机载反辐射导弹和常规反舰导弹协同规划算法
2016-07-12谢晓方刘家祺
谢晓方,刘家祺,孙 涛
(海军航空工程学院,山东 烟台 264001)
机载反辐射导弹和常规反舰导弹协同规划算法
谢晓方,刘家祺,孙涛
(海军航空工程学院,山东烟台264001)
摘要:机载反辐射导弹在攻击移动目标时容易受雷达关机影响而丢失目标,和常规主动雷达制导的反舰导弹协同攻击可以有效对抗目标雷达关机。为了达到协同作战目的,载机起飞前已知目标信息情况下,通过计划协同算法确定协同作战方案,方案包括载机和导弹各个航路点位置和到达该位置的时间点,然后按照在机场起飞前就制定好的方案实施具体作战行动。对计划协同算法进行了实例仿真,结果表明算法切实有效。
关键词:反辐射导弹,反舰导弹,航路规划
0 引言
空地反辐射导弹是一种以雷达或其他电磁辐射源为攻击目标的导弹,是压制防空系统的主要武器之一。海军反辐射导弹在攻击地面固定目标时能够达到预期的作战效果,但是攻击舰载雷达时效果却大打折扣,主要问题在于目标采取雷达静默关机和机动规避等战术对抗措施导致反辐射导弹丢失目标[1]。对于固定目标,导弹上的导航系统仍能保证导弹飞向关机目标,但是对于移动舰艇雷达目标,导航系统只能根据关机前的目标位置估计将来可能的位置来引导导弹,目标关机越早导航系统估计误差越大,导弹脱靶量相应地也越大。海军反辐射导弹对抗目标关机性能差的缺点可以通过和常规的主动雷达制导反舰导弹配合使用来得到一定程度的弥补[2],由于目标必须开机拦截或者干扰主动雷达反舰导弹,从而无法保持关机状态,因此,反辐射导弹更容易追踪其位置。
网络化作战为不同机种使用不同弹种进行协同攻击提供了可能,机载反辐射导弹和常规反舰导弹目前已经具备协同作战的技术基础[3-6]。如果载机起飞前已经获得目标位置和运动状态信息,并且按照特定的时间序列起飞,载机以一定的航向接近目标直至满足预定导弹发射条件,通过确定合理的载机起飞时间间隔使导弹最终同时到达目标,可以将这种协同模式称为计划协同。
1 计划协同方法
常规反舰导弹大多具有航路规划功能,通过设置合理的导弹航路规划点从需要的方向攻击目标。反辐射导弹没有航路规划功能,为使导弹从计划的方向攻击目标,需要飞机机动到相应的攻击战位,形成攻击态势。载机从机场沿跑道起飞后,需要进行航路规划以避开海上障碍物和敌方防空区域,巡航飞行到达指定位置后,通过数据链接受目标指示数据或通过机载雷达开机捕获到目标,进入攻击准备阶段,载机保持匀速直线航行,向导弹供电,进行射前检查并装订射击参数,满足要求后发射导弹。
载机飞行路线以及导弹水平面弹道如图1所示。图中目标当前位置在T0点,目标的速度TT和航向KT一般由目标指示直接给出,如果目标指示没有航向航速信息,根据前n个目标位置T-1,T-2,…,T-n,通过最小二乘滤波或者卡尔曼滤波法可算出目标航向航速。以目标位于T0时刻为时间起点,t=0开始制定作战计划,最后导弹命中目标预测位置在Ti点。
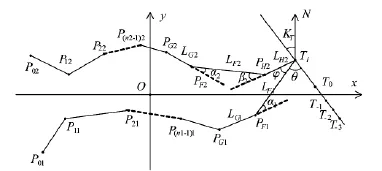
图1 计划协同攻击示意图
