智能家居机器人仿真教学平台的研究与实现
2016-06-30黄亚辉石英春湖南信息职业技术学院电子工程系湖南长沙410200
熊 英 黄亚辉 石英春湖南信息职业技术学院电子工程系 湖南长沙 410200
智能家居机器人仿真教学平台的研究与实现
熊 英 黄亚辉 石英春
湖南信息职业技术学院电子工程系 湖南长沙 410200
摘 要:经过充分调研,根据我国大多数智能家居机器人的特点设计了典型的家居机器人模型,开发成功了智能家居机器人仿真教学培训系统,为学生提供了一个接近于真实环境更有利于教学培训的平台。该平台应用之后取得了优异的成绩。
关键词:智能家居机器人;仿真;教学平台
智能家居机器人是服务机器人的一种,服务机器人是一种半自主或者全自动的移动机器人,主要从事非生产类的活动,它能帮助人们省时省力地完成服务工作。目前,在发达国家里,智能清洁机器人已经被广泛地用于家庭、办公室、机场等室内的清扫,节省了大量的劳动力和时间[1]。国内的机器人学习,由于传统实验室的实验成本与场所的限制,存在以下不足。(1)学生不易见到真正的应用型机器人,特别是一些服务机器人的应急操作在日常生产中很少出现,而这些对学生而言恰恰是非常重要的。(2)学员动手操作机会少,更谈不上操作练习,学生难于学会操作技巧。(3)学员看不到操作与相关参数的内在关系,难于建立理论与实践之间的联系。仿真教学能有效地弥补以上不足[1,2]。
组建智能家居机器人创新性教学平台能为高等院校的学生和教师提供一个综合的专业机器人教育和研究平台,能通过系统的方法对实践教学内容、方法和手段进行创新,进而引导学生进行单片机和微控制器、数字电子和模拟电子、数字逻辑、检测技术与传感器等课程进行融会和贯通。鼓励学生利用学科交叉的知识,打破孤立的知识体系,不同专业学生组成团队,进行多学科综合性的创新性设计和验证。
目前,计算机和网络技术广泛普及,为仿真教学提供了良好的条件。经过充分的调研,根据我国大多智能家居机器人的特点设计了典型的机器人模型,成功开发了智能家居机器人仿真教学培训系统,为学生提供了一个接近于现场更有利于教学培训的平台。
1 系统的构成及原理
从机器的系统来看,分为嵌入式控制器系统、单片机控制系统、电机驱动系统、传感器检测系统、嵌入式控制系列主要负责大量运算和图像视觉处理的支持和显示,相当于一个微型计算机控制器。

图1 机器人控制系统
单片机控制系统比较底层,主要用来控制传感器和电机驱动电路,驱动电机电路主要用来控制机器人运动,传感器系统用来感知当前环境,这是一个完善的智能闭合控制,可以增加更多的传感器,使机器人更加智能化,从服务机器人的功能角度来看,本服务机器人模拟了人的机器人的视觉系统、机器人触觉系统、机器人听觉系统、还具有较强的人机交互。
2 硬件控制系统的设计
智能家居机器人控制系统的硬件电路由以下基本单元组成[2]。

图2 智能家居机器人控制系统组成
电源电路:本控制板的电源系统比较简洁,直接采用外部电源6 V~9 V供电,通过了降压芯片产生整个系统所需的两种电压:3.3 V,5 V电压,如图3所示。

图3 控制系统板电源电路
底层控制电路:底层控制电路由嵌入式控制电路部分和底层驱动控制部分组成,嵌入式控制电路部分主要负责跑操作系统和驱动液晶显示和嵌入式摄像头等USB设备,相当于一个微型的计算机系统,底层驱动电路部分主要是由单片机控制器和传感器电路组成,起到传感器的控制和逻辑判断和驱动电机转动等功能,底层控制板电路如图4所示。
传感器电路:传感器电路主要包括了RIR人体热释电模块接口电路,IR Control红外测距模块,语音识别模块电路,超声波模块电路接口电路,这里包括的传感器都为成熟的模块(如图5所示)。
本次用于仿真教学的智能家居机器人,其控制系统硬件主板外观如图6所示[3]。

图4 底层控制系统板电路
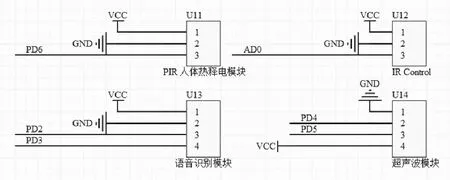
图5 传感器接口电路

图6 智能家居机器人硬件主板外观
3 应用软件的开发
智能家居机器嵌入式软件系统是基于Raspbian Linux发行版本开发的,用户可以在登录后手动启动桌面环境。

