10kW高速永磁同步电主轴驱动控制系统设计*
2016-07-07朱明星谢清明
朱明星,谢清明,2
(1.北京动力机械研究所,北京100074;2.国家精密微特电机工程技术研究中心,贵州贵阳550008)
10kW高速永磁同步电主轴驱动控制系统设计*
朱明星1,谢清明1,2
(1.北京动力机械研究所,北京100074;2.国家精密微特电机工程技术研究中心,贵州贵阳550008)
摘要:介绍了一种10kW高速永磁同步电主轴驱动控制系统。系统采用背靠背双向PWM拓扑结构,DSP+ CPLD为核心控制单元,通过无位置传感器检测技术和矢量控制算法驱动控制高速主轴电机,具有良好的动静态速度调节性能。系统包括主电路、控制单元、采样电路、驱动电路、监控和接口电路、保护电路等。详细介绍了硬件设计的思路和技术参数,制作了试验样机,并搭建了高速试验台,对样机进行了试验验证,试验结果证明了本系统良好的动静态性能。
关键词:高速永磁同步;电主轴;矢量控制;无位置传感器
1 前言
电主轴是将电动机直接装在主轴头内,减少了一般主轴需要的皮带轮、齿轮或变速箱等机械变速机构,提高了传动效率,而且将松拉刀机构与电主轴接为一体,使其结构紧凑,实现了所谓的零传动[1],一般用于加工中心、高速铣床等机床中。近来有一个新的发展趋势,是在电主轴中采用交流永磁同步电动机。对比交流异步电动机,它有以下优点[2]。
(1)转子用永磁材料制造,工作过程中转子不发热。而当采用交流异步电动机时,定子发热虽可用水冷却,但转子发热却无法得到充分冷却;
(2)功率密度更高,即可用较小的尺寸得到较大的功率和转矩,有利于缩小电主轴的径向尺寸。
(3)转子的转速严格与电源频率同步,因此功率因数高,效率也高。
(4)可采用矢量控制,且电路比异步电动机简单。
但国内鲜有开发研制采用永磁同步电动机的电主轴的厂家,且国内高性能数字交流主轴驱动系统很多都依赖进口,价格高、维修困难,国内自主研发的驱动系统调速范围和控制精度往往难以满足要求。
本文介绍了一种10kW高速电主轴驱动控制系统,控制转速最高可达60000r/min,采用DSP+CPLD的精密数字控制系统,无位置传感器检测技术使得系统更加简单可靠,15kHz的开关频率使得系统谐波更小,控制更加平稳。背靠背双向PWM拓扑结构方便实现系统的四象限运行,另外系统还具备完善的保护功能。
