轮轨作用下液压机械加工的热误差补偿方法
2016-07-05陈运胜
陈运胜
(广州华立科技职业学院 机电与自动化学部,广州 511325)
轮轨作用下液压机械加工的热误差补偿方法
陈运胜
(广州华立科技职业学院 机电与自动化学部,广州511325)
摘要:在轮轨作用下液压机械加工过程中,轮轨液压线散热程度的非均匀分布,导致机械加工出现热误差,需要进行热误差补偿,传统方法采用热力学分层切割技术实现热误差补偿,在加工高温环境下补偿效果不好,提出一种基于多重约束热辐射控制的轮轨作用下液压机械加工的热误差补偿方法。首先进行了轮轨作用下液压机械加工的热力学环境模型构建,分析轮轨作用下液压机械加工约束状态模型,进行机械加工精度影响参量分析,采用多重约束热辐射控制方法实现机械加工过程中的误差补偿控制,提高加工性能。仿真实验进行了性能测试,结果表明,采用该方法进行轮轨作用下液压机械加工热误差补偿,机械液压加工精度得到大幅度提高,加工控制过程的收敛性能较好。
关键词:液压机械;加工;热误差补偿
随着机械工业的大力发展,机械产品的精密度逐渐提高,而今机械产品逐渐应用在集成电子制造等产业中,对机械加工的精度要求越来越高,精加工行业在制造业、汽车工业和航空航天等领域具有较大的应用前景,液压机械加工是当前机械加工的一个主要方式,在液压机械加工中,通过刨、车、铣三道工序实现对机械的加工和锻造,这一过程中,需要采用轮轨作用实现机械模具的定型处理,提高机械产品的承压能力。然而,在这一道工序中,由于轮轨作用下液压机械加工会产生非均匀的热量,导致机械加工出现热误差,轮轨液压线散热程度的非均匀分布,提高了热误差的机械加工精度的影响性能,对此,需要对轮轨作用下液压机械加工的误差进行热误差补偿,提高加工工艺和机械加工精度[1-3]。