图7 Raspbian启动示意图
当用户成功登录后,看到的仍然是无趣的命令提示符,输入指令可以启动Linux桌面环境,稍后控制系统板的显示屏上会展现一个具有美丽背景的桌面,如图8所示。
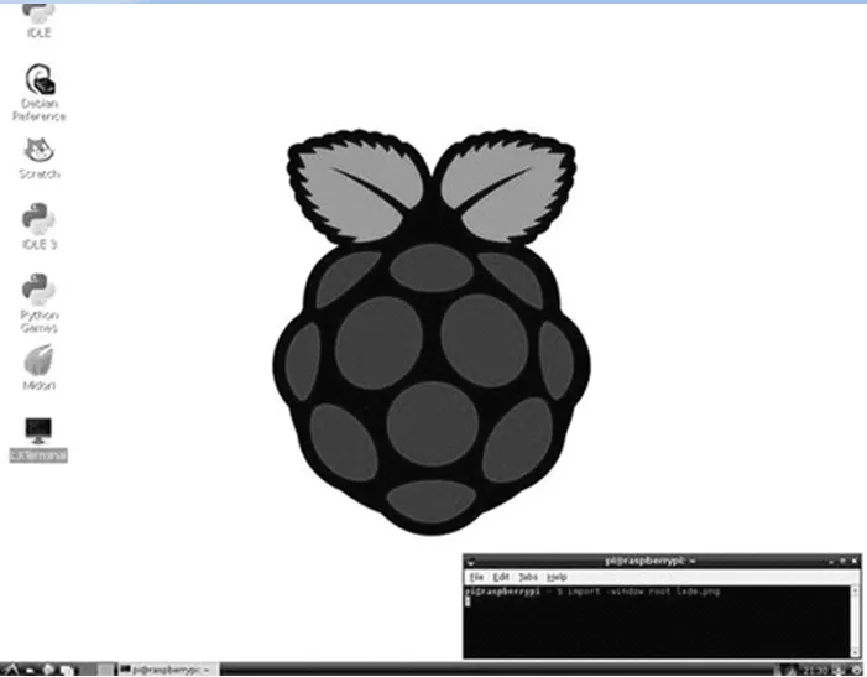
图8 智能控制系统显示桌面
本控制系统采用python语言作为软件的开发语言,其代码非常清晰,安装和设置运行环境容易。尤其可以在网络上一起分享代码或共同分析、解决问题,方便学生学习。
以语音识别模块与机器人动作控制程序设计为例,基于语音识别模块控制机器人动作时,首先需要通过语音配置上位机,把需要的关键字让语音识别模块能够认识。一旦发出匹配的语音,语音识别模块就会通过串口发出4个字节的匹配地址命令,底层控制板接收到4个字节的匹配信息后,来做判断,该执行什么样的动作。
4 交互模块整体软硬件调试结果
由于智能家居机器人系统较为庞大,且各个模块都是一个独立的系统,它们之间通过总线方式进行通讯,这样要完成的硬件和软件设计环节就比较多,如底层控制板、语音识别模块以及嵌入式控制板需要硬件设计和下载程序,在对某一个模块实施调试时,可以断开其他模块,从而避免操作不当损坏了其他的模块[4,5]。
本文以测试系统的传感器为例。本系统通过无线蓝牙键盘模块,输入数字区键1~9,来进行功能的测试,标配的控制器中无线键盘鼠标是一体的,由USB接口的接收器接收[6]。软件调试界面如图9所示。

图9 嵌入式控制板中传感器测试界面
底层控制板程序流程图如图10所示 。
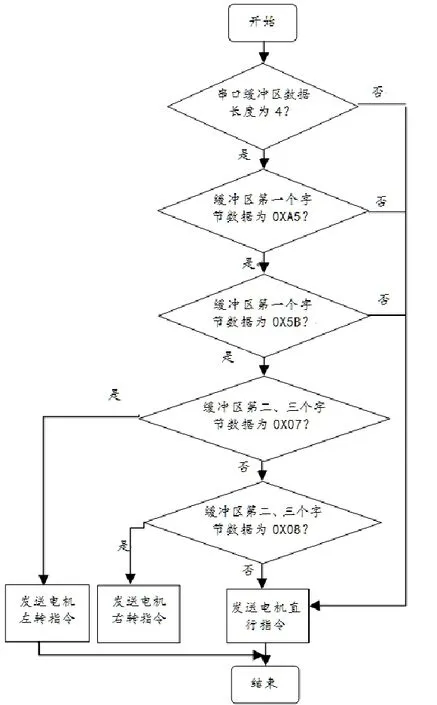
图10 底层控制板程序流程图
通过了多个模块的集体测试,对于传感器的测试数据,是最基本的操作,如果还要搭建复杂的功能,那么对应传感器的思路算法要更优越,不然还会出现互相干扰,或者一个传感器不稳定影响整个系统。特别注意,在编写程序和调试的时,要保证接线的正确性和不松动。因此可以先单个传感器进行测试,然后逐步联合起来,从而更加容易发现问题来自哪个环节[7,8]。
嵌入式控制板程序流程图如图11所示。

