基于深度卷积神经网络的蛇形机动航迹图像识别*
2016-07-12郑昌艳
郑昌艳,梅 卫,王 刚
(军械工程学院,石家庄 050003)
基于深度卷积神经网络的蛇形机动航迹图像识别*
郑昌艳,梅卫,王刚
(军械工程学院,石家庄050003)
摘要:为提高防空武器系统对空袭目标的拦截防御能力,针对现有蛇形机动识别算法鲁棒性较差的问题,提出了将航迹坐标数据转化为图像,利用深度神经卷积神经网络进行航迹模式分类的方法。针对航迹数据直接转化为图像时存在机动幅度不明显或过大的问题,提出了有效解决方案。基于CAFFE平台进行了大量仿真实验,确定了适宜于航迹模式分类的深度卷积网络结构和网络参数。实验结果表明,该方法能有效提高蛇形机动航迹识别的鲁棒性。
关键词:蛇形机动,图像识别,深度卷积神经网络,CAFFE
0 引言
对于新型高速无人机、再入飞行器、战斗机及反舰导弹、巡航导弹等,蛇形机动是一种成熟应用的规避技术,典型的巡航导弹弹道如图1所示。该机动很大程度上增加了雷达的跟踪误差、高炮前置计算误差和导弹追踪的飞行过载,对防御系统构成了巨大威胁。因此,拦截蛇形机动目标是现代防御拦截系统研究的热点,也是未来拦截技术发展必须解决的关键问题之一[1]。

图1 典型的巡航导弹弹道
基于现有的目标跟踪技术,高炮集火射击很难完成对高速机动目标精确打击,空域窗射击体制[2]通过合理预设弹丸散布中心,扩大有效毁伤目标区域,能有效提高高炮打击效能。对于蛇形机动目标,空域窗射击参数需在识别蛇形机动模式基础上,根据目标蛇形机动中心线、机动幅度等进行弹丸散布设置;导弹武器系统采用微波、激光、红外或者光电复合制导技术,在目标做蛇形机动时会追随其做高速机动,严重影响其自身系统的稳定性与可靠性。在对目标跟踪基础上,若能判别其是蛇形机动模式,沿着蛇形机动中心线进行追踪,对提高导弹性能的稳定性具有重要意义。
目前识别目标蛇形机动的方法主要是通过提取目标运动轨迹几何参数特征。文献[3]通过提取目标位置变化率特征实现对蛇形机动的识别,但文献[3]论述的蛇形机动特征只在蛇形机动中沿着特定方向成立,且对噪声敏感,鲁棒性较差。文献[4]将图像处理中边缘拐点检测方法应用到运动模式分段处理上,之后运用运动学分析法识别目标运动模式,但文献[4]将重点放在弹道分段方法上,对蛇形机动模式识别论述较模糊。文献[5]将空中目标常用战术机动动作分割成直线、左转、右转3种基本飞行动作,在编码基础上进行目标机动类型识别,此方法对探测目标坐标精度要求较高,且未包含3种基本飞行动作的具体识别方法。
航迹数据局部几何特征例如拐点、位置变化率等,由于噪声存在,难以得到统一的特征参数,对识别造成了很大困难。本文通过将航迹数据转化成图像,再利用图像识别技术进行航迹模式分类,着重在航迹的整体动态趋势识别,避免了提取航迹局部几何特征,提高了识别鲁棒性。由于深度卷积神经网络能对输入样本的平移、缩放、扭曲保持高度不变性,并且在训练时其共享权值的特点大大降低了训练时间,目前已在图像识别领域广泛应用[6],由此本文提出了基于在深度卷积神经网络的蛇形机动航迹图像识别方法。
1 飞行航迹图像样本库建立
本文研究飞机飞行机动模式的分类,将飞机常用机动类型划分为3类:直线、蛇形机动、左右转弯3类。主要考虑飞机在相对参考坐标系水平面上的机动。
1.1航迹坐标数据生成
设观测点为坐标原点O,以正东方向为X轴,以正北方向为Y轴,铅垂方向向上为H轴,目标航向θ(北偏东度数)是以正北为0°沿顺时针方向度量的角度。飞机在东北方向由远及近以200 m/s~300 m/s的速度朝向观测点飞行。飞机机动考虑飞行员承受负载等问题,蛇形机动周期在5 s~10 s,考虑飞机连续做多个蛇形机动;左右转弯时间一般在3s~5 s;设定航迹识别是在检测到目标开始机动时触发,为方便识别流程,固定仿真时间为10 s。转弯机动航迹设置是以转弯运动开始以直线运动结束。
