用于碳纤维织物的多层织机经纱张力检测方法
2016-07-12杨建成
鲁 喜, 杨建成
(1. 天津工业大学 机械工程学院, 天津 300387; 2. 天津市现代机电装备技术重点实验室, 天津 300387;3. 天津市机械基础及纺织装备设计虚拟仿真实验教学中心, 天津 300387)
用于碳纤维织物的多层织机经纱张力检测方法
鲁 喜1,2,3, 杨建成1,2,3
(1. 天津工业大学 机械工程学院, 天津 300387; 2. 天津市现代机电装备技术重点实验室, 天津 300387;3. 天津市机械基础及纺织装备设计虚拟仿真实验教学中心, 天津 300387)
为提高经纱张力的控制精度,防止碳纤维在送经机构长距离输送过程中因自身质量下垂,导致经纱张力控制精度不高对织物质量造成影响,结合现有的经纱张力控制方法,提出基于神经网络的模糊信息融合综合算法。根据神经网络得到的权值函数,以多层织机的送经机构为研究对象进行实验。实验过程中,在多层织机送经机构的不同位置安装张力传感器,通过无线信息采集系统,对经纱张力进行在线多点检测,然后将检测的张力信号进行模糊信息融合。实验结果表明:多传感器信息融合的识别准确率优于单传感器,提高了用于碳纤维织物的多层织机经纱张力的控制精度。
多层织机; 张力检测; 碳纤维织物; 模糊控制; 信息融合
本文研究内容来源于天津工业大学承担的国家十二五科技重点支撑项目的子课题“碳纤维多层角联机织装备及技术研制”,该项目已通过科技部验收,然而在织造变截面织物时,送经机构还存在长距离、多工段及经纱层数多而导致经纱下垂等问题,且经纱张力检测点少,经纱张力的控制精度较低,直接影响三维多层织物的品质,所以,碳纤维多层织物织造过程中经纱张力的检测精度与优化控制算法成为提升该装备性能的核心问题。
国内很多学者对经纱张力的检测进行了研究,例如对霍尔式张力传感器的磁钢探头建立运动学模型,提出了动态张力信号提取方法[1];以活动后梁为研究对象对张力进行检测[2],这些都是以活动后梁作为研究对象。然而,在用于碳纤维织物的多层织机时,由于碳纤维的特殊性,经纱在长距离输送过程中会出现下垂,只以活动后梁为研究对象不能精确地检测织机的经纱张力,需要通过多点检测的方式来达到张力检测精度的要求。多传感器信息融合理论已经成熟,已广泛应用在各个领域,但在电子送经机构中应用的报道很少。经纱张力的变化为时变非线性,较难确定合适的张力模型[3]。本文提出基于神经网络的模糊融合综合算法,为解决这些问题提供了有效的理论参考。
1 多层织机的经纱张力检测原理
送经系统包括经纱退绕、张力控制、拢纱及经纱卷绕部分等[4],如图1所示。送经机构的张力部件由伺服退绕、张力补偿、经纱张力检测以及卷绕部件组成。由于碳纤维拉伸强度高、剪切强度低等特点[5],这种长距离输送使碳纤维因自身质量大而下垂,从而造成经纱张力控制精度低。要保证片状纱线的恒张力系统控制,必须在上述各个环节中添加相应的传感器来检测张力,包括单纱张力检测和片纱张力实时检测。在张力补偿装置上安装角位移传感器和拉压力传感器;在张力检测辊上装有拉压力传感器;在五辊片纱张力装置中的第1和第5个张力辊上安装拉压力传感器以及在卷绕装置中安装压力传感器。
2 神经网络模糊融合综合算法
2.1 模糊综合评判
当权重集A和模糊矩阵R为已知时,利用模糊变换进行模糊综合推断。
(1)