传统方法采用热力学分层切割技术实现热误差补偿,在加工高温环境下补偿效果不好,提出一种基于多重约束热辐射控制的轮轨作用下液压机械加工的热误差补偿方法[4-6]。首先进行了轮轨作用下液压机械加工的热力学环境模型构建,分析轮轨作用下液压机械加工约束状态模型,进行机械加工精度影响参量分析,采用多重约束热辐射控制方法实现机械加工过程中的误差补偿控制,提高加工性能,仿真实验进行了性能测试,得出有效性和可行性结论,在机械加工精度改善中具有较好的应用价值。
1轮轨作用下液压机械加工的热力学环境模型及问题描述
1.1轮轨作用下液压机械加工的热力学环境流场分析
为了实现对轮轨作用下液压机械形体的高精度锻压,本文以高强度钢材料制造的轮轨作用下液压机械为例,分析轮轨作用下液压机械加工的热力学环境模型,综合考虑轮轨作用下液压机械的外形锻压残余应力的影响,对液压机械加工热力学模型进行优化控制模型的设计,提高模型的加工精度[7-8],液压机械加工过程如图1所示。
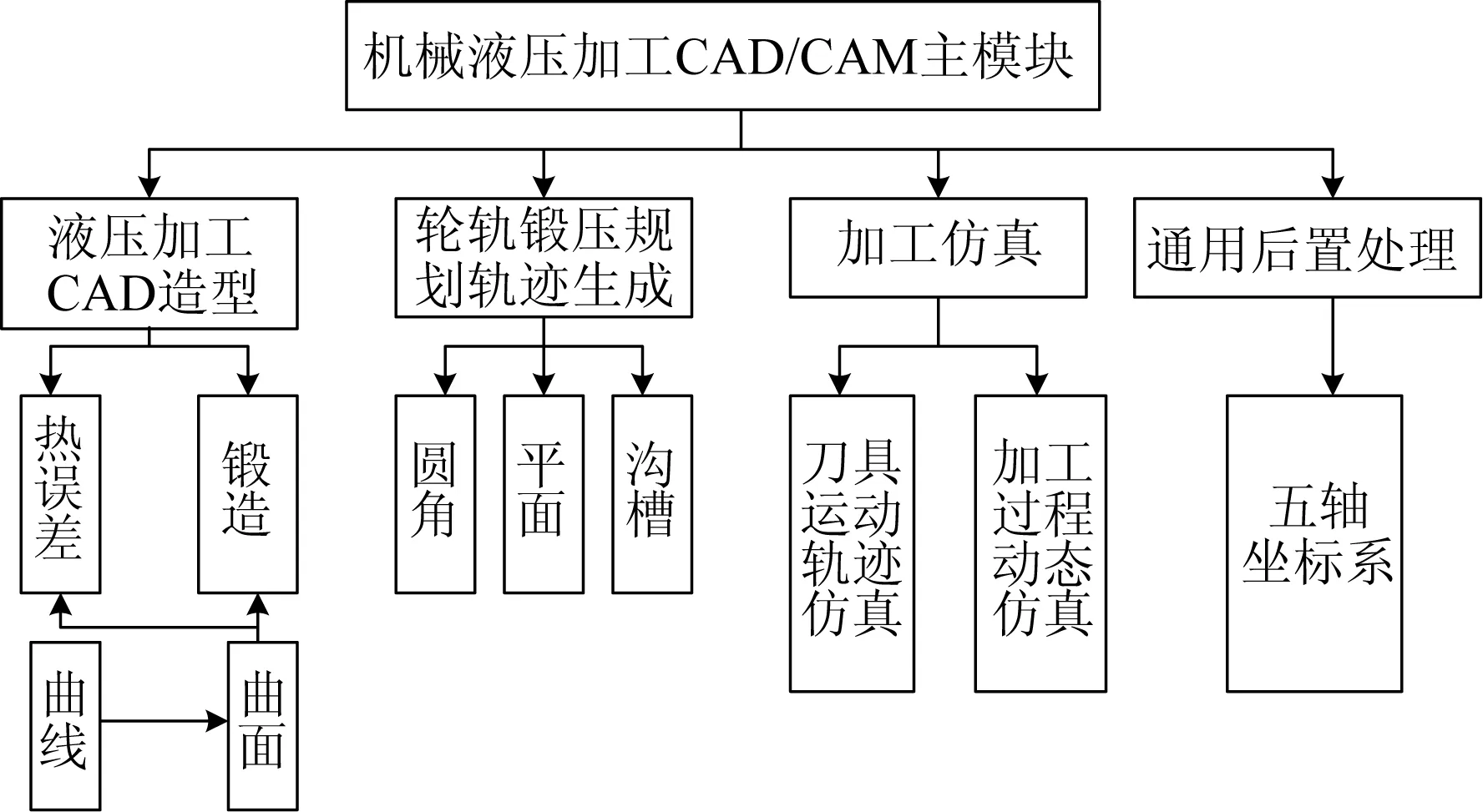
图1 液压机械加工过程
基于有限元分析方法,在轮轨作用下液压机械加工中,假设机械加工的热力学环境旋转坐标系为:
(1)
在数控系统的控制下,液压机械热力学热点分布模型具有非均匀性,确定每个锻压时间点的所有锻压热点的最小的路径为:


(2)
式中p(k(n);n1,n2)——由n1到n2沿加工轨迹k(n)的热力学补偿函数g(x,y)与f(x)之和。
结合铣刀的锥孔高度和接管的大小,分析轮轨作用下液压机械结构特征系数,得到直角坐标系下液压机械加工的热误差向量为:
(3)
式中δp——锥孔高度,mm;
Dc——接管材质的直径,mm;
pc——计算压力,MPa;
K——离心泵流场特征系数,取0.27;
[σ]t——设计温度下机械加工承受应力,MPa;
φ——矢量裁剪接头系数,取1.0。
