊接位置。
3 焊接系统结构设计
通过上述分析,设计出将回转轴、定位轴及丝杠结构高度紧凑的“三轴一体”焊接系统,如图4所示。该焊接系统由回转机构、提弧机构及送丝机构组成。

图4 焊接系统机构示意图
3.1回转机构
回转机构的作用是实现焊炬沿着焊缝做回转运动。如图5所示,将定位轴1与电机4同时固定在箱壁上,通过齿轮传动副带动回转轴2绕定位轴1旋转,将焊炬固定在回转轴2上,从而实现焊接过程中焊炬沿焊缝的回转运动。

图5 回转机构示意图
3.2提弧机构
提弧机构的作用是实现焊接过程中焊炬的马鞍落差补偿,即焊炬的上下运动。如图6所示,固定在回转轴2上的电机1,带动丝杠3转动,焊炬固定在螺母4上,由此实现焊炬随回转轴做回转运动的同时完成马鞍落差补偿。

图6 提升机构示意图
提弧机构中焊炬马鞍落差z,需根据焊炬回转角度来确定,由式2已知马鞍落差方程为:

若令i=r/R,成为筒径比。设主轴的转速为v,其转角θ,则转角随时间t的变化为

焊炬的回转运动数学模型可表示为
x2+y2=r2
焊炬上下往复运动随时间t的变化的数学模型也可表示为

3.3送丝机构
送丝机构一般可以分成为两轮送丝和四轮送丝机构,由于受到整体空间限制,焊接系统将采用两轮推式送丝机构。主要由送丝电机、压紧机构、焊丝导向管等组成。送丝电机驱动主送丝轮和主齿轮旋转,通过主动齿轮和从动齿轮啮合传到压紧轮上,焊丝经过导向管在两轮之间通过,使进入焊炬的焊丝比较直,在焊接的过程中不会发生卡丝现象。如图7所示。

图7 送丝机构示意图
4 结束语
综上分析得出:
(1)所研制的筒体内壁马鞍焊接机器人焊接系统,取代了内马鞍手工焊接,且结构简单、成本低,焊接质量稳定且焊缝美观,有较好的市场前景。
(2)焊接系统采用“三轴一体”紧凑型结构设计,大大缩小了沿立管直径上的体积,适于筒体内壁狭小空间下的焊接,尤其对密排立管,效果更加明显。
(3)该焊接系统同样适用于密排立管的外马鞍管—管焊接技术上。
参考文献:
[1]张忠厚,李文娟,刘强,等.大直径筒体马鞍形曲线自动焊接机的研制[J].焊接学报,2000,21(1):68-70.
[2]曹俊芳,蒋力培,孙亚玲.管道全位置焊接机器人机械系统研制[J].电焊机,2006,36(12):10-12.
[3]杜洪旺.接管焊接机器人关键技术研究[D].哈尔滨:哈尔滨工业大学,2010.
[4]薛龙,邹勇,曹莹瑜,等.基于轨道焊接机器人的马鞍形焊缝焊接技术研究[J].电焊机,2010,40(1):19-23.
[5]周建平,王雅娟,徐燕,等.马鞍形焊缝焊接运动轨迹的自动控制[J].现代制造工程,2007,(9):117-119.
[6]吴敢生,张丽,吴宏.马鞍形焊缝焊接运动系统数学模型的研究[J].1999,21(6):485-487.
[7]韩红彪,崔琦,贾现召,等.油缸马鞍形曲线寒风自动焊接工艺[J].矿山机械,2006,34(9):101-103.
[8]潘年明,吴文秀.高压管汇自动焊接系统—送丝机构设计(一)[J].电焊机,2009,39(2):90-96.
[9]胡中华,陈焕明,熊震宇,等.弧焊机器人马鞍形工件焊枪姿态规划研究[J].设计与研究,2007,(04):11-13.
Design and Development of Welding System of Saddle Welding Robot for Inner Plate
CHEN Ya-wei,ZHANG Wei
(Zhongyuan University of Technology,Zhengzhou Henan 450007,China)
Abstract:Aiming at the problem that the welding automation is not high in the inner plate of the barrel body,design welding system of saddle welding robot for inner plate.Developed to complete the welding system of three axes together that can weld of saddle curve automatically and have a compact structure,improve the degree of automation of saddle welding robot of inner plate barrel body and precision of welding.
Key words:inner plate of barrel body;saddle weld;three axis together
中图分类号:TG44
文献标识码:A
文章编号:1672-545X(2016)03-0059-04
收稿日期:2015-12-30
作者简介:陈亚维(1962-),女,河南郑州人,教授,硕士生导师,研究方向:机械制造及其自动化。