因此,权重集A值的大小决定了综合评判结果集P,所以,运用模糊综合评判方法应先求解其权重的值[6]。
2.2 模糊综合评判权重的求解
由于各子系统检测信息与多传感器信息融合数据有效性之间存在模糊性以及高度非线性[7]。为此,结合模糊理论和神经网络理论,通过神经网络的学习功能获得各子系统检测参数与信息融合数据有效性之间的网络权值系数[8],然后通过一定的关系转换为模糊综合评判的权重。
通过运算求得最小值为权值ωj(j=1,2,…,n)的函数。在给定权值ωj的范围[0,1]中,利用变尺度混沌优化算法[9]求得最优解ωj(j=1,2,…,n)后,可作以下转换:
(2)
2.3 模糊关系矩阵的确定
由于经纱张力的状态受各种外界影响,为了方便分析,选用上述5种传感器,分别表示为:传感器1~传感器5。本文采用决策级融合。图2示出多传感器模糊信息融合框图。

通过权重计算求得模糊向量A=(a1,a2,a3,a4,a5)。按照线性变换,得
(3)
式中:P的各元素Pj(j=1,2,3)即为张力检测时,融合后判断经纱张力属于状态j的可能性。
3 实验结果与分析
在实验中,由混沌优化法得到传感器的权重向量为(0.30,0.25,0.15,0.10,0.20)。
在融合过程中,各传感器检测的数据经过归一化处理,结果如表1所示。

表1 实验数据
某一时刻各个传感器的隶属度值和其所对应的经纱张力状态及同时所得融合结果如表2所示。
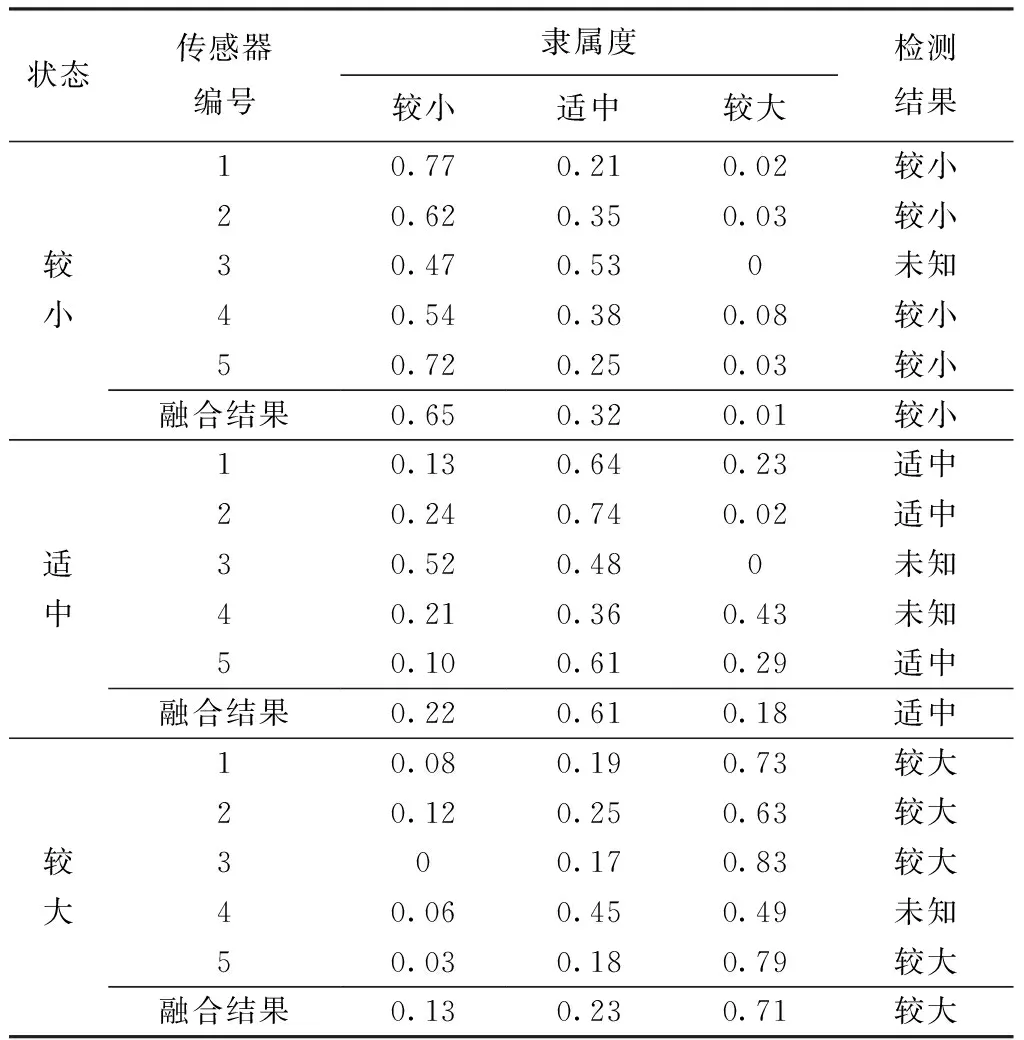
表2 传感器单独识别及融合识别结果
从表2可看出,在该时刻,比如融合结果为P=(0.22,0.61,0.18)时,采用最大隶属度方法对结果进行分析,可知经纱张力处于适中状态。
在实验中,对经纱张力检测的20组数据中的传感器1的隶属度值与融合结果进行比较,结果见图3。准确率增加2.6%,表明融合后的不确定性显著降低,既能发挥信息融合的优点,又能避免单传感器检测的缺陷,明显提高了经纱张力检测的精度。
本文针对多层织机的送经机构进行了相关的实验。图4示出利用单传感器检测状态下经纱出现下垂的情况。图5示出采用多传感器进行多点检测的状态下经纱呈现平行退绕的情况。由图4、5可看出,经纱由下垂变为绷紧状态,张力明显得到了改善。
4 结 论
在多层织机送经系统中,经纱张力的控制精度不高,特别是因为经纱长距离输送而导致经纱下垂等问题,对三维织物的织造产生了很大的影响。为提高送经系统经纱张力的控制精度,降低张力检测传感器的不确定性,将基于神经网络的模糊综合评判方法应用到送经系统中是可行的。通过实验,将20组单传感器检测数据与多传感器信息融合的数据进行比较,准确率增加了2.6%,经纱张力的检测精度显著提高。因此,通过在多层织机送经机构中的不同位置安装5组不同类型传感器进行多点检测,使经纱由下垂变为绷紧状态,张力明显得到了改善。
FZXB
[1] 吴震宇,陈琳荣,李子军,等.接触式纱线张力传感器动态测量模型[J].纺织学报,2013,34(8):138-142. WU Zhenyu, CHEN Linrong, LI Zijun, et al. Dynamic measurement model of contact tension sensor for yarn [J]. Journal of Textile Research, 2013, 34(8): 138-142.