在旋转坐标系下,分析轮轨作用下液压机械加工曲率矢量,BWP为液压机械的三轴加工中心,ω为旋转角速度,n为热误差补偿干扰项,通过网格划分方法进行机械加工的流场分析,采用计算特性较好的六面体结构模型,得到轮轨作用下液压机械加工胚体划分后的网格数量具有正交性,得到加工的热误差的几个约束条件如下:
XRL=R×θRL
(4)
XRR=R×θRR
(5)
XRL-XRR=D×δ
(6)
XRL-XRM+Lsinθp
(7)
(8)
Yp=Lcosθp
(9)
(10)
XRR+XRL=2XRM
(11)
液压机械作为最基本的锻制管件,通过CAD/CAM 系统结构设计,实现精加工,在加工过程中,需要对液压机械的多轴坐标系进行齐次坐标变换,得到液压机械的轮轨作用下热力学环境流场状态方程变化为:
(12)
通过这些方程,得到液压机械内部存在流动旋涡和压力波动的计算结果,在机械热力学流场中,为了保障机械加工具有足够的承压能力,需要进行热误差补偿控制。
1.2轮轨作用下液压机械加工的状态参量模型
在进行轮轨作用下液压机械加工的热力学环境描述的基础上,进行参数分析,构建轮轨作用下液压机械加工的参量分析模型,实现对轮轨作用下液压机械加工误差补偿控制。给出轮轨作用下液压机械加工的路径规划和精度控制的参数控制,模型的几个约束条件如下:
XRL=R×θRL
(13)
XRR=R×θRR
(14)
XRL-XRR=D×δ
(15)
XRL-XRM+Lsinθp
(16)
(17)
式中X——锻压热点的刚度退化位移;
θ——轮轨作用下机械热力场矢量竖直方向的角度;
δ——轮轨作用下液压机械绕摆杆旋转的角度;

Mp——轮轨作用下液压机械加工体的质量;
MR——轮轨作用下液压机械内外膜层的弹性模量。
对机械加工平衡点附近进行线性化处理,通过遍历每条热力学流场网格线,若网格线两端存在一对属性相同(同一层位,与同一断层相关联,同为热损耗)的无效点和有效点,可以得到:
