抗旋转BD接收机跟踪环路设计
2016-07-05胡铁乔刘瑞杰李瑞琴
胡铁乔,刘瑞杰,李瑞琴
(中国民航大学智能信号与图像处理重点实验室,天津 300300)
抗旋转BD接收机跟踪环路设计
胡铁乔,刘瑞杰,李瑞琴
(中国民航大学智能信号与图像处理重点实验室,天津300300)
摘要:在载体旋转情况下,接收机接收到的导航卫星信号会附加较大的多普勒频移,导致接收机跟踪性能下降,甚至失锁。针对这一问题,提出一种使接收机能正常跟踪载体旋转情况下导航卫星的设计方案。该设计在传统环路基础上加入辅助通道,实现载体旋转转速的实时估计以辅助环路跟踪。经过仿真验证,改进之后的环路能够有效降低载体旋转造成的不良影响,达到正常信号的跟踪效果。
关键词:载体旋转;导航卫星信号;跟踪环路;多普勒频移
国内对于高速旋转载体的定位导航有实际的需求,如炮弹类(旋转半径r<100 mm,30 Hz<旋转频率f<300 Hz)定位导航和战略火箭类(500 mm<旋转半径r<2 m,旋转频率f<10 Hz)定位导航。载体在旋转过程中会对导航卫星信号造成遮蔽,导致接收天线无法正常接收导航卫星信号。目前有2种方法可使接收天线正常接收导航卫星信号:①将多个接收天线均匀布置在高速旋转载体表面上,使接收天线可以正常接收卫星导航信号[1];②将环状微带天线安放在高速旋转的载体上,使接收天线可以正常接收卫星导航信号[2]。这两种方法基本能够保证卫星信号的连续接收,但天线相位中心偏离载体的旋转轴,导致载体在高速旋转情况下接收到的导航卫星信号相位存在与载体转速和相位中心偏移量有关的调制效应,这种影响会使天线接收到的导航卫星信号发生很大变化,致使接收机工作异常,发生失锁[3]。
国外已经实现智能炮弹和智能火箭弹的列装,但尚未提及具体细节。目前国内文献多为旋转信号的建模以及旋转对环路不同方面的影响,很少涉及对环路的改进措施。因此实现抗旋转北斗(BD)接收机中跟踪环路的设计具有一定的现实意义。
本文提出一种新的接收机跟踪环路,新环路在传统跟踪环路[4]的基础上新增一个辅助通道,对主通道进行二次解调,可有效降低载体旋转对接收机跟踪环路的影响,实现导航卫星信号在载体旋转下的正常跟踪。
1 高速旋转下的信号模型
1.1旋转模型的建立
高速旋转载体不但拥有质点高动态的运动特性,而且新增了高速旋转的姿态特性,给BD接收信号带来较大影响,引起BD接收机失锁[5]。为了分析这种变化对接收机处理导航卫星信号的影响,需要建立旋转模型分析接收到的导航卫星信号在高速旋转载体下的具体变化规律。
假设载体的自旋运动为旋转台运动,并以y轴作为转台的旋转轴。l1和l2分别是卫星信号入射方向在xoz和xoy平面上的投影;角度φ是卫星信号入射方向与z旋转轴的夹角;α是l1和卫星信号来向的夹角,β 是l1与z轴的夹角;θ为l2与x轴的夹角;w为转台旋转角速度,r为旋转半径,vr为切向速度,如图1所示。
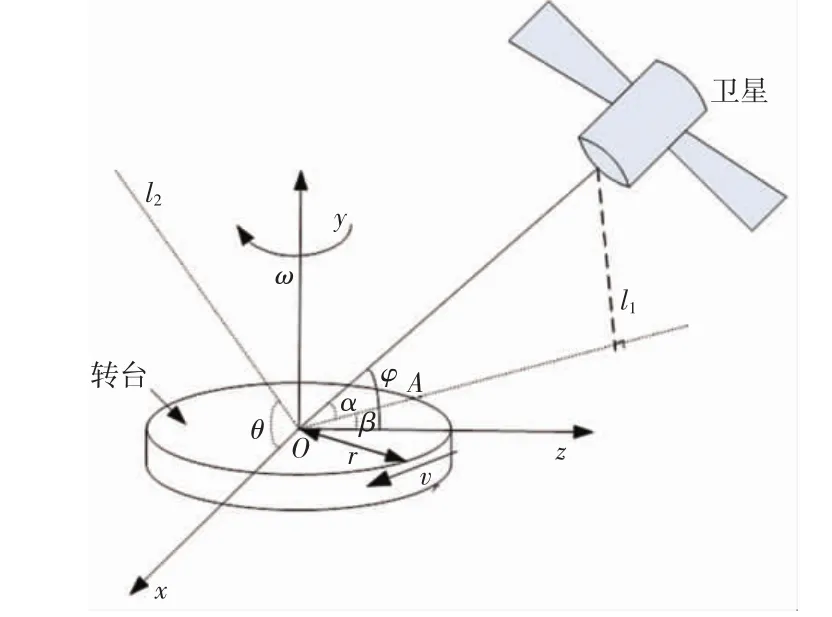
图1 模拟转台Fig.1 Simulation turntable
1.2高速旋转引起的多普勒频移和相位变化
由旋转引起的接收信号多普勒频移[6]为