2 系统结构
2.1主电路
系统主电路采用交-直-交电压型PWM双向变流器结构形式,如图1所示。

图1 系统主电路结构示意图
功率开关器件选用某半导体公司的智能功率模块(intelligent power module,简称IPM)。该器件是集控制、驱动、保护于一体的智能型IGBT模块。IPM的驱动信号由中央控制器的芯片产生,经过闭环计算和死区延时后,通过光耦驱动IPM进行开关变换。直流母线选用两串五并的支撑电容组合C,使直流母线电压平稳,电容间用均压电阻保证串联电容的均衡耐压。同时,为了实现快速制动和瞬时能量调节,设置了刹车电阻电路,当母线电压高于刹车阈值时,功率开关管S闭合,系统将能量消耗在电阻R0上,实现快速能耗制动。电机侧和网侧分别串联滤波电抗器,减小系统谐波和扰动。由于初上电时母线电容容量较大,为限制上电瞬间电流,在电网侧设计预充电电路,防止瞬间能量过冲对硬件的损害。和传统驱动器不同,网侧采用三相可控变流拓扑,配合双向PWM控制技术,可以实现系统四象限运行。
2.2控制单元
控制系统采用双CPU结构,分别控制电机侧和电网侧。采用32位微处理器TMS320F2812作为主CPU,与可编程外围器件EPM7192SQI160构成核心控制单元,主要承担电动机转速计算、速度及位置的PID调节、矢量变换计算等任务。从CPU采用TMS320F2812,主要实现电网侧可控升压整流、面板监控管理、对外接口通讯及指示等功能。双CPU之间通过CAN总线进行串行通信,通信波特率为1MHz,保证一定范围内的远程监控。速度及位置检测电路、数字及脉冲量输入电路、逻辑译码电路和功率模块的死区补偿电路均采用大规模逻辑门阵集成电路,提高了系统的可靠性。控制电源采用自主设计760V转13.8V电源模块,电源模块和功率电路集成设计,保证了结构和性能的优化。
2.3采样电路
采样电路主要有以下几部分。
(1)转速及位置检测。由于数控机床要求转速控制精度较高,为此系统采用速度闭环控制策略。传统的机械式传感器存在机械安装困难、增加电机轴向长度和转动惯量等问题,故本系统采用无位置传感器算法,通过检测到的电机电流估算电机反电势,最终通过计算角度来确定电机转速和位置。给定速度与反馈速度的误差通过PID调节器调节转矩电流值后来实现速度闭环控制。