设置量测角噪声标准差为1mil,量测距离噪声标准差为5 m,采样频率50 Hz,采用卡尔曼滤波跟踪。
对不同飞行速度、不同飞行方向、不同机动周期、不同机动幅度的航迹进行仿真,得到大量二维航迹数据。
1.2航迹图像生成存在问题
利用MATLAB将航迹坐标(X,Y)转化为图像。值得注意的是,MATLAB显示图像会综合考虑X轴、Y轴取值范围的大小,自动选取坐标分度值以达显示细节最优,然而这样生成的图像存在以下问题:
(a)当航迹沿着X轴、Y轴时,垂直于飞行方向有小幅度波动,MATLAB会自动调小分度值已显示波动,导致图形剧烈波动。
(b)目标蛇形机动,所沿中心线航向角在30°~60°范围时,机动幅度相对X轴、Y轴的运动距离显得微不足道,导致机动部分不明显,与直线飞行很难区分。
由于是对航迹曲线整体变化趋势进行识别,主要考虑航迹曲线图形规律而非数值本身大小,故可人为进行图像显示处理以达到良好的曲线区分效果。
1.3图像生成处理方案
对航迹进行最小二乘直线拟合,得到飞行大致所沿方向,得到拟合直线的斜率与截距,斜率对应着航向角θ,判断航向角:
①当θ<5°或θ>85°时,存在1.2节中的问题(a),此时将垂直于飞行方向的坐标轴最小值最大值范围进行扩大,可有效解决该问题,如图2所示。
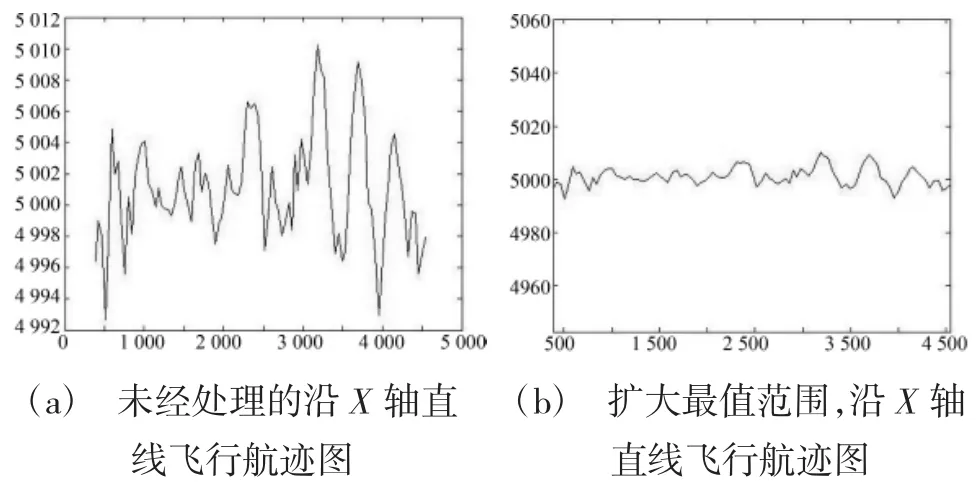
图2 扩大最值范围,沿X轴直线飞行航迹对比图
②当30°≤θ≤60°时,存在问题(b),将Y坐标值减去拟合直线上的对应值,X坐标值保持不变。该操作类似于将曲线向X轴进行了旋转,这样相当于将θ变成了0°,又出现了问题1.2节中的问题(a),则需要再运用①的解决方案。蛇形机动进行该操作如图3所示。
为增强图像显示效果,去掉无关信息,在操作①、②基础上对图像曲线进行加粗,去坐标轴,RGB图像转为灰度图像等操作。由于神经网络输入端口固定,故还需对图像大小进行归一化,均归一化到256×256像素,效果如图4所示。
对所有航迹数据进行上述处理。生成3种机动类型样本各1 000个作为训练样本集;各900个作为验证样本集;生成1 000个航迹图像作为最终测试样本集。
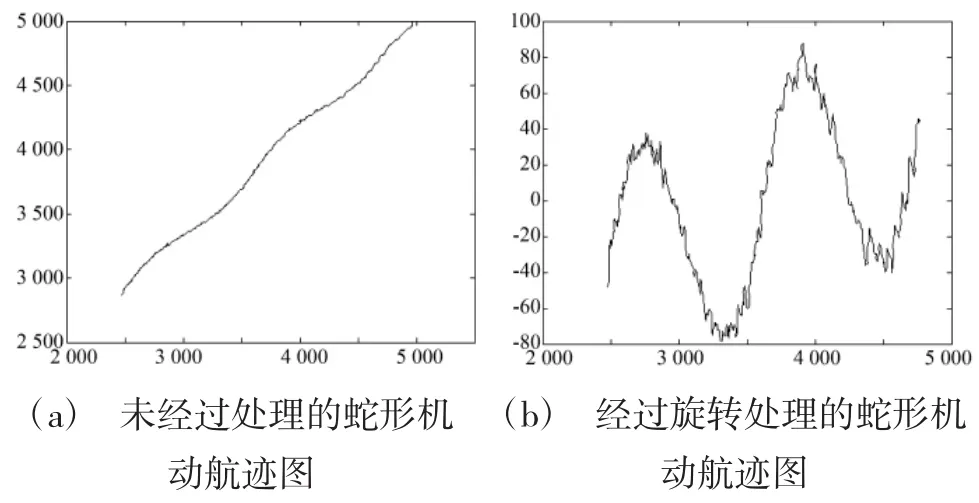
图3 旋转处理后蛇形机动航迹对比图
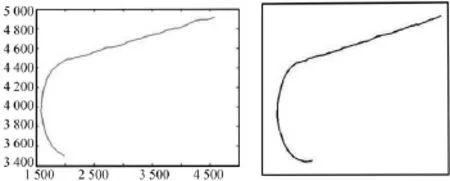
图4 去掉无关细节的转弯飞行航迹对比图
2 深度卷积网络
深度学习的概念源于人工神经网络的研究。深层模型是包含多个隐藏层的人工神经网络,多层非线性结构使其具备强大的特征表达能力和对复杂任务建模能力。而之前的深层模型在训练上难以克服陷入局部最优、过拟合等问题,直到2006年Hinton等人提出了深度学习的概念,通过逐层初始化等理论有效克服了这些问题,使人工神经网络焕发了生机。
研究表明深层神经网络比浅层神经网络更能提取输入数据本质的特征,而由于深层卷积神经网络将局部连接、权值共享和空间下采样结合起来,大大减少了网络的训练参数,不但解决了浅层学习结构需要人工提取图像特征的局限性问题,而且提高了分类的准确性和模型的泛化能力。
2.1深度卷积网络结构
卷积神经网络是一个多层神经网络,每层由多个二维平面组成,每个平面由多个神经元组成。典型深度卷积网络模型[7]如图5所示。
第一层是输入层,紧接下来是若干卷积层和下采层,最后一个是分类器,如Softmax分类器。

图5 典型深度卷积网络结构
2.2深度卷积网络的学习算法
卷积神经网络的学习过程主要包括卷积层的学习和下采样层的学习。