G(C[Δ+κ(Δ)])+CT∈Dom(G)=0
(18)
(19)
当时p>2,液压机械的轴截面抗弯刚度满足:
(20)
机械材料的组成具有相异性,锻压材料表面的形状与锻压过程热量有传导关系,这种关联性表示为:
M(T)=ε(T)σT4
(21)
得到机械加工的轮轨锻压曲率的恢复约束函数为:
(22)

T——轮轨液压旋转周期变量。
通过生成层位面网格节点数据,采用矢量裁剪求出交点,形成层面的网格状表达,根据机械锻压的热量分布的定常性,设定:
(23)
得到轮轨作用下液压机械加工平衡点的热力荷载—位移恢复约束函数可以表述为:

(24)
式中xt——轮轨作用下液压机械在t时刻的锻压热量测量值;
wt——相应的xt的权值向量。
通过这些参量模型构建,进行热误差补偿。
2热误差补偿控制算法改进实现
在进行了轮轨作用下液压机械加工的热力学环境流场分析和参量模型构建的基础上,进行热误差补偿控制,在轮轨作用下液压机械加工过程中,轮轨液压线散热程度的非均匀分布,导致机械加工出现热误差,需要进行热误差补偿。传统方法采用热力学分层切割技术实现热误差补偿,在加工高温环境下补偿效果不好,为了克服传统方法的弊端,提高机械加工精度,提出一种基于多重约束热辐射控制的轮轨作用下液压机械加工的热误差补偿方法。
算法设计描述如下:轮轨作用下液压机械加工点最优路径分为轮轨作用下液压机械的向锻压局部最优路径和后向锻压最优路径,在加工过程中的热量守恒方程分别如下:
(25)
(26)
Zk={z0,z1,…,zk}
式中τij——机械加工过程中的热辐射强度;Zk——采用多重约束控制,得到热量误差测量值;xk——轮轨作用下液压机械的热量控制误差{xk,yk,θk}。
根据液压机械的刚度退化强化模量置信度,得到热误差补偿源累积滞回能项,Sm=0。热量衰减过程中不存在外部锻压力,此时,Fi=0。流体密度较小,流经液压机械时间较短,因此不考虑重力作用,ρgi=0。