(2)电压采样。由于要通过可控升压整流维持直流母线电压,故需要对直流电压和三相电压进行采样。该电路对电网三相电压和电机调速电压进行采样,将三相电通过分压电路、滤波电路、射随电路等环节后将电网相位变成数字信号,同时将电压幅值变成模拟量传输给中央控制器。直流母线电压采样通过电阻分压并配合差分运放来完成。
(3)电流检测。由于数控机床要求较宽的调速范围,电动机运行速度要求从几十转至几万转。因此,输出电流的频率变化范围较大,一般的电流互感器不能满足要求。本系统采用磁平衡式霍尔电流互感器对电机电流和电网电流进行检测。LAH100-P型霍尔电流互感器的测量精度和线性度较高,响应速度快,电隔离性能好,可以检测直流、交流、脉冲及各种不规则波形的电流、电压,频率范围高达100kHz。由于电机三相绕组采用Y型接法,故有三相电机电流ia+ib+ic=0,故只须检测任意两相电流便可知道三相电流值。电流采样电路如图2所示。
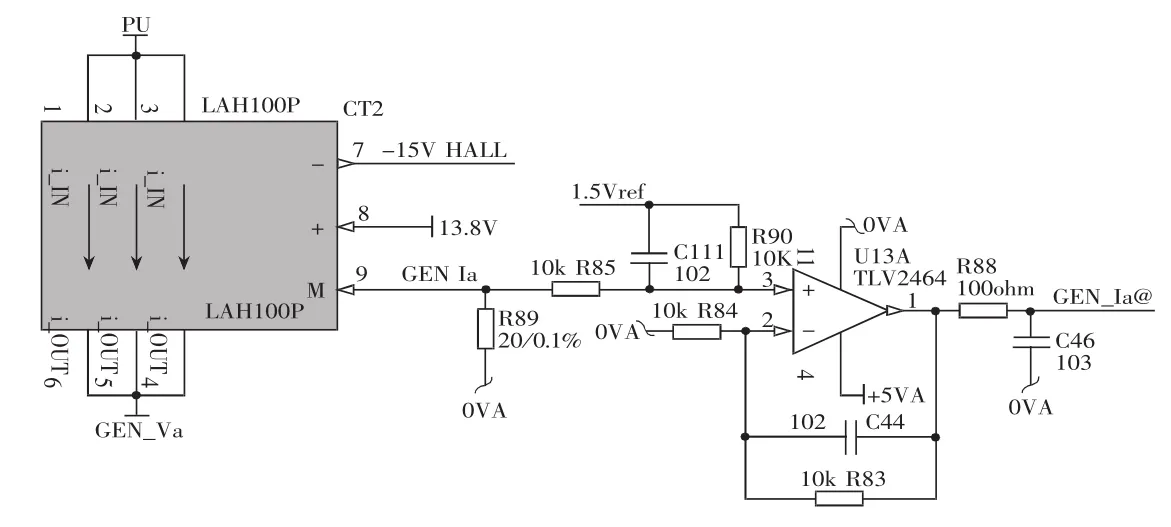
图2 电机电流采样电路
(4)温度采样。温度采样通过热电偶实现,温度信号进行调理后传递至中央控制器,中央控制器根据温度值判断发出警告或故障。
2.4驱动电路设计
F2812的EVA模块输出的三对互补PWM信号经过高速光耦HCNW 4506隔离后到达IPM的PWM输入引脚,对IPM内部的IGBT的开通与关断进行控制。驱动电路如图3所示。

图3 驱动电路
2.5监控和接口电路
系统自带监控电路,采用工业级高分辨率触摸屏作为人机界面,观测直观、操作方便,有良好的用户体验。为了方便系统调试,系统还设计了对外的接口电路,主要包括CAN和RS485接口。用户可以根据自己的需求外扩监控和操作界面。同时,为了保证紧急状态下的可靠停机,系统还设计硬件急停和保护电路。
2.6保护电路
为使系统能够安全可靠工作,采用了过流、直流过压、直流欠压、交流欠压、缺相、器件过热、上电及断电等多级保护,并有故障代码显示及记忆功能。其中过流保护不仅利用IPM智能模块本身所具有的短路过流保护功能,本文还利用F2812的功率驱动中断输入引脚PDPINTA构成保护电路。当电流、电压采样信号大于门槛值时,PDPINTA有效,从而使PWM输出引脚置为高阻态,封锁PWM信号的输出,达到保护系统的目的。
3 控制策略