其中:vr为天线绕旋转轴运动的切向速度;f为信号频率,c为光速。假设卫星不运动,且根据几何关系可得载体旋转带来的接收机和卫星之间的多普勒[7]为

其中:fr是高速旋转载体的旋转频率;fBD是BD卫星信号的载波频率;fCA是BD卫星测距码频率。
载波相位变化为

其中:△d为相对位置变化;λ为BD卫星信号波长。
利用几何投影关系,得到天线相位中心和卫星之间的相对位置变化为

最终引起的相位变化为

通过上述分析可以看出,高速旋转载体会带来附加的多普勒频移和载波相位变化[8],且其都随时间t呈周期性正弦变化,正弦频率等于高速旋转载体的旋转频率。
在实际生活中,高速旋转载体通常在一段时间内飞行方向较为稳定,因此卫星信号的入射方向在一定程度上是固定的,即α、β可以是不变的。本文设α= 0°、β= 45°,既可模拟卫星信号的入射方向,又可简化信号模型。将上述推导出的相位变化加入中频信号以模拟载体旋转条件下的导航卫星信号。
2 抗旋转跟踪环路设计
载体旋转会使接收机接收的BD信号附加有周期性正弦变化的多普勒频移。如果已知载体旋转转速,则可利用式(2)计算出附加的多普勒频移,从而消除载体旋转对接收机跟踪环路的影响。为此提出一种可消除旋转影响的环路结构,通过引入辅助通道载波鉴相结果来获取载体旋转的转速[9],利用辅助通道获取的转速信息对主通道进行二次解调,消除载体旋转对导航卫星信号附加的周期性正弦变化的多普勒频移,以改善在载体旋转情况下接收机对接收到的导航卫星信号的解算能力[10]。
2.1载体旋转参数估计
利用旋转频率可消除载体旋转的影响,因此本节主要对旋转频率进行估计。设计如下高动态场景(V = 1 000 m/s,加速度= 1 g,加加速度= 1 g/s),旋转半径r = 30 mm且固定不变,旋转频率fr变化如表1所示,载噪比C/NO = 46 dB。测试不同旋转频率对原有高动态环路的影响。

