油田回注水余氯模糊系统
2016-06-29周凤星万兴兵
龙 盼 周凤星 万兴兵
(武汉科技大学信息科学与工程学院,湖北 武汉 430081)
油田回注水余氯模糊系统
龙盼周凤星万兴兵
(武汉科技大学信息科学与工程学院,湖北 武汉430081)
摘要:针对油田回注水系统中余氯控制对象具有非线性、大时滞和时变性等特点,以及难以建立数学模型的现状,介绍了一种基于自适应Smith的模糊PID控制方案。利用模糊控制,实现对PID 3个参数的自整定;采用Smith预估器对加氯控制系统的滞后进行补偿,结合模型参考自适应算法,弥补Smith控制器对模型的依赖性。仿真结果表明,该方案能有效提高余氯的控制效果,增强了系统的鲁棒性及适应参数变化的能力。
关键词:余氯控制自适应控制模糊控制PID控制Smith预估器油田污水处理
0引言
从目前国内大部分油田的污水处理及应用情况来看,污水回注地层是解决生产过程中污水的最佳方法。余氯是反映油田回注水水质状况的重要指标,过高或过低都会直接影响油田污水的回注过程。为保证回注过程正常进行,需对出口处余氯量进行定值控制。出口处余氯量的优化控制对提高回注水水质、减缓管道腐蚀速度和减少环境污染具有重要的意义[1]。
通过对某油田污水处理系统的分析,为保证回注水余氯量满足国家标准,本文提出了一种自适应Smith预估模糊PID控制方案。该方案采用Smith预估控制器,弥补回注水余氯控制系统的滞后,采用模型参考自适应调整参考模型适应模型失配的情况,并运用模糊控制器对PID的比例、积分、微分参数进行修正。仿真结果表明:该方案提高了余氯量的控制精度,缩短了上升及峰值时间,降低了超调量。
1控制系统结构
油田污水处理过程需对联合站外输泵出口处余氯量进行定值控制。实际现场油田污水水质、pH值和温度等因素都会对出口处余氯量产生影响,而常规PID控制器对以上干扰的控制效果不佳,使出口处余氯量波动频繁,影响回注水水质。为解决上述问题,本文在常规PID控制的基础上,引入了Smith预估控制、模型参考自适应和模糊控制。
基于自适应Smith预估的余氯模糊控制系统如图1所示。图1中:γ为余氯给定值;y为余氯的测量值;μ为控制器控制量,相当于输出给加氯机阀门开度的电流值。
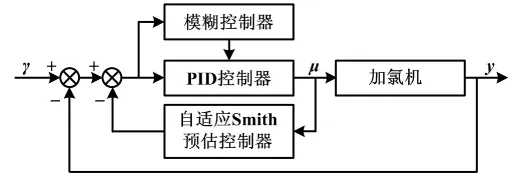
图1 油田回注水余氯控制系统结构框图
2自适应Smith模糊PID控制器
2.1模糊PID控制器
控制系统将采样得到的余氯值与设定值进行比较,得到偏差e和偏差变化率ec作为模糊控制器的输入,并以PID的3个参数修正值作为输出;根据系统的响应实时调节PID控制器,以满足不同时刻的误差e和ec对PID控制参数的需求。模糊PID控制系统框图如图2所示。
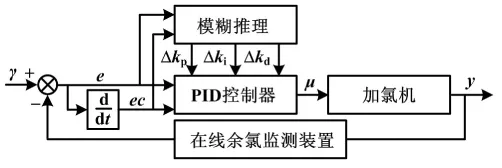
图2 模糊PID控制系统框图
(1) 输入输出量的模糊化。
选择偏差和偏差变化率ec及3个输出ΔKp、ΔKi、ΔKd对应的模糊语言变量,分别为E、EC、Kp、Ki、Kd。取模糊化论域为[-6,6],由7个语言变量组成,分别为{负大、负中、负小、零、正小、正中、正大},简记为{NB、NM、MS、ZO、PS、PM、PB}。在油田加氯系统中,应保持出口处余氯值在(0.50.12)mg/L[2],选余氯偏差的基本论域为[-0.12,0.12],ec的基本论域为[-0.02,0.02],则可得量化因子Ke=6/0.12=50,Kec=6/0.02=300。隶属函数选用三角形函数,计算方便。
(2)模糊规则和模糊推理。
针对不同的e和ec,根据操作者手动控制经验及PID参数整定原则,将模糊控制器的模糊规则总结如下[3-4]。
①当e>0且ec<0时,即余氯检测值与余氯设定值的偏差有减小的趋势。在初期阶段,为了尽快消除偏差,须加快控制量的响应速度,所以取较大的比例系数;为避免积分饱和,取较小的积分系数。当余氯检测值逐渐接近设定余氯值时,为提高系统的抗干扰性、减小在稳定值点的振荡,可适当增加微分系数。
②当e<0且ec<0时,即余氯检测值超过余氯设定值,且偏差有增大的趋势。为防止大的超调量出现,选取较大的微分系数,并适当减小比例系数、积分系数。
③当e<0且ec>0时,即余氯检测值与余氯给定值的偏差有减小的趋势。初期阶段,为了尽快消除偏差,须加快控制量的响应速度,所以取较大的比例系数和较小的微分系数,以提高系统的稳定性。当余氯检测值逐渐接近设定余氯值时,为防止系统出现大的超调,可适当增加微分系数,以减小积分系数。