反辐射导弹发射点位于PF1,导弹发射距离为LF1,导弹预定攻击角为θ。载机攻击准备初始点位于PG1,载机攻击准备距离为LG1,载机航向和导弹航向夹角α1(小于最大扇面发射角)。载机机场位于P01,PG1是载机的第n1个航路规划点,中间航路规划点依次为P11,P21,…,P(n1-1)1。
常规反舰导弹航路规划点可以有多个,不失一般性设只有一个航路规划点PH2,PH2到目标距离为LH2,在航路规划点PH2处航向改变角β2。发射点位于PF2,发射点到目标距离为LF2。常规反舰导弹和反辐射导弹的协同攻击角为φ。载机攻击准备初始点位于PG2,载机攻击准备距离为LG2,载机航向和导弹航向夹角为α2(小于最大扇面发射角),载机机场位于P02,PG2是载机的第n2个航路规划点,中间航路规划点依次为P12,P22,…,P(n2-1)2。
考虑到地球表面是曲面,飞机和导弹航路规划应该选择球面坐标系,但计算比较复杂。在距离较近的情况下,误差在可接受范围内,也可采用平面直角坐标系。不失一般性,本文选择直角坐标系进行说明,O点选在三角形T0P01P02的中心,X轴指向东,Y轴指向北。
2 计划协同算法
选定坐标系后,用T0点坐标初始化Ti,反辐射导弹和常规反舰计划协同算法步骤如下:
①确定反辐射导弹预定攻击角∠PF1TiT-1=θ。指挥员根据作战需要灵活选择目标的薄弱防御方向来确定预定攻击角θ。
②确定常规反舰导弹和反辐射导弹的协同攻击角∠PF1TiPH2=φ。φ也是两型导弹末端弹道夹角。当敌方目标舰艇发现我方常规反舰导弹并用制导雷达照射时,协同攻击角φ越小,使得反辐射导弹的被动雷达导引头处在目标雷达主瓣内,接收到目标辐射信号才越强,但考虑到己方载机导弹的干扰和安全等问题,协同攻击角度φ又不能为零。
③求解导弹发射点PF1和PF2坐标。
反辐射导弹发射点PF1在以Ti点为圆心,LF1为半径的圆上,根据目标航向KT和攻击角θ可以确定直线PF1Ti的斜率,发射点PF1在圆和直线的交点上,PF1=f1(Ti,LF1,KT,θ)。
常规反舰导弹攻击角∠PH2TiT-1=θ+φ,PH2在以Ti点为圆心,LH2为半径的圆上,根据目标航向KT和攻击角θ+φ可以确定直线PH2Ti的斜率kH2,PH2在圆和直线的交点上,PH2=f2(Ti,LH2,KT,θ,φ)。
常规反舰导弹发射点PF2到航路规划点PH2的距离为LF2-LH2,PF2在以PH2点为圆心,LF2-LH2为半径的圆上,根据直线PH2Ti的斜率kH2和航路规划点航向改变角β2可以确定直线PF2PH2的斜率kH2,PF2在圆和直线PF2PH2的交点上,PF2=f3(PH2,LF2,LH2,KT,θ,φ,β2)。
④求解载机攻击准备初始点PG1和PG2坐标。
反辐射导弹载机攻击准备点PG1在以PF1点为圆心,LG1为半径的圆上,根据PF1Ti的斜率KF1和导弹发射角α1可以确定直线PG1PF1的斜率KG1,攻击准备点PG1在圆和直线PG1PF1的交点上,PG1=f4(PF1,LG1,KT,θ,α1)。