针对电主轴高转速、高精度的特点,提出了一种适用于电主轴用高速永磁同步起动发电机驱动控制方法,该方法采用速度外环-电流内环的双闭环矢量控制。同时,提出了一种改进的基于反电势开环估计的转子位置和转速检测方法,实现了高速电机的无传感器矢量控制。为了解决低速启动情况下,给予反电势开环估计方法的准确度大大降低的问题,在电机启动过程中,在低速段采用基于电流控制的开环变频调速,中、高速段采用无传感器矢量控制方法。其控制系统原理框图如图4所示。实验结果验证了提出方法的有效性。
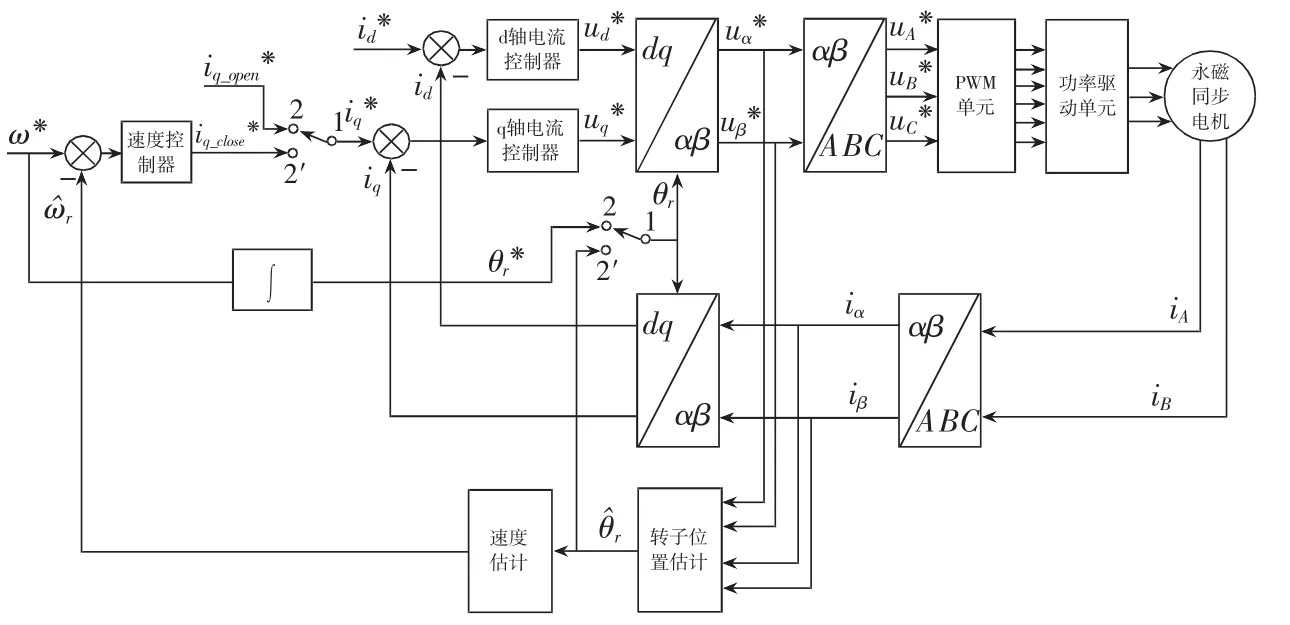
图4 电主轴驱动控制系统原理图
4 试验验证
基于上述设计完成试验样机一台,并搭建了10kW高速试验台对样机性能进行了试验验证。高速台由高速电主轴、驱动控制器、润滑系统、以及上位机组成。其中,高速电主轴采用永磁同步电机,60000rpm时,该电机的相反电势峰值约为300V;润滑系统的作用是为电主轴的前、后轴承进行润滑和散热;上位机通过kvaser监控界面与控制器通信,实现控制指令的发送和数据回传。高速台试验系统结构如图5所示。

图5 高速台试验系统结构图
基于试验系统完成了高速台电机的55000rpm转速闭环控制,转速跟随性好,稳态转速波动小于0.3%,试验波形如图6和图7所示,试验验证了驱动控制器良好的动静态性能。

图6 转速为55000rpm时电机转速跟踪曲线
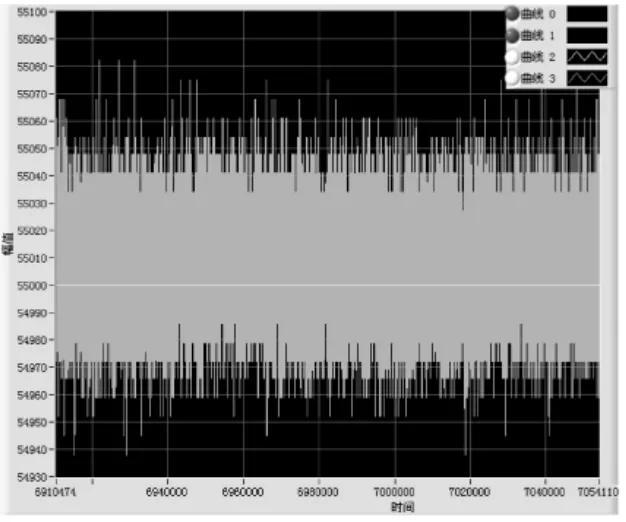
图7 转速为55000rpm时电机转速稳态波动
5 结束语
本文中介绍了一种10kW高速同步电主轴驱动控制系统,对系统的设计思路和参数进行了详细介绍,充分运用了先进的微处理器技术、电力电子变换技术、无位置传感器检测技术、电机矢量控制技术,能够使电机在整个调速范围内平滑稳定地运转,且噪声低,稳态波动小。搭建了高速电主轴试验台,对样机进行了驱动控制试验,试验结果表明该系统实现了高精度的转速跟踪控制,具有良好的动静态性能。
参考文献:
[1]顾绳谷.电机及其拖动基础[M].北京:机械工业出版社,2001.
[2]王成元,夏加宽,杨俊友等.电机现代控制技术[M].北京:机械工业出版社,2006.
[3]张兴,张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2003.