表1 旋转频率对环路跟踪影响的测试Tab.1 Influence test of high speed rotation ω to loop tracking
其中:OK表示捕获、牵引、跟踪和定位解算都正常,FAIL表示捕获正常,牵引正常,跟踪不正常。由测试结果可知,旋转频率fr≤60 Hz时,接收机可以正常捕获、跟踪和定位,当旋转频率fr大于80 Hz时,跟踪环路跟踪失锁,导致定位解算无法进行。
对旋转频率为200 Hz与没有旋转情形下的载波鉴相曲线进行比较,如图2所示。从图中可以看出,载体旋转情况下的载波鉴相在原有鉴相基础上调制有周期性正弦信号,频率等于旋转频率。由此可见,原有高动态环路可测出载体旋转转速且与仿真设置的旋转频率相一致。
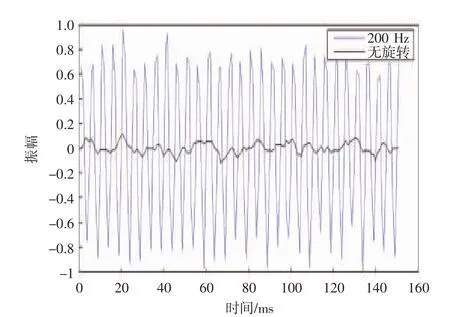
图2 载体旋转与不旋转下载波鉴相曲线的比较Fig.2 Comparison of carrier phase curves under rotation and non-rotation
2.2环路结构调整
为实现载波相位正弦调制的实时估计和对消,每颗卫星使用2个通道(主通道和辅助通道)进行跟踪,辅助通道进行载体旋转造成载波相位正弦调制的实时测量,将实时测量的相位值反馈给主通道进行实时调相,实现相位的实时对消。为保证辅助通道相位与主通道一致,主辅通道跟踪环路的锁相环(phase-locked loop,PLL)、锁频环(frequency-locked loop,FLL)和延迟锁相环(delay-locked loop,DLL)的参数保持一致。辅助通道状态完全同步于主通道状态,辅助通道不进行比特(BIT)同步测量和载噪比C/NO的计算,如图3所示。
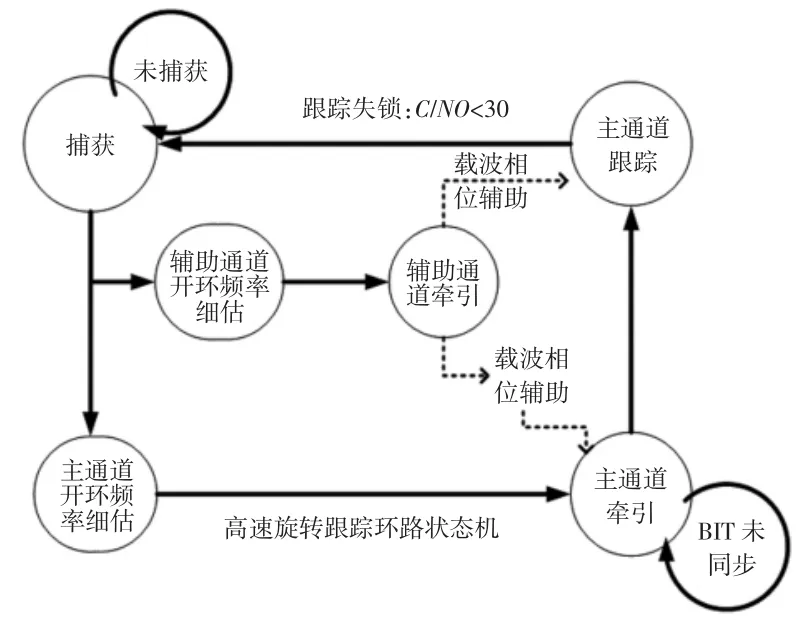
图3 环路结构调整示意图Fig.3 Schematic diagram of loop structure adjustment
原来12通道的接收机,改进之后要扩展为24个通道,每个主通道附加1个辅助通道来消除载体旋转带来的周期性正弦变化的多普勒。
2.3主通道I/Q二次解调框图
环路主通道I/Q二次解调计算公式为