常规反舰导弹载机攻击准备点PG2在以PF2点为圆心,LG2为半径的圆上,根据PF2PH2的斜率KF2和导弹发射角α2可以确定直线PG2PF2的斜率KG2,攻击准备点PG2在圆和直线PG2PF2的交点上,PG2= f5(PF2,LG2,kG2,KT,θ,φ,β2,α2)。
⑤确定载机进入攻击准备状态前的飞行时间t01和t02。根据上一步计算得到PG2和PG2点坐标,通过设定中间航路点,在保证载机都有足够燃油返回机场和航行安全等其他约束条件下,利用各种飞机的成熟方法制定出一个合理的载机航路规划方案,载机从机场到最后一个航路点的飞行时间可根据航路规划方案公式计算得到,载机从P01到PG1的飞行时间为t01=f6(P01,P11…,PG1),载机从P02到PG2的飞行时间为t01=f7(P02,P12…,PG2)。
⑥求解载机导弹总时间中的最大值tmax。
载机导弹总时间包括从制定计划到飞机接到指令起飞前的准备时间、载机进入攻击准备状态前的飞行时间、攻击准备时间和导弹飞行时间4个部分。
从开始制定计划,下达作战命令,到反辐射导弹载机完成所有起飞准备工作所需时间为tJ1。反辐射导弹载机在攻击准备阶段速度为vz1,导弹平均速度为vd1,载机导弹总时间t1=tJ1+t01+LG1/vz1+LF1/vd1。
从开始制定计划,下达作战命令,到常规反舰导弹载机完成所有起飞准备工作所需时间为tJ2。常规反舰导弹载机在攻击准备阶段速度为vz2,导弹平均速度为vd2,常规反舰导弹载机导弹总时间t2=tJ2+t02+LG2/vz2+LF2/vd2。总时间差,则tmax=max(t1,t2)。
⑦计算在tmax时刻目标位置,并用该位置点更新Ti。更新方程为Ti=f8(Ti,VT,KT,tmax)。
⑧判断点Ti更新前后距离是否小于允许误差,如大于允许误差则重复上述步骤①~⑦,小于允许误差结束迭代。这样经过多次迭代计算后,tmax趋向于稳定值,预测命中目标点Ti也趋近于固定位置。
⑨确定最终协同方案(机场起飞消除时间差τ)。最后一次计算得到的航路规划点就是最终方案,载机的各个飞行时间节点由最后一次计算的时间推算。
如果t1>t2,反辐射导弹载机起飞时刻tQ1=tJ1,到达攻击准备点PG1时刻为tG1=tJ1+t01,到达发射点PF1的时刻为tF1=tJ1+t01+LG1/vz1;常规反舰导弹载机起飞时刻tQ2=tJ2+τ,到达攻击准备点PG2时刻为tG2=tJ2+τ+t02,到达发射点PF2的时刻为tF2=tJ2+τ+t02+LG2/vz2。
如果t1<t2,反辐射导弹载机起飞时刻tQ1=tJ1+τ,到达攻击准备点PG1时刻为tG1=tJ1+τ+t01,到达发射点PF1的时刻为tF1=tJ1+τ+t01+LG1/vz1;常规反舰导弹载机起飞时刻tQ2=tJ2,到达攻击准备点PG2时刻为tG2=tJ2+t02,到达发射点PF2的时刻为tF2=tJ2+t02+LG2/vz2。
3 实例仿真分析
算法中函数的具体确定方法如下:
①函数f1由以下方程组确定,可解出PF1点坐标(xF1,yF1)。
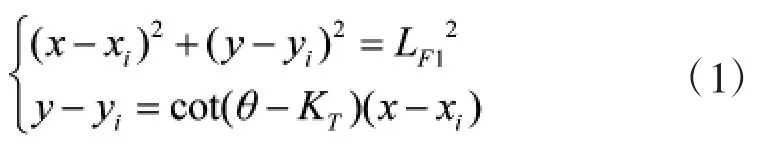
②函数f2由以下方程组确定,可解出PH2点坐标(xH2,yH2)

