谭思欣平衡木交换腿结环跳三维虚拟动作的运动学分析
2016-06-27熊兰静王庆跃周继和
熊兰静,王庆跃,周继和*
(1.成都体育学院 医学系,成都 610041;2.成都工业学院 学报编辑部,成都 611730)
谭思欣平衡木交换腿结环跳三维虚拟动作的运动学分析
熊兰静1,王庆跃2,周继和1*
(1.成都体育学院医学系,成都610041;2.成都工业学院学报编辑部,成都611730)
摘要:通过三维拍摄2013年全运会体操平衡木冠军谭思欣的比赛录像,对谭思欣交换腿结环跳动作进行三维解析,获得该技术动作系统运动学参数;利用沉浸式三维虚拟现实技术对获得的运动学数据进行动作重建,经360°旋转后观察动作的三维动画,再进行运动学分析,找出谭思欣交换腿结环跳技术动作完成的优缺点。结果显示,谭思欣的动作技术比较标准、合理。
关键词:交换腿结环跳;运动学;虚拟现实动作
1研究目的
根据《2013—2016女子体操评分规则(平衡木动作表)》规定,平衡木的跳步动作最高难度为E组。交换腿结环跳作为跳步动作最高难度E组的3个技术动作之一,完成难度大,技术要求高,艺术欣赏性高,具备较高的研究价值[1]。
查阅文献资料发现,当前国内学者对平衡木技术动作的探究多集中在上法、空翻和下法这3个方面,对于跳步动作的研究鲜有涉及[2]。因此,本研究对谭思欣的交换腿结环跳动作进行运动学解析,运用沉浸式三维虚拟现实技术再现的方法,建立三维人体运动模型,将运动员的跳步动作数据调入虚拟现实系统进行演示,得到该动作的三维立体再现动画,对动作进行精确诊断和分析,为运动员纠错和教练员指导技术训练提供参考。
2研究对象及方法
2.1研究对象
以2013年全运会平衡木冠军谭思欣为研究对象,其基本情况如表1所示。

表1 研究对象基本情况
2.2研究方法
2.2.1文献资料法
查阅国际体操联合会编写的《2013—2016女子体操评分规则(平衡木动作表)》;通过查阅交换腿结环跳的相关文献,对交换腿结环跳各阶段的技术特点以及相应的运动学参数进行收集和分析。
2.2.2沉浸式三维虚拟现实技术再建模拟运动技术
在2013年全国体育运动会体操比赛中放置2台JVC9800摄像机分别位于平衡木的2个斜侧面,主光轴夹角约为80°。拍摄频率为50 Hz,摄像机高1.25 m,两机对平衡木比赛全过程进行同步三维拍摄,如图1所示。

图1 摄像机位置示意
选取谭思欣交换腿结环跳动作片段,使用日本松井秀治“21点人体模型”(16个环节,21个关节点)。根据研究需要,在此基础上添加了一个平衡木两侧木端上表面中点连线,采用3D-Signa1Tec解析系统对拍摄的录像进行解析,运用低通数字滤波法对解析后的数据进行平滑处理,获得相关运动学参数。
将获得的谭思欣交换腿结环跳动作运动学参数调入三维虚拟现实系统进行数据演示,以三维动画的形式进行运动学分析。
3结果与分析
交换腿结环跳是通过助跑来完成的技术动作。根据研究目的和分析需要,将完整的交换腿结环跳技术动作划分为3个阶段:1)助跑阶段,即从助跑开始时刻经过2步至左脚蹬离平衡木的过程。2)交换腿劈叉结环阶段,即从左脚蹬离平衡木时刻至劈叉结环完成的过程。此阶段又划分为2个过程:①交换腿过程:从左脚蹬离平衡木时刻至交换腿完成时刻;②劈叉结环过程:交换腿完成时刻至劈叉结环完成时刻。3)落木缓冲阶段,即从劈叉结环完成时刻到身体重心降至最低点的过程。
3.1助跑阶段
助跑阶段是为了更好地完成跳跃动作必不可少的环节,是指在跳步动作前迅速跑动的过程。经助跑运动员可获得水平速度,并为起跳获得垂直速度创造条件。
(v)设个体标准决策矩阵 Dk=(dijk)m×n(i=1,2,...,m,j=1,2,…,n,y=1,2,…,r,k=1,2,…,N)通过加权集结算子转化为群决策矩阵D=(dij)m×n(i=1,2,...,m,j=1,2,…,n),其中,dij=