其中:i_ prompt和q_ prompt为主通道即时支路相关器输出的1 ms相干积分值,phaseErr为辅助通道载波鉴相结果,SPR和SPI为二次解调后的结果,P_A_I为辅助通道即时支路,P_A_Q为相关器输出的1 ms相干积分值,最终由其来参与定位及解算,如图4所示。
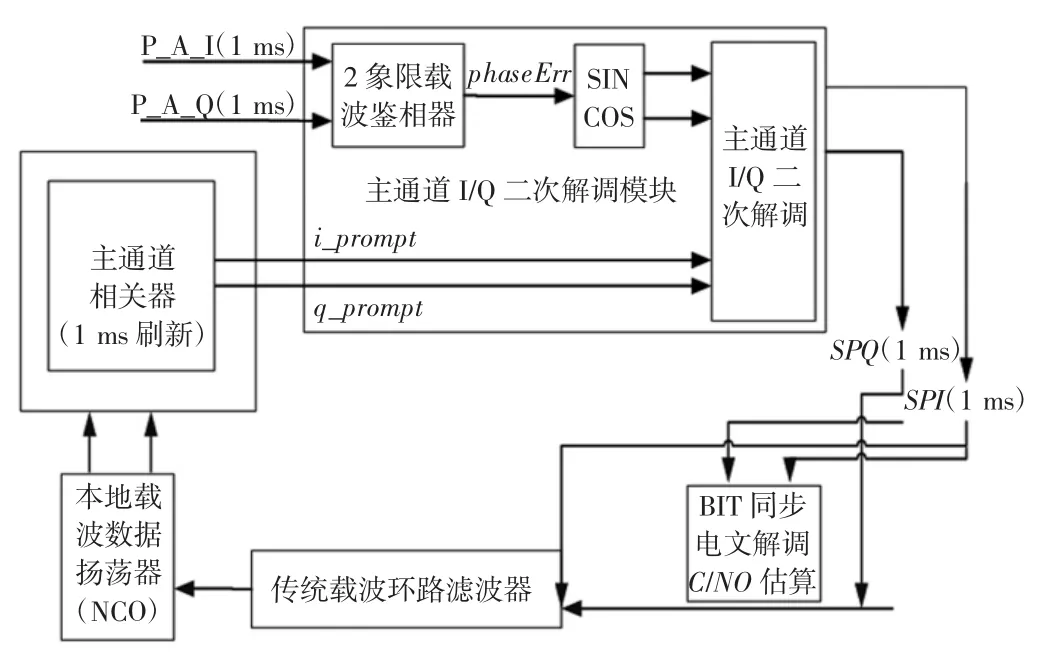
图4 抗旋转跟踪环路主通道I/Q二次解调框图Fig.4 Anti-rotation tracking loop demodulator block diagram of main channel I/Q
3 抗旋转二次解调跟踪环路性能验证
通过北斗二代B3频点(BD2-B3)模拟器和BD2-B3软件接收机仿真验证抗旋转BD接收机跟踪环路的性能。
3.1仿真设置
在软件仿真平台中,由BD2-B3模拟器生成在载体旋转情况下接收机接收到的导航卫星信号,参数配置如表2所示。将模拟生成的导航卫星信号送入BD2-B3软件接收机中进行解算,观察环路改进前后接收机的跟踪性能,如表3所示。

表2 BD2-B3模拟器参数配置Tab.2 BD2-B3 simulator configuration parameters

表3 BD2-B3接收机参数配置Tab.3 Parameter configuration of BD2-B3 receiver
3.2结果验证
传统环路与改进环路对1号(PRN = 1)卫星多普勒跟踪结果的对比如图5所示。可以看出,传统环路跟踪的载波多普勒约为1 970 Hz,并附加有周期性正弦变化的多普勒,而环路改进之后能够明显消除由旋转带来的周期性正弦变化的多普勒。