“基于此,后勤运营风险的有效控制必须依靠科学的风险管理方法。”沈崇德表示,科学的风险管理体系可以帮助每位后勤员工识别、判断工作中发生风险的可能性,增强风险防范意识,提高应对突发风险的能力。
2.2.1卷积层的学习
卷积层是利用局部连接和权值共享,减少网络自由参数个数,降低网络参数选取复杂度。在一个卷积层中,用一个可学习的卷积核与上一层若干个特征图进行卷积,再通过一个激活函数f,如Sigmoid函数等,利用式(1)就可以得到相应的输出特征。

这里l表示层数,k是卷积核,*表示二维卷积,b是偏置,Mj是输入特征图集合。
2.2.2下采样层的学习
下采样层利用图像局部相关性原理,对图像进行子抽样,在减少数据处理量的同时保留有用信息。这里通常是对前一层对应的特征图中向量特征进行池化操作。池化分为平均池化和最大池化等,池化后其特征图的个数与相邻前一层卷积层特征图个数相同,但特征图变小,输出的特征可用式(2)计算。

其中β是相应权值,b是相应偏置,down(·)表示下采样函数。如果对输入特征图的p×p块特征值求平均或最大值,则输出特征图在两个维度上都缩小了p倍,减小了特征的分辨率,实现了对平移、缩放、扭曲的不变性。
深度卷积神经网络,输入端直接输入图像像素,采用由前向后逐层学习的方式,计算损失函数,再通过误差反向传播算法(Error Back Propagation)对整个训练参数进行调整。
3 航迹图像分类的深度卷积网络模型构造及参数选取
3.1网络整体构架
基于Alex Krizhevsky在CIFAR-10数据集上应用的三层深度卷积置信网络[8],根据自建数据集类型较少、图形易于分辨、样本量小的特点,去掉了优化措施,只保留卷积层、全连接层和分类器,如图6所示。非线性修正定义将在下一节给出。
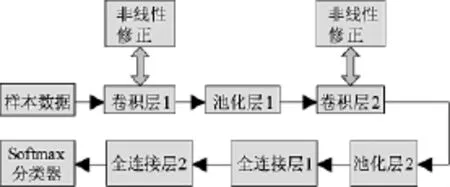
图6 识别航迹图像神经网络整体构架
3.2参数选取
奇数尺寸的滤波器能获取到更好的中心特征,故卷积核设为奇数,且卷积核大小根据图像明显特征所占像素大小确定,11×11像素足够取得蛇形机动局部特征信息。
非线性修正通过简单算法y=max(x,0)强制某些数据为0,从而得到特征的稀疏表达[9],达到和预训练同样的目的。故卷积后并未采用常用的激活函数进行处理,而是进行了非线性修正层处理。
重叠池化能够降低识别错误率,且能在一定程度上防止过拟合[9],故采用重叠池化,池化核大于池化步长。本文选取池化核为2,池化步长为1。
网络学习速率过大容易造成选取不到神经网络目标函数最优参数,速率过小则导致学习过程太长。
卷积核、池化核、步长大小的选取,整体的网络训练参数包括学习速率、学习策略均是通过实验得到最佳。本文实验部分给出了最佳参数的结果,并进行分析。
3.3实验实施
3.3.1实验平台介绍
本文仿真实验基于GPU NVIDA Kesla 40,16G内存,Linux操作系统台式电脑,CAFFE软件平台。
CAFFE[8]全称Convolutional Architecture for Fast Feature Embedding,是由伯克利视觉学习实验中心开发的基于C++库、拥有matlab、python接口的开源软件。它提供可修改的深度学习算法框架,集成了目前世界前沿的常见的卷积神经网络模型及其他深度学习模型。其模块化的代码和简单的神经网络分层定义,可让用户根据需求快速搭建自己的神经网络模型。CAFFE提供了CPU、GPU无缝切换,极大地提高了网络的训练速度。利用CAFFE软件搭建深度卷积模型,设置好各个模块参数,进行仿真实验。
3.3.2数据预处理
将所有航迹图像减去图像均值,CAFFE使用了leveldb数据格式,故需再将所有样本图像转化为leveldb数据格式,该数据格式具有高效的数据读写速度。