④当e>0且ec>0时,即余氯检测值与余氯给定值的偏差有增大的趋势。为减小超调,取较大的微分系数。当偏差较大时,为尽快消除偏差,可适当增大积分系数与比例系数,以减小微分系数。
根据上述原则,可将其转化成模糊控制语句,如:
IFE=NBANDEC=NB,THEN ΔKp=PB,ΔKi=NB,ΔKd=PS;
IFE=NBANDEC=NS,THENΔKp=PB,ΔKi=NM,ΔKd=NS;
IFE=NBANDEC=ZO,THEN ΔKp=PB,ΔKi=NB,ΔKd=PS;
…
(3)解模糊。
2.2自适应Smith预估控制器
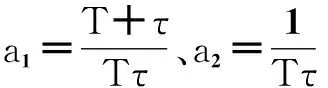
Smith预估器系统结构如图3所示。图3中:PID控制器为Gc(s),Smith预估器为Gm(s)e-τms,出口处余氯控制过程实际对象为G0(s)e-τs。
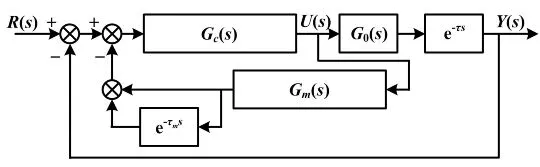
图3 Smith补偿控制系统框图
由图3推导出系统的传递函数为:

(1)
当Gm(s)=G0(s)、τ=τm时,传递函数变为:
(2)
由式(2)可知,闭环系统的特征方程中不含纯滞后因子,使系统稳定性不受时滞部分的影响。
考虑到油田污水处理过程参数的时变特性及不确定性,预估模型可能会存在偏差,而Smith预估控制器在模型匹配存在偏差的情况下会导致控制效果不佳,从而造成系统不稳定。但是,如果对预估模型不断调整,使之和实际被控对象相匹配,系统的控制效果就会得到明显的改善。故将模型参考自适应思想引入到Smith预估控制系统中,构成自适应Smith控制器。其原理是:选用Smith预估控制器为参考模型,回注水余氯对象模型为被辨识过程,通过Smith预估控制器与回注水余氯对象模型的广义误差,在线辨识回注水余氯对象模型;然后对参考模型进行调节,使参考模型的动态性能尽可能与实际过程一致[5]。系统结构框图如图4所示。
图4 余氯控制自适应Smith系统结构框图
根据模型参考自适应控制理论,目前应用较多的是李亚普诺夫稳定理论和波波夫超稳定性理论。在油田污水处理过程中,希望控制系统可以使出口处的余氯量维持在一个稳定的范围内。由李亚普诺夫稳定理论设计的控制系统具有稳定性高和抗干扰性强的优点,故选用该理论为调整控制器参数的自适应律[6-8]。
可将氯在缓冲罐中的反应看成一个惯性环节加小滞后环节[9],其传递函数为:
(3)
由泰勒一阶式可得[6]:
(4)
则余氯实际对象模型传递函数可写为:
(5)
(6)
设Smith预估模型传递函数为:
(7)
开环系统的动态方程为:
(8)
式中:r为模型输入,等效于U;e为余氯实际对象模型与Smith预估模型的广义误差。
取ψ=kv-kckm,则选取李亚普诺夫函数:
(9)
则:
(10)
由式(8)解得:
(11)
代入式(10)中,得:

(12)
(13)
则可得:
(14)
又因为:
(15)
将式(15)代入式(14),得余氯控制系统的自适应律为:
(16)
模型参考自适应控制框图如图5所示。
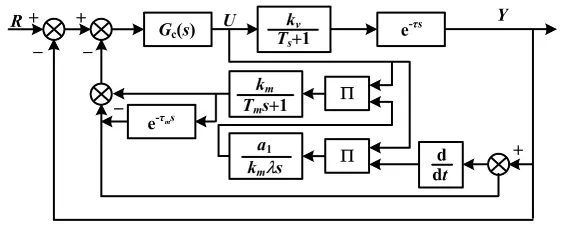
图5 模型参考自适应控制框图
3仿真分析
(17)
在Matlab中建立仿真模型,验证在参数失配的情况下,系统对象模型与Smith预估器模型的控制效果。分别设计了常规PID控制器、模糊PID控制器和自适应Smith的模糊PID控制器。当以0.5mg/L阶跃信号为输入时,3种控制系统的仿真结果如图6所示。
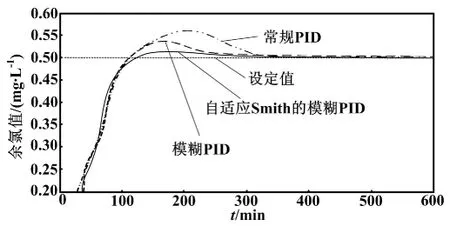
图6 对象参数改变后余氯输出曲线
比较3种控制器的超调量和调节时间:PID控制器分别为18.5%和287min;模糊PID控制器分别为12.3%和221min;自适应Smith的模糊PID控制器分别为5.5%和212min。仿真结果表明:自适应Smith的模糊PID控制器具有上升时间短、调节时间短、超调量小和控制效果好等特点。
4结束语
针对油田回注水余氯控制系统的非线性、大时滞
和时变性特点,本文提出了一种基于自适应Smith的模糊PID控制方案。该方案兼顾了模糊控制和自适应Smith预估控制的优点,既对系统的扰动有较强的适应能力,又对系统的滞后有很好的补偿,从而保证了杀菌效果、提高了回注水水质、减少了环境污染。与传统的控制方法相比,该方案在控制性能上有很大的提高,且实现方便、控制效率高,极大地降低了油田运行成本,具有广阔的推广应用前景。