[2] 倪敏娜,李萍,李艳.基于模糊多属性群决策的经纱张力检测及控制方案优选[J].东华大学学报(自然科学版),2014,40(3):282-287. NI Minna, LI Ping, LI Yan. Schemes selection of warp tension measurement and control based on fuzzy multiple-attribute group decision making [J]. Journal of Donghua University (Natural Science), 2014,40(3): 282-287.
[3] 杨建成,蒋秀明,周国庆,等. Fuzzy-PID复合控制在电子送经中的应用[J].纺织学报,2008,29(4):115-118. YANG Jiancheng, JIANG Xiuming, ZHOU Guoqing, et al. Application of Fuzzy-PID compound control on loom electronic let-off and take-up[J]. Journal of Textile Research, 2008, 29(4):115-118.
[4] 周香琴,刘宜胜.织机开口引起的经纱张力变化规律[J].纺织学报,2014,35(5):132-136. ZHOU Xiangqin, LIU Yisheng. Warp tension change caused by shedding on loom[J]. Journal of Textile Research, 2014,35(5):132-136.
[5] 邓海龙.现代织机电子送经机构控制模式的研究[J].纺织机械,2012(3):27-30. DENG Hailong. Study on the control mode of electronic feeding mechanism in modern loom[J]. Textile Machinery. 2012(3):27-30.
[6] 焦蕾,殷锋社.基于学生模型的模糊综合评判方法研究[J].电子设计工程,2011(9):97-99. JIAO Lei, YIN Fengshe. Method of student model and fuzzy comprehensive evaluation [J]. International Electronic Elements, 2011(9):97-99.
[7] SAJEDI S, KHALIFEH F, KARIMI T, et al. Harmonics estimation investigation using a new fuzzy adeline neural network method[J]. Research Journal of Applied Sciences Engineering & Technology, 2012, 4(7):735-748.
[8] 付家才,万遂.基于D-S证据理论和BP神经网络的多传感器信息融合[J].自动化与仪器仪表,2011(1):22-24. FU Jiacai, WAN Sui. Multi sensor information fusion based on D-S evidence theory and BP neural network [J]. Automation and Instrumentation, 2011(1): 22-24.
[9] 杨玲玲,马良,张惠珍.多目标0-1规划的混沌优化算法[J].计算机应用研究,2012,29(12):4486-4488. YANG Lingling, MA Liang, ZHANG Huizhen. Chaotic optimization algorithm for multi-objective 0-1 program-ming problem [J]. Application Research of Computers, 2012, 29(12):4486-4488.
[10] 付华,高婷,刘洋.多传感器模糊信息融合在煤矿安全中的应用[J].传感器与微系统, 2008,27(5):114-120. FU Hua, GAO Ting, LIU Yang. Application of multi-sensor fuzzy information fusion in mine safety [J]. Transducer and Microsystem Technologies, 2008, 27(5):114-120.
Detection method of warp tension in multilayer loom for carbon fiber fabric
LU Xi1,2,3, YANG Jiancheng1,2,3
(1.SchoolofMechanicalEngineering,TianjinPolytechnicUniversity,Tianjin300387,China; 2.TianjinKeyLaboratoryofModernMechanicalandElectricalEquipmentTechnology,Tianjin300387,China; 3.TheVirtualSimulationExperimentalTeachingCenterofMachineryandTextileEquipmentDesignBasis,Tianjin300387,China)
The carbon fiber has the tendency of dragging during long distance transportation let-off process due to weight. The dragging will lead to inaccurate control on warp tension, and further influence fabric qualities. In order to improve the control precision, the fuzzy neural network information fusion algorithm was presented in combination with the existing warp tension control method. According to the weight function of neural network, the experiment was carried out on the mechanism of multilayer loom. During the experiment, the tensioner was mounted in different positions of multilayer loom let-off mechanism. Through the wireless data acquisition system, the warp tension was online detected, and then the detected signals was fuzzy information fused. Experimental results show that the multi sensor information fusion recognition accuracy is better than that of single sensor, and the precision of control on warp tension in multilayer loom used for carbon fibers were increased.
multilayer loom; tension detection; carbon fiber fabric; fuzzy control; information fusion
10.13475/j.fzxb.20150703205
2015-07-16
2016-03-18
国家十二五科技支撑项目(2011BAF08B00;2011BAF08B02)
鲁喜(1989—),男,硕士生。主要研究方向为纺织机械。杨建成,通信作者,E-mail:yjcg589@163.com。
TS 105.1
A