通过虚拟动作技术再现,可以看到谭思欣采用2步助跑的方式完成助跑动作。在助跑第2步落木时刻,水平方向位移为2.74 m,助跑时间为0.74 s。助跑结束时谭思欣重心水平速度为4.66 m/s,在助跑阶段增大了水平速度(2.64 m/s),如表2所示。

表2 助跑第二步落木时刻参数
谭思欣落木的重心高度为0.79 m,左右髋关节角分别为150.7°和156.6°,此时谭思欣屈髋程度大,躯干曲折完成得好,但身体重心仍然较高。在助跑第2步落木缓冲至左脚蹬离平衡木过程中谭思欣所用时间为0.19 s。如表3所示,谭思欣重心高度升高0.26 m。左髋关节角从150.7°增大到163.5°,增大了12.8°;右髋关节角从156.6°减小到110.4°,减小了46.2°;左/右膝关节角分别从145.3°/138.2°增大到176.6°/149.3°,分别增加了31.3°/11.1°。通过观察虚拟再现三维动作可以看到,在第2步落木和蹬离平衡木时刻,谭思欣均在积极地立上体、蹬伸左腿和上摆右腿,为获得起跳初始高度做准备。在该阶段谭思欣用时短,左髋关节角增幅大,右髋关节角减幅也很大,由此说明谭思欣在此阶段动作快、幅度大,为腾起所做准备比较充分。通过观察再现三维动画,发现谭思欣在积极蹬伸左腿、上摆右腿的同时双侧上肢也在积极地配合上摆,上摆幅度较大,能帮助她获得更大的垂直速度。

表3 左脚蹬离平衡木时刻参数
由表2、表3可知,谭思欣离地角为86.7°,这样有利于获得较高的腾空高度;谭思欣助跑从第2步落木时刻水平速度的2.64 m/s下降到0.88 m/s,下降了1.76 m/s,从水平速度的变化可以发现谭思欣速度变化幅度大,能帮助她获得较高的腾起高度。然而,谭思欣在第2步落木时刻垂直速度-0.50 m/s,而左脚蹬离平衡木时刻的垂直速度2.18 m/s,说明在该过程中谭思欣重心下降幅度较小,获得的垂直速度不够大,这不利于她获得更高的腾空高度。从再现的三维动画上可以明显看出,谭思欣在此过程中动作迅速,虽然保证了速度,但整个动作看上去仍不够流畅[3]。从整体动作技术来看,交换腿结环跳动作的精髓并不单是要获得高度,更要保证有一个向前的运动趋势来达到缓冲的目的并保证技术动作流畅。
3.2交换腿劈叉结环阶段
国际体操联合会编制的《女子竞技体操评分规则》对交换腿劈叉结环跳的要求是:必须挺身后屈并抬头后仰,同时后脚至头高;劈腿180°;前腿至于水平位置。通过观察再现三维动作的曲线发现,谭思欣在完成劈叉结环动作时,重心不是在最高点时刻。这是由于交换腿劈叉结环跳系列技术动作较为复杂,进行劈叉结环跳前需在空中完成交换腿动作。下面分别从交换腿和劈叉结环2个过程进行分析。
3.2.1交换腿过程分析
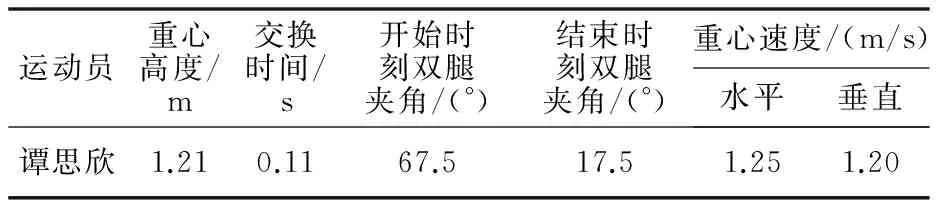
表4 交换腿过程参数
3.2.2劈叉结环过程分析
劈叉结环过程是指交换腿完成时刻至劈叉结环完成时刻。通过观察再现三维动作,发现谭思欣完成交换腿过程后下肢继续绕髋运动,进而进行劈叉结环动作。
如表5所示,在重心最高点时刻,再现三维动作显示谭思欣双腿夹角并未达到180°,身体还未完全舒展开。此时她的重心高度为1.24 m,双腿夹角为150.6°,在重心最高点时刻水平速度保持0.80 m/s的水平速度,向水平方向的运动趋势不明显。发现谭思欣在空中做交换腿劈叉结环动作不够舒展顺畅,在重心最高点时刻运动员的躯干倾角为12.9°,有挺身后屈倾向。
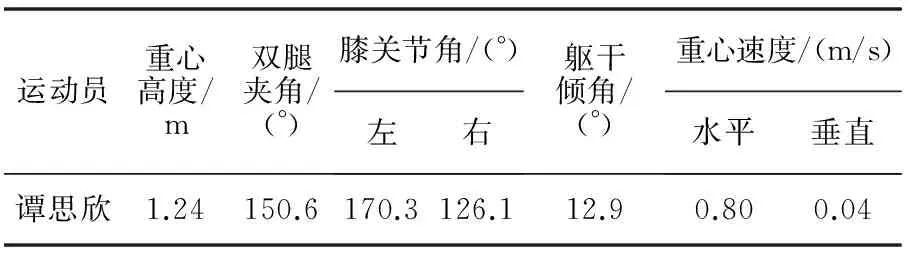
表5 重心最高点时刻参数