共有3类飞行航迹各1 000共3 000个图像训练样本,2 700个验证样本。验证样本是神经网络里用来检验样本是否出现过拟合现象设置的。验证样本与训练样本同时送入神经网络,计算损失函数大小,但验证样本损失函数大小仅用来判断网络是否过拟合,而不参与网络参数调整。当训练样本集和验证样本集损失函数均较小时,网络分类能力和泛化能力强,否则训练样本损失函数小而验证样本集损失函数大则是出现过拟合现象,即该网络对未训练过的数据泛化能力差。
CAFFE中设置了batch参数——每次同时送入网络计算的样本数量,用以提高训练速度。设置batch为30,并定义每向网络送入3次训练样本后进行一次验证,每次验证样本量同样是30。训练样本共送入90次,即进行了90×30=2 700次迭代,验证共进行了90÷3=30次。
3.3.3仿真实验
本文选取参数:卷积核为11,池化核为2,池化步长为1,网络学习速率为0.000 1。得到训练集损失函数随迭代次数的数据,验证集损失函数、正确率随着训练集迭代次数的数据,得图7~图9。
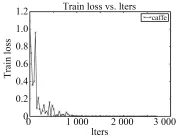
图7 训练集损失函数和训练迭代次数关系图
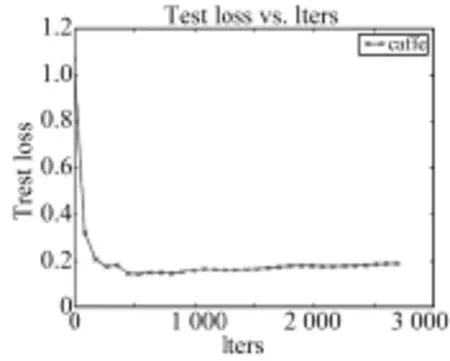
图8 验证集损失函数和训练迭代次数关系图
3.3.4结果分析
图7、图8总体显示随着迭代次数增多,损失函数越来越小,函数拟合越来越好。训练损失函数接近于0而测试损失函数却有所增高,说明存在一定程度的过拟合现象,这与航迹样本图像存在大量空白部分存在一定关系。下页图9所示,验证识别率达97%时达到了饱和。
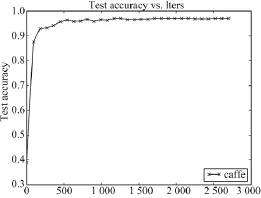
图9 验证集测试精度和训练迭代次数关系图
最后再送入1 000个随机样本对训练好的网络进行测试,最终识别率达到98%。将测试错误的图像提出,分析发现误判主要出现在蛇形机动和直线飞行生成了较为接近的航迹图像情况下。这是由于航迹图像是将航迹限定在较小的范围内进行显示,在机动幅度较小的情况下,幅度大小相比飞行直线距离较小,蛇形机动飞行图像与直线飞行图像很难区分。
由此说明,深度卷积神经网络能够高效识别不同类型航迹图像,但是航迹图像样本的生成伴随着大量冗余信息的产生,在处理方面还需改进。
4 结论
本文是研究利用深度学习理论识别蛇形机动的阶段性成果,创新性地将航迹识别问题转化成图像识别问题,利用深度卷积神经网络对直线、蛇形机动与转弯机动航迹图像进行分类识别,测试识别率达98%,有效提高了蛇形机动识别的鲁棒性。下一步将在航迹图像生成方面,如何将航迹数据有效转化为航迹图像,并且减小过拟合方面进行深层次研究。并且考虑深度学习在对时序数据识别方面的应用,直接利用航迹数据(不转化为图像)进行学习与探究。
参考文献:
[1]刁兆师,李海田,单家元.拦截蛇形机动目标考虑自动驾驶仪动态特性的最优制导律[J].北京理工大学学报,2013,33(3):229-234.
[2]胡金春.未来空域窗体制下的火力控制理论[D].南京:解放军理工大学,1998.
[3]刘恒,梅卫,单甘霖.基于位置变化率的蛇形机动弹道识别[J].探测与控制学报,2013,35(3):37-40.
[4]韩萍,于俊伟.基于运动学分析的反舰导弹弹道识别[J].电光与控制,2011,18(9):31-34.
[5]冷画屏,吴晓锋,王慕鸿.空中目标战术机动类型的实时识别[J].火力与指挥控制,2011,36(1):64-66.
[6]余凯,贾磊,陈雨强,等.深度学习的昨天、今天和明天[J].计算机研究与发展,2013,50(9):1799-1804.