轮轨作用下液压机械加工节点的累积滞回能表示为:

(27)
将此关系式代入式能量方程:
对于锻压热点,基于多重约束热辐射控制,得到拟合控制方程为:
(28)
把恒荷载作为锻压强度脆弱点加在热量误差补偿控制项上,构建轮轨作用下液压机械加工最优路径模型,得到钢结构锻压应力的湍流k-ε方程选用标准方程:
+Gk+Gb-ρε-YM+Sk
(29)
(30)
通过分析,得到液压机械加工路径规划控制规则为:
Pα(μ)=∫PQ线f(μcosα-vsinα,μsinα+vcosα)dv
(31)
在最近的点的位置坐标中,液压机械热误差补偿的无阻尼非线性控制轴方向的分量:
(32)
(33)
(34)
通过控制算法实现了对轮轨作用下液压机械加工的热误差补偿,为提高加工精度奠定基础。
3仿真实验与性能分析
为了测试本文设计的补偿方法在提高机械加工精度方面的优越性,进行仿真实验,由于液压机械设计、制造的特殊性,使得内部热力学流场与传统的机械加工有较大的差异,采用热误差补偿,提高加工精度。并通过实验进行性能测试,采用有限元法对加工工件进行热热力学流场分析实验中,参量选择:C1ε=1.44,C2ε=1.92,Cμ=0.09,σk=1.0,σε=1.3,轮轨作用下液压机械加工材料选择为L245htyjS钢胚体构件,规格φ65.2×4.3,机匣直径为23 mm,其它的液压机械加工参量设计结果见表1。

表1 液压机械加工参量设计结果
基于上述仿真环境和参量设计结果,进行轮轨作用下液压机械加工的热力学环境模型构建,分析轮轨作用下液压机械加工约束状态模型,进行机械加工精度影响参量分析,采用多重约束热辐射控制方法实现机械加工过程中的误差补偿控制,轮轨作用下液压机械加工的热力学流场有限元分析结果如图2所示。