[4]Piippo,A.Hinkkanen,M.Luomi,J.Sensorless control of PMSM drives using a combination of voltage model and HF signal injection[A].Conference Record of the 2004 IEEE Industry Applications Conference[C].2004:964 -970.
[5]胡邦南,谢芳芳.永磁同步电机无传感器控制位置和速度的估算[J].机械与电子,2008,(4):41-43.
[6]Shaojing Wen,Fengxiang Wang.Sensorless direct torque control of high speed PMSM based on variable structure sliding mode[A].International Conference on Electrical Machines and Systems[C].2008:995 - 998.
[7]Kye-Lyong Kang;Jang-Mok Kim;Keun-Bae Hwang;etc.Sensorless control of PMSM in high speed range with iterative sliding mode observer[A].Nineteenth Annual IEEEApplied Power Electronics Conference and Exposition[C].2004:1111 - 1116.
[8]Shan -Mao Gu,Feng -You He,Hui Zhang.Study on Extend Kalman Filter at Low Speed in Sensorless PMSM Drives[A].2009 International Conference on Electronic Computer Technology[C].2009:311 - 316.
[9]谷善茂.永磁同步电动机无传感器控制关键技术研究[D].中国矿业大学,2009.
[10]袁泽剑,杨耕,钟彦儒.永磁同步电机无位置传感器矢量控制系统的研究[J].电气传动自动化,2000(4):21-23.
[11]蒋栋,赵争鸣.交流电机无传感器控制的新进展[J].电气传动,2008,38(4):3-7.
[12]谢清明,徐圆,郭宏,李艳明.微型燃气轮机发电站控制策略分析[J].推进技术,2012,33(1):84-88.
[13]Min -Sik Rho,and Sam -Young Kim.Development of Robust Starting System Using Sensorless Vector Drive for a Microturbine[J].IEEE Transactions on Industrial Electronics,2010,57(3):1063-1073.
[14]Kye-Lyong Kang,Jang-Mok Kim,Keun-Bae Hwang,etc.Sensorless control of PMSM in high speed range with iterative sliding mode observer[C].Nineteenth Annual IEEEAppliedPower Electronics Conference and Exposition,2004.
[15]储剑波.驱动空调压缩机的永磁同步电动机的控制技术研究[D].南京:南京航空航天大学,2010.
[16]史婷娜,王向超,夏长亮.基于RBF神经网络的永磁同步电机无位置传感器控制[J].电工电能新技术,2007,26(2):16-19.
[17]徐斌.永磁同步电机矢量控制系统研究[D].南京:南京理工大学,2014.
Design of 10kW high speed permanent magnet synchronous motor drive control system
ZHU Ming-xing1,XIE Qing-ming1,2
(1.Beijing Power Machinery Research Institute,Beijing100074,China;2.National Engineering Research Centerfor Precision Micromotor,Guiyang550008,China)
Key words:high speed permanent magnet synchronous motor;electric spindle;vector control;position sensorless control
Abstract:A 10kW high speed permanent magnet synchronous motor drive control system is presented.The system has back -to -back double PWM topology structure and has good dynamic and static performance of speed adjustment.It drives and controls the high speed spindle motor using“DSP + CPLD”as its core control unit through the sensorless algorithm.The system comprises a main circuit,a control unit,a sampling circuit,a monitoring and interface circuit,a protection circuit etc.The hardware design ideas and technical parameters are introduced in detail,and accordingly which the test prototype is designed and manufactured,and a high speed testing table is built.The prototype tests and experimental results show that the system has well dynamic and static performance.
中图分类号:TM341
文献标识码:A
文章编号:1005—7277(2016)02—0018—04
基金项目:*国家国际科技合作专项(2013DFA70650)
作者简介:
朱明星,男,河南开封人,硕士,主要研究方向为电力电子变换与控制。
谢清明,男,黑龙江人,研究员,主要研究方向为自动化与电机控制。
收稿日期:2016-02-16