[7]EKLUND P,VILLERD J. A survey of hybrid representations of concept lattices in conce-ptual knowledge processing[C]// Lecture Notes in Computer Science,2010,5986:296-311.
[8]ALEX K.Convolutional deep belief networks on CIFAR-10 [EB/OL]. http://www.cs.utoronto.ca/~kriz/,2013-05-18.
[9]ALEX K,GEOFFTRY E H. Imagenet classification with deep convolutional neural networks[C]// Advances in Neural Information Processing Systems,2012,25:1097-1105.
Deep Convolutional Neural Networks for the Image Recognition of “S- Maneuver”Target
ZHENG Chang-yan,MEI Wei,WANG Gang
(Ordnance Engineering College,Shijiazhuang 050003,China)
Abstract:To improve the interception ability of anti -aircraft weapons and solve the existing robustness problem in the“S-maneuver”target recognition algorithm,the tracks coordinate data into images are transformed and then took advantage of deep convolutional neural networks to recognize it. The feasible method to solve the maneuver range inconformity problem is proposed which existed as the coordinate data transformed into images. The suitable deep convolutional architecture and network parameters have been identified after plenty of experiments based on CAFFE software platform. It is proved to be an efficient method to improve the robustness of target“S-maneuver”recognition.
Key words:S-maneuver,image recognition,deep convolutional neural networks,CAFFE
中图分类号:TP271
文献标识码:A
文章编号:1002-0640(2016)05-0066-05
收稿日期:2015-04-16修回日期:2015-05-28
*基金项目:国防“十一五”预研基金(40405020204);国防“十二五”预研基金资助项目(40405070102)
作者简介:郑昌艳(1990-),女,江苏南京人,在读硕士研究生。研究方向:目标跟踪、机器学习。