③函数f3由以下方程组确定,可解出PF2点坐标(xF2,yF2)

④函数f4由以下方程组确定,可解出PG1点坐标(xG1,yG1)

⑤函数f5由以下方程组确定,可解出PG2点坐标(xG2,yG2)

⑥假设反辐射导弹载机第i-1个航路点到第i个航路点(xi1,yi1)间平均速度vz1i,f6为

⑦假设常规反舰导弹载机第i-1个航路点到第i个航路点(xi2,yi2)间平均速度vz2i,f7为

⑧在tmax时间内,目标位置Ti=(xi,yi)更新方程f8为

已知:T0=(10,4)d,VT=0.9v,KT=45°,t0=5 min,θ=90°,φ=5°,α1=0°,α2=0°,β2=30°,LG1=1d,LG2=1d,LH2=1.2 d,P01=(-10,-10)d,P02=(-6.2,8.5)d,vz1=16v,vz2=16v,vd1=60v,vd2=18v,LF1=2d,LF2=4d,tJ1=10 min,tJ2=10 min,其中d和v分别为长度和速度参考量。
载机直接由机场沿直线飞向攻击准备点,协同航路规划如图2所示。
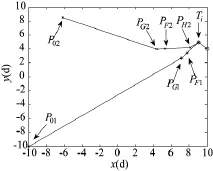
图2 计划协同攻击仿真图
计算得反辐射导弹载机导弹总飞行时间t1=85 min,常规反舰导弹载机导弹总飞行时间t2=60 min,最终协同方案见表1。算法在Intel Core(TM)i3(3.2 GHz)处理器、3 GB内存电脑上实现所需时间为5 s。
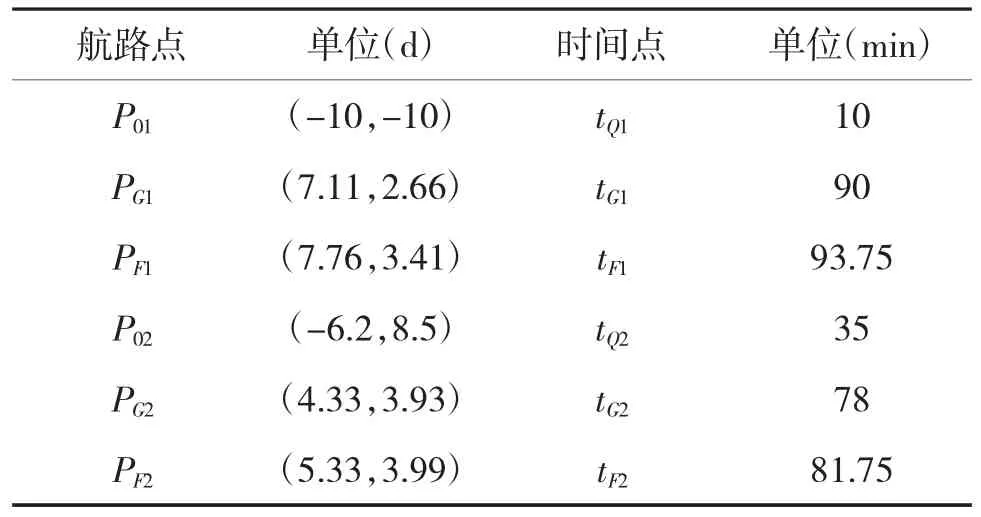
表1 计划协同方案
4 结论
仿真结果表明,按照计划协同算法计算得到的协同方案安排载机的起飞时间,载机的航路点、攻击准备点和导弹发射点,常规反舰导弹的航路规划点以及到达各个点的时刻,能够保证机载反辐射导弹和常规反舰导弹按照协同攻击角攻击同一目标,并且在目标航行状态不变的情况下能同时命中目标。算法计算公式简便,解算速度快,具有有效性和实用性。
反辐射导弹可以利用目标辐射寻的,提高自身命中精度,如果目标关机,虽然反辐射导弹命中概率会大幅下降,但主动雷达制导的常规反舰导弹对目标打击效果会大幅度提升,从而达到理想的协同作战效果。
参考文献:
[1]马明.反辐射导弹的特点及其应用[J].航空兵器,2001,37 (1):35-38.
[2]王喜焱,刘静,付伟.反辐射武器的技术特点及对抗措施[J].情报指挥控制系统与仿真技术,2002,23(5):15-19.
[3]王建国,高军亮,徐晓刚.反舰导弹航路规划概述[J].飞航导弹,2007,37(2):26-29.
[4]郑昌文,丁明跃,周成平.多飞行器协调航迹规划方法[J].宇航学报,2003,24(2):115-120.
[5]MCLAIN T W,CHANDIER P R. Cooperative path planning for timing-critical missions denver[C]// IEEE Proceedings of the American Control Conference,2003:296-301.
[6]毛云云.多飞行器协同航迹规划算法研究[D].哈尔滨:哈尔滨工业大学,2010.
Coordinated Path Planning algorithm of Airborne Passive and Active Radar Guided Anti- ship Missile
XIE Xiao-fang,LIU Jia-qi,SUN Tao
(Naval Aeronautical and Astronautical University,Yantai 264001,China)
Abstract:Airborne ARM often loses target while attacking moving target which radar shutdown. Cooperating with conventional active radar guided anti-ship missile is an effective way to confront with target radar shutdown. In order to cooperate with each other,the cooperation fight scheme is determined by coordinated path planning algorithm under the condition that the target information is given to aerial carrier before they take off. The scheme includes the position and the time of each route point of the missiles and their aerial carriers. Then the combat operation starts from the airport according to the scheme. Simulation of the coordinated path planning algorithm shows that the algorithm is effective.
Key words:ARM,anti-ship missile,path planning
中图分类号:TP391.9;TJ761.1
文献标识码:A
文章编号:1002-0640(2016)05-0086-03
收稿日期:2015-03-05修回日期:2015-05-07
作者简介:谢晓方(1962-),男,河北承德人,教授,博导。研究方向:海军火力指挥与控制。