图5 传统环路与改进环路多普勒跟踪结果对比Fig.5 Doppler tracking results comparison of traditional loop and improved loop
传统环路与改进环路即时支路相关器输出I/Q结果的对比,如图6所示。可以看出传统环路即时支路相关器I/Q解算没有分开,导致接收机无法正常进入BIT同步和帧同步;改进环路即时支路相关器I路的相关积分值有一定的改善效果,Q路相关积分值有很明显的改善效果,说明改进环路能够正常跟踪载体旋转情况下的导航卫星信号。

图6 传统环路与改进环路即时支路相关器I/Q输出结果对比Fig.6 Real-time branch correlator I/Q output comparison of traditional loop and improved loop
4 结语
针对载体旋转情况下,接收机接收到的导航卫星信号附加有较大的周期性正弦变化的多普勒,导致接收机无法正常跟踪卫星的问题,提出一种新的跟踪环路设计方案。该方案在传统跟踪环路结构基础上增加一个辅助通道实时测量载体旋转转速,利用辅助通道获取的转速信息对主通道进行二次解调,以改善在载体旋转情况下接收机对接收到的导航卫星信号的解算能力。通过软件仿真结果表明,新的环路能够有效降低载体旋转带来的不良影响,达到了预期效果。
参考文献:
[1]GAMBLEAE,JENKINGPN.Lowcostguidanceforthemultiplelaunch rocket system(MLRS)artillery rocket[J]. Aerospace and Electronic Systems Magazine,IEEE,2001,16(1):33-39.
[2]刘建妥.旋转炮弹的微带天线仿真设计[D].南京:南京理工大学,2008.
[3]王猛.旋转载体单天线GPS接收信号分析与模拟[D].北京:北京理工大学,2008.
[4]陈斌杰,陈敏锋.高动态下GPS信号的捕获和跟踪技术研究[J].现代电子技术,2006(3):13-15.
[5]李耀军,张江华,费涛,等.基于单天线GPS载波幅度的旋转载体滚转角测量[J].火控雷达技术,2014,43(3):6-11,16.
[6]ELLIOTT D K,CHRISTOPHER J H. Understanding GPS Principles and Applications[M]. 2nd Ed. Boston,MA:Artech House,2006.
[7]蓝一帆,郭承军,曹建蜀.导弹自旋条件下GPS信号跟踪环路设计[J].科学技术与工程,2014,14(9):69-72.
[8]申强,王猛,李东光.旋转条件GPS接收信号频率和相位变化分析[J].北京理工大学学报,2009,29(1):35-37.
[9]陈跃鹏,李东光,杨士义. MIMU辅助旋转弹丸GPS接收机跟踪环路设计[J].中北大学学报(自然科学版),2010,31(2):173-177.
[10]于海亮,李强,罗海英,等.旋转状态下的GPS信号跟踪性能[J].中国惯性技术学报,2009,17(6):723-727.
(责任编辑:党亚茹)
Tracking loop design of anti-rotation BD receiver
HU Tieqiao,LIU Ruijie,LI Ruiqin
(Intelligent Signal and Image Processing Key Lab of Tianjin,CAUC,Tianjin 300300,China)
Abstract:In the case of carrier rotation,the navigation satellite signal received by receiver will have additional lager Doppler frequency shift,resulting in a decline in the receiver tracking performance and even failure. In order to solve this problem,a scheme is proposed to help the receiver track navigation satellite normally with rotating carrier. Based on traditional loop,the adding of auxiliary channel realizes real-time estimation of rotating speed to assist loop tracking. Simulation proves that the improved loop can effectively reduce the adverse effects caused by carrier rotation and achieve normal signal tracking.
Key words:carrier rotation;navigation satellite signal;tracking loop;doppler frequency shift
中图分类号:TN967.1;V249
文献标志码:A
文章编号:1674-5590(2016)02-0015-04
收稿日期:2015-09-16;修回日期:2015-10-21
基金项目:国家自然科学基金项目(61271404,61471363);中央高校基本科研业务费专项(3122014D008)
作者简介:胡铁乔(1970—),男,河南洛阳人,副教授,硕士,研究方向为自适应信号处理、阵列信号处理、硬件系统的设计与实现.