如表6所示,在结环完成时刻,再现三维动作显示谭思欣很好地完成了结环动作。谭思欣左腿与平衡木之间的夹角为2.7°,超过了要求前腿位于水平位置的标准。此刻双腿夹角为186.6°,超过了180°的标准要求。此刻谭思欣躯干倾角为19.4°,偏小,头与躯干夹角为92.4°,表明她在此时刻挺身后屈、抬头后仰,但上肢动作总体表现不够积极明显。左膝关节角178.6°,右膝关节角78.8°,说明她前腿(左腿)完全伸直打直,右腿充分屈膝,最终形成一个相对较圆的环。
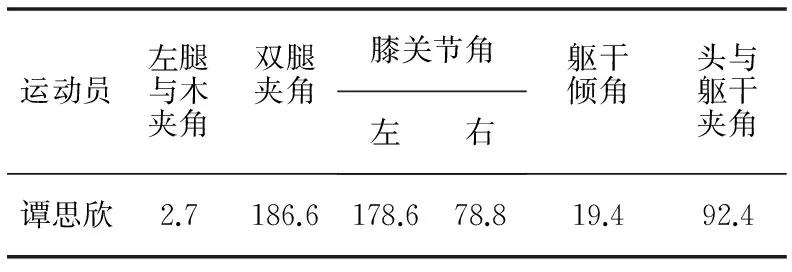
表6 结环完成时刻角度参数 (°)
如表7所示,谭思欣在结环完成时刻的头部与脚步高度差为0.02 m,其脚尖部位要稍高于头部,说明运动员达到了后脚比头部高的要求。水平方向头部与右脚距离差为0.21 m,表明她在最后结环姿势很好[5]。

表7 结环完成时刻距离参数 m
3.3落木缓冲阶段
落木缓冲阶段是指从劈叉结环完成时刻到身体重心降至最低点时刻,要求下肢主动落地,膝关节缓冲弯曲,腰部肌肉紧张,上体保持直立,调整重心稳步落木。
如表8所示,在劈叉结环完成时刻谭思欣的身体重心高度从0.75 m至最低0.66 m,缓冲时间为0.11 s。
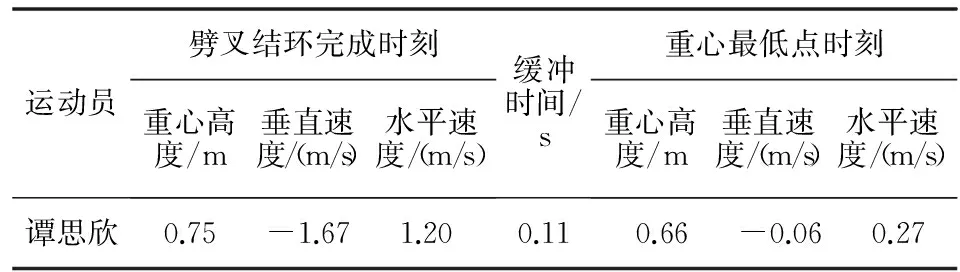
表8 落木缓冲阶段参数
通过分析三维动作,发现谭思欣的交换腿结环跳技术动作完成简单利落。如表9所示,在落木缓冲技术上的特点是垂直下落,屈膝、屈髋幅度较小,以较慢速度来达到稳定落木的目的。谭思欣在该阶段并无明显失分,符合技术动作要求。

表9 落地缓冲阶段角度参数 (°)
4结语
1)助跑阶段。谭思欣采用2步助跑的方式完成动作,助跑阶段在水平方向总位移为2.74 m,助跑时间为0.74 s,在助跑阶段增大水平速度。助跑第2步落木时刻,谭思欣左右髋关节角分别为150.7°和156.6°,此时谭思欣应积极地立上体、蹬伸左腿和上摆右腿,以获得更高的起跳初始速度(垂直速度2.18 m/s),为交换腿结环系列动作的完成提供空间保障。
2)交换腿劈叉结环阶段。谭思欣重心最高点为1.24 m,双腿夹角为150.6°,水平速度为0.80 m/s,水平速度不太大。重心最高点时刻的躯干倾角为12.9°,说明她有挺身后屈倾向,动作不太舒展顺畅。在结环完成时刻,谭思欣左腿与平衡木之间的夹角为2.7°,双腿夹角为186.6°,超过了180°的标准要求。在结环完成时刻谭思欣躯干倾角19.4°,偏小,头与躯干夹角为92.4°,挺身后屈和抬头后仰动作均不够积极明显。谭思欣的头部与右脚部高度差为0.02 m,脚尖部位要稍高于头部,达到了后脚比头部高的要求。水平方向,谭思欣头部与右脚距离差为0.21 m,最后结环姿势要好于国内其他优秀运动员。
3)落木缓冲阶段。谭思欣的特点是垂直下落速度较慢,屈膝、屈髋幅度较小。通过视频分析发现谭思欣的交换腿结环跳技术动作完成很稳定。通过查阅资料发现谭思欣的落木技术动作虽与国内其他优秀运动员有差异,但都是符合技术动作要求的合理性差异。
参考文献:
[1] 国际体操联合会.女子竞技体操评分规则[S].2010:37.
[2] 毕文静.从世界大赛分析平衡木的发展趋势及我国面临的挑战[D].北京:北京体育大学,2013.5-6,22.
[3] HAO W Y,PANG L,REN M Y,et al. Biomechanical service and research in the preparation for Beijing Olympic Games of Chinese Gymnastic Team[C]//.China Institute of Sport Science.Proceedings of the 6th Asian Conference on Sport Science.China Institute of Sport Science,2009:8.