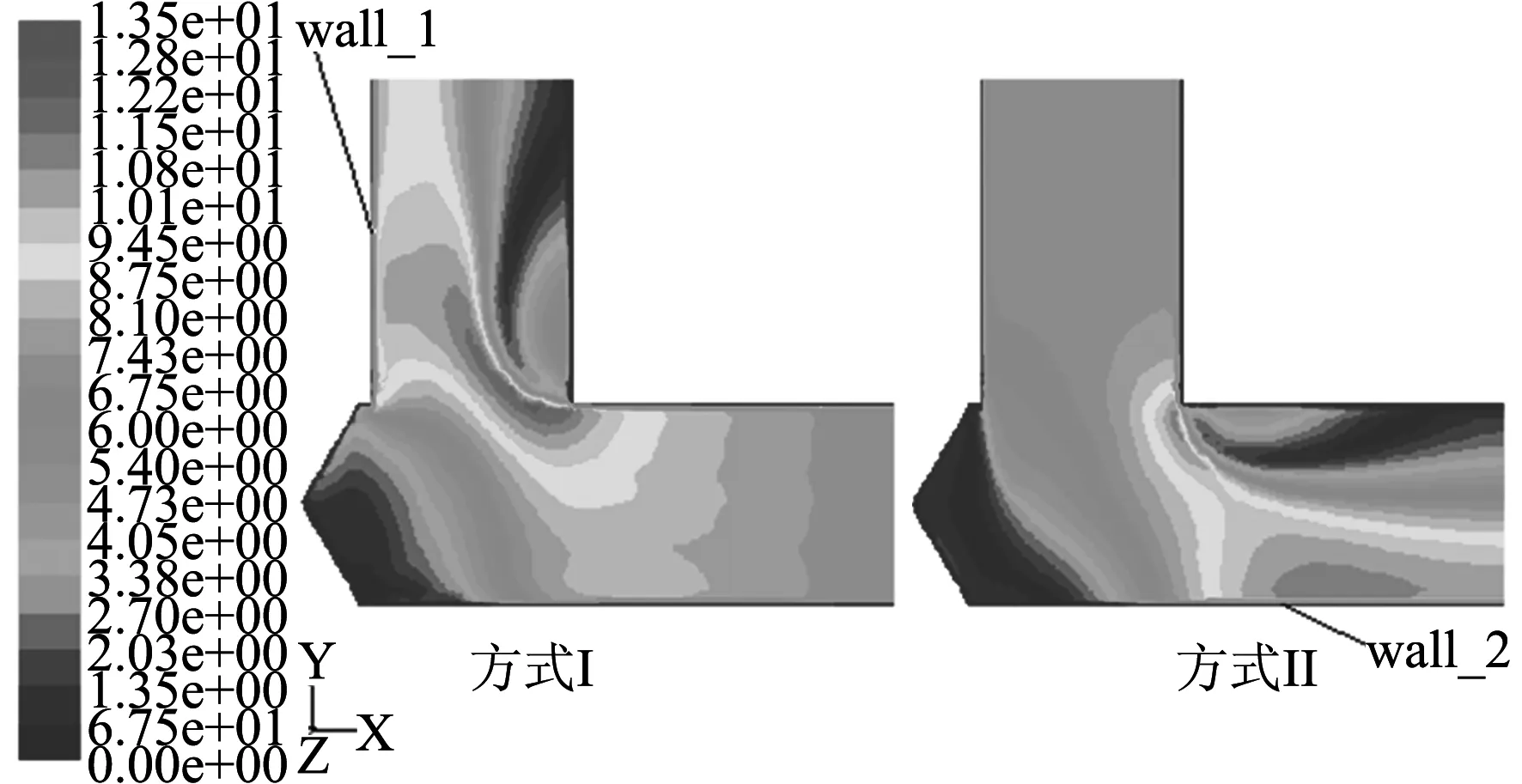
图2 轮轨作用下液压机械加工的热力学流场有限元分析结果
从图2可见,采用本文方法进行轮轨作用下液压机械加工的热力学分析,能准确反映出机械加工过程中的内部热流场环境,通过热误差补偿控制提高加工性能,为了测试该加工方法的性能,以加工精度和热误差补偿收敛曲线为测试指标,得到仿真结果如图3和图4所示。
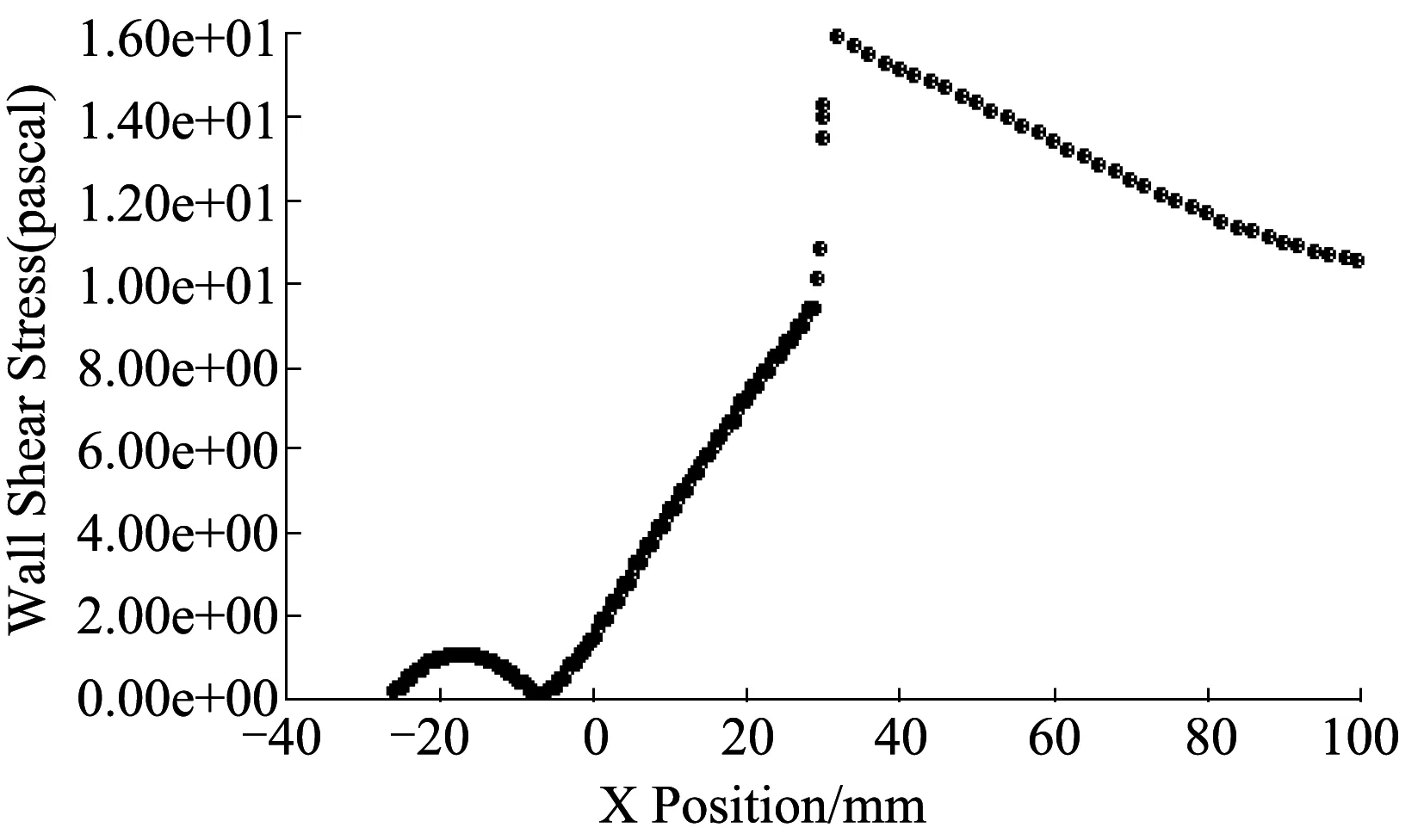
图3 液压机械加工精度分析

图4 热误差补偿收敛性能分析
从图3和图4可见,采用本文方法进行热误差补偿,液压机械加工精度得到大幅度提高,收敛性能较好。
4结语
在轮轨作用下液压机械加工过程中,轮轨液压线散热程度的非均匀分布,导致机械加工出现热误差,需要进行热误差补偿,传统方法采用热力学分层切割技术实现热误差补偿,在加工高温环境下补偿效果不好,提出一种基于多重约束热辐射控制的轮轨作用下液压机械加工的热误差补偿方法。首先进行了轮轨作用下液压机械加工的热力学环境模型构建,分析轮轨作用下液压机械加工约束状态模型,进行机械加工精度影响参量分析,采用多重约束热辐射控制方法实现机械加工过程中的误差补偿控制,提高加工性能,仿真实验进行了性能测试,展示了本文方法在改善机械加工进度,提高加工控制收敛性方面的优越性能。
参考文献:
[1]王三秀,俞立,徐建明,等. 机械臂自适应鲁棒轨迹跟踪控制[J]. 控制工程, 2015, 22(2): 241-245.
WANG San-xiu, YU Li, XU Jian-ming, et al. Adaptive robust tracking control for robotic manipulators[J]. Control Engineering of China, 2015,22(2):241-245.