图11 嵌入式控制板程序流程图
5 应用效果
机器人仿真教学培训系统建成以来,已经多次应用于我校的本科教学以及对外校的教学服务,还承担了继续教育学院的部分培训工作。根据每次使用中所发现的问题进行了相应的改进,并且开发了新的功能。在实验课上,学生们一致认为该系统真实、直观地反映了现场生产作业的实质内容。
以此仿真教学平台为依托,学院历届参加的机器人类竞赛项目获得省二等奖以上110余项,取得了优异成绩,逐渐形成了以机器人竞赛为代表的品牌竞赛项目。2007-2010年,中国机器人大赛暨RoboCup中国公开赛、中国水中机器人大赛、全国职业院校技能竞赛机器人技术、黄炎培职业教育奖创业大赛等项目,一、二等奖54人次。2011年4月,湖南省职业院校技能竞赛机器人技术应用项目,获省一、二名,获奖学生6人次。2011年6月,全国职业院校技能竞赛机器人技术应用项目,获全国一等奖第一名和三等奖,获奖学生6人次。2012年4月,湖南省职业院校技能竞赛机器人技术应用项目,获省一、二名,获奖学生6人次。2012年6月,全国职业院校技能竞赛机器人技术应用项目,获全国二等奖2项,获奖学生6人次。2012年11月,中国教育机器人大赛,获全国特等奖1项,一等奖2项,获奖学生9人次。2013年11月,中国教育机器人大赛,获全国特等奖2项,一等奖2项,获奖学生12人次。2014 年11月,中国教育机器人大赛,获全国特等奖3项,二等奖1项,获奖学生12人次。
此外学院还承办中国教育机器人教练员培训(中高职)和国家级教师下企业培训(高职)。2013年8月10~21日,承办中国教育机器人竞赛湖南地区第一届教练员培训;2013年11月10~20日,承办中国教育机器人竞赛湖南地区第二届教练员培训。2014年7月14日至8月30日,承办国家教育部职业院校骨干教师国家级培训项目——高职电子信息工程技术专业教师下企业培训项目(工业机器人技术应用),合作企业:长沙长泰机器人公司、湖南科瑞特科技股份有限公司[9,10]。
6 结束语
家居机器人仿真教学系统受到了教师和学生的普遍欢迎,近年来这套仿真教学系统已成功向多家高校转让。随着科学技术的进步,仿真教学的手段也将不断地发展,它的应用领域将愈加广泛,它的安全、高效的优势将在机器人行业中发挥重大的作用。
参考文献
[1] 田国会.家庭服务机器人智能空间技术研究与进展[J].山东大学学报:工学版,2007,37(5):53-58.
[2] 周盛荣.智能家庭清扫机器人的研究[D].哈尔滨:哈尔滨工业大学,2006.
[3] 田琦,张国良.全方位移动机器人模糊PID运动控制研究[J].现代电子技术,2009,5(292):131-133.
[4] 韩珩.基于AT89C51的智能清洁机器人设计[J].甘肃科技兵工自动化,2008,24(5): 15-16.
[5] Choi S K, Yuh J. A virtual collaborative world simulator for underwater robots using multi-dimensional, synthetic environment[C]. Proceedings of the 2001 IEEE International Conference on Robotics & Automation. Seoul, 2001: 926-931.
[6] Komerska R J, Chappell S G. A simulation environment for testing and evaluating multiple cooperating solar-powered AUVs[C]// Proceedings of the MTS/IEEE Oceans 2006 Conference. Boston, 2006: 1-6.
[7] 邵金燕.多机器人协作控制研究[D].北京:北京大学工学院,2007.
[8] 宋伟刚.机器人学:运动学、动力学与控制[M].科学出版社.
[9] 陈鹏慧.微软仿真组轮式微型机器人仿真比赛平台探讨[J].机器人技术与应用,2010(8):28,31.
[10] 徐红丽,许真珍, 封锡盛.基于局域网的多水下机器人仿真系统设计与实现[J].机器人,2005,27(5):423-425,440.
Design and Implementation of the Simulation Teaching System of Smart Home Robot
Xiong Ying, Huang Yahui, Shi Yingchun
Departiment of Engineering , Hunan College of Information, Changsha, 410200, China
Abstract:After full investigation and according to the characteristics of most of the smart home robots , a typical home robot model was designed and then a simulation training system was developed in teaching, which was close to the real working condition and provided students with a practice platform.
Key words:smart home robot; simulation; training system
收稿日期:2015-10-19
作者简介:熊英,硕士,助教。黄亚辉,本科,助教。
基金项目:2014年度湖南省高等学校科学研究项目“语音交互式智能家居清洁机器人仿真平台的研究”(编号:14C0827)。