[4] 王蕾.中外优秀女子平衡木运动员动作类型运用特征的对比研究[D] .太原:山西大学,2009.
[5] 赖启财,周继和,赵龙飞,等.我国优秀运动员平衡木交换腿劈叉结环跳技术动作的运动学分析[M]//第十五届全国运动生物力学学术交流大会(CABS2012)论文摘要汇编.北京:中国体育科学学会运动生物力学分会,2012:71-72.
Kinematics Analysis of Tan Sixin’s Virtual Reality Movement of Change Leg Ring Leap
XIONGLanjing1,WANGQingyue2,ZHOUJihe1*
(1.Department of Sport Medicine,Chengdu Sport University,Chengdu 610041, China; 2.Editorial Department of Journal,Chengdu Technology University, Chengdu 611730, China)
Abstract:The performance of Tan Sixin, the champion in the 2013 National Games was filmed on the spot. The change leg ring leap movement was chosen and analyzed by three-dimensional video analysis method which could get a series of kinematics parameters of the movement; make the chosen movement re-display based on the kinematics parameters by using the Virtual Reality Technology( which could output the three-dimensional video), after 360°rotation and make kinematics analysis of the virtual reality movement. The advantages and disadvantages of the performance were found. It turned out that Tan’s movement was relatively normative and reasonable.
Key words:Change leg Ring Leap;Kinematics;Virtual Reality Technology
DOI:10.13542/j.cnki.51-1747/tn.2016.02.019
收稿日期:2016-05-13
基金项目:国家体育总局重点课题“应用沉浸式三维虚拟现实技术建立模拟运动技术及比赛环境的训练测试系统的研究”(2014B015)
作者简介:熊兰静(1992— ),女(汉族),湖北荆州人,在读硕士研究生,研究方向:运动生物力学。
中图分类号:G832.7
文献标志码:A
文章编号:2095-5383(2016)02-0067-04
周继和(1956— ),男(汉族),四川成都人,教授,硕士,研究方向:运动生物力学,通信作者邮箱:1251718382@qq.com。