[2]王磊, 刘海涛, 梁滔, 等. 低频伺服力激励下进给系统建模与动态响应分析[J]. 机械工程学报, 2015, 51(3): 80-86.
WANG Lei, LIU Hai-tao, LIANG Tao, et al. Modeling and analysis of dynamic response of servo feed system under low frequency excitation[J]. Chinese Journal of Mechanical Engineering,2015(3):80-86.
[3]闫清东, 穆洪斌, 魏巍, 等. 双循环圆液力缓速器叶形参数优化设计[J]. 兵工学报, 2015, 36(3): 385-390.
YAN Qing-dong, MU Hong-bin, WEI Wei, et al. Design optimization of blade parameters of dual torus hydraulic retarder[J]. Acta Armamentarii,2015,36(3):385-390.
[4]李鹏,马建军,李文强,等.一类不确定非线性系统的改进积分型滑模控制[J].控制与决策,2009,24(10):1463-1472.
LI Peng, MA Jian-jun, LI Wen-qiang, et al. Improved integral sliding mode control for a class of nonlinear uncertain systems[J]. Control and Decision,2009,24(10):1463-1472.
[5]邹胜宇, 刘振, 高海波,等. 基于干扰力时间积分的悬吊漂浮物随动控制方法[J]. 机器人, 2015,37(1): 1-8,16.
ZOU Sheng-yu, LIU Zhen, GAO Hai-bo, et al. Tracking control method for suspended floater based on time integral of disturbance force[J]. Robot, 2015,37(1): 1-8,16.
[6]方支剑,段善旭, 陈天锦, 等. 储能逆变器预测控制误差形成机理及其抑制策略[J]. 中国电机工程学报,2013, 33(30): 1-8.
FANG Zhi-jian, DUAN Shan-xu, CHEN Tian-jin, et al. Formation mechanism and suppression strategy of prediction control error applied in a battery energy storage inverter[J]. Proceedings of the CSEE,2013,33(30): 1-8.
[7]王伟, 廖芳芳, 陈以一. 基于微观机制的钢结构节点延性断裂预测与裂后路径分析[J].工程力学,2014,31(3):101-108.
WANG Wei, LIAO Fang-fang, CHEN Yi-yi. Ductile fracture prediction and post-fracture path tracing of steel connections based on micromechanism-based fracure criteria[J].Engineering Mechanics,2014,31(3):101-108.
[8]李学伟,赵万华,卢炳恒. 一种多轴联动加工轮廓误差的向量计算方法[J]. 现代制造工程,2014(8):50-54.
LI Xue-wei, ZHAO Wan-hua, LU Bing-heng. A new algorithm for contour error vector calculation used in multi-axis machining[J]. Modern Manufacturing Engineering,2014(8):50-54.
(本文编辑:赵艳粉)
Thermal Error Compensation Method for Hydraulic Mechanical Machining Under Wheel/Rail Action
CHEN Yun-sheng
(Guangzhou Huali Science and Technology Vocational College, Guangzhou 511325, China)
Abstract:In the process of hydraulic mechanical machining under the influence of wheel/rail, the uneven distribution of wheel/rail hydraulic line heat radiation may lead to thermal error of machining in need of thermal error compensation. The traditional method achieves the thermal error compensation by using thermodynamic stratified cutting technology, and has bad compensation effect under the high-temperature processing environment. This paper proposes a thermal error compensation method based on multi-constrained thermal radiation control. Firstly, the thermal environment model of hydraulic mechanical machining under the action of wheel/rail is built. The model of mechanical machining constraint state model is analyzed, and the error compensation control is realized. The results show that the accuracy of mechanical hydraulic machine is greatly improved.
Key words:hydraulic machinery; machining; thermal error compensation
DOI:10.11973/dlyny201601022
作者简介:陈运胜(1982),男,讲师,高级技师,主要研究领域为机械工程和自动控制工程。
中图分类号:TN219
文献标志码:A
文章编号:2095-1256(2016)01-0098-05
收稿日期:2015-10-23