参考文献
[1] 丁慧,陈文峰,栾希炜,等.油田采出水电解杀菌技术研究[C]//2003年水消毒技术国际研讨会,2003:99-103
[2] 黄强.油田采出水电解盐水杀菌技术[J].油气田地面工程,2012(11):29-30
[3] 邢健峰,纪志成.基于模糊PID的Smith预估碱液温控系统[J].自动化与仪表,2014(7):43-47
[4] 王春艳.基于Smith预估模糊PID控制的加热器温控系统[J].自动化与仪表,2012(6):49-52
[5] 周颖,宋丹丹,聂盼盼,等.模型参考自适应-Smith预估控制在发酵温度控制中的应用研究[J].河北工业大学学报,2011(5):5-10
[6] 尉颖,白珍龙.新型的Smith自适应辨识控制算法[J].自动化仪表,2010(2):31-34
[7]OTEAFYA.AStudyoftheLyapunovStabilityofanopen-loopinductionmachine[J].ControlSystemsTechnology,2010,18(6):1469-1476.
[8] 李清泉.自适应控制理论体系、设计与应用[M].北京:科学出版社,1990.
[9] 胡寿松.自动控制原理[M].北京:科学出版社,2003.
[10]王永初.滞后过程的预估与控制[M].北京:机械工业出版社,1987:7-9.
Fuzzy System of Residual Chlorine in Oilfield Reinjection Water
Abstract:Aiming at the characteristics of object in residual Chlorine control, i.e., nonlinearity, large time delay and time-varying, etc., and the difficulty to establish the model for the process of oilfield reinjection water system, a fuzzy PID control scheme based on adaptive Smith prediction is introduced.The self-tuning of three of the PID parameters are implemented by using fuzzy control; and the time lag of Chlorination control system is compensated with Smith predictor, combining with the adaptive algorithm of reference model, the dependence of Smith controller upon the model is remedied.The simulation results show that the control effect of residual Chlorine can be effectively improved by this control scheme, the robustness and the capability of the system to adapt the changes in the parameters are enhanced.
Keywords:Residual Chlorine controlAdaptive controlFuzzy controlPID controlSmith predictorOil fieldSewage disposal
中图分类号:TH86;TP273
文献标志码:A
DOI:10.16086/j.cnki.issn 1000-0380.201606019
国家自然科学基金资助项目(编号:61174106);
武汉科技大学大学生科技创新基金资助项目(编号:14ZRC149)。
修改稿收到日期:2015-09-02。
第一作者龙盼(1991-),女,现为武汉科技大学控制科学与工程专业在读硕士研究生;主要从事检测技术与自动化装置方向的研究。
