基于无线触屏平台的阵列式望远镜控制系统∗
2016-06-27付夏楠黄垒魏建彦
付夏楠 黄垒 魏建彦
(1中国科学院国家天文台 北京 100012) (2中国科学院空间天文与技术重点实验室 北京 100012) (3中国科学院大学 北京 100049)
基于无线触屏平台的阵列式望远镜控制系统∗
付夏楠1,2,3†黄垒1,2‡魏建彦1,2§
(1中国科学院国家天文台 北京 100012) (2中国科学院空间天文与技术重点实验室 北京 100012) (3中国科学院大学 北京 100049)
地基广角相机阵(Ground-based W ide Angle Cameras,简称GWAC)是中法合作SVOM(Space Variab le Ob jects Monitor,空间多波段变源监视器)天文卫星的地基观测设备,M ini-GWAC是其预研和补充设备.针对M ini-GWAC望远镜阵列,介绍了一种基于无线触屏平台进行操控的阵列式望远镜控制系统的设计与实现.从控制系统原理、系统硬件结构、软件设计、实验和测试等方面展开,详细叙述了该系统的开发及实现过程.该系统以基于W inCE系统的触控一体机为上位机,无线收发模块和可编程逻辑控制器(PLC)为核心,具有低成本、数据传输可靠、操作简单等优点,并较好地实现了在M ini-GWAC阵列式望远镜上的应用.
望远镜,无线通信,可编程逻辑控制器,阵列式控制
1 引言
SVOM是中法双方合作的天文科学卫星,其科学目标是发现和观测伽玛暴、研究伽玛暴的辐射特性和爆发机制,以及利用伽玛暴研究早期宇宙和暗能量.地基广角相机阵(Ground-based W ide Angle Cameras,简称GWAC)是SVOM天文卫星的地基观测设备之一,由36个广角相机组成,主要科学目标是监测伽玛射线暴的光学瞬时辐射和其他剧烈变化的天体,在同类型大视场光学巡天项目中处于国际领先地位.M ini-GWAC为SVOM探测伽玛暴而设计,共有6个赤道仪、12套望远镜及12台CCD,其前所未有的能力为中国天文界的许多小组提供了研究伽玛暴以外的众多特别有趣的前沿和传统天文课题的机遇[1].其现场图如图1所示.

图1 M in i-GWAC望远镜阵列Fig.1 M ini-GWAC telescope array
赤道仪控制系统是M ini-GWAC望远镜的重要组成部分,它的主要任务是管理和控制6台望远镜的赤经轴和赤纬轴,实现望远镜的恒星跟踪观测以及望远镜的日常维护调整工作[2].控制赤道仪主要用于两个过程:观测过程和维护过程.在望远镜观测状态下,由观测人员在一楼使用控制台电脑来控制二楼的望远镜系统;而在望远镜的维护过程中,望远镜控制由一名工作人员在一楼使用控制台电脑,另一名工作人员在二楼配合调试,这种复杂的操作过程使望远镜的维护工作极不方便.因此,在此控制系统的基础上,增加一台便携式设备代替原有的控制台电脑作为上位机,用于维护过程中对望远镜赤道仪系统的控制.
本项目在以上背景的基础上,针对M ini-GWAC赤道仪控制系统,设计并开发了利用触控一体机作为上位机,通过无线串口通信控制下位机即西门子可编程逻辑控制器(Programmable Logic Controller,PLC),进而控制望远镜赤道仪的系统,实现了对阵列式望远镜的单独控制和多台联动控制.
2 控制系统原理
2.1 基于PLC的单个望远镜控制系统
依据控制原理,M ini-GWAC赤道仪控制系统由控制器、驱动器、执行器、反馈和被控对象组成,其位置控制框图如图2所示.
在控制系统中,上位机是工控机,下位机是PLC.上位机指定望远镜转动方向和速度后,PLC通过驱动器控制步进电机,进而通过机械传动链,控制赤经和赤纬两个轴的转动,转动角度由增量式编码器进行反馈,形成完整的闭环控制.其中,PLC是一种用户可编程的专用工业控制计算机,具有可靠性高、编程简单、功能完善、轻便易安装、易于维护等优点.本系统中PLC采用西门子S7-200系列,在实时模式下运行速度较快,实时响应性好,其过程控制快速且精确,并可进行开放式通讯.M ini-GWAC望远镜为两轴系统,分别控制赤经和赤纬两个方向,对轴系的控制精度要求较高,需高达角秒的定位功能,并需要精确、平稳的速度输出.步进电机具有转子惯量低、定位精度高、控制简单等特点,可满足其定位功能.而步进电机需用电脉冲信号进行控制,并转换成相应的角位移或线位移;西门子PLC本身带有高速脉冲计数器和高速脉冲发生器,其发出的频率最大为10 kHz,能够满足步进电动机的要求.另外,步进电动机要求把具有足够功率和一定频率的脉冲电压(电流)按照选定的顺序加给控制绕组,而计算机和PLC等控制器只能发出很微弱的脉冲信号,达不到能够直接驱动步进电动机的功率,所以,必须是PLC通过驱动器来控制步进电动机[3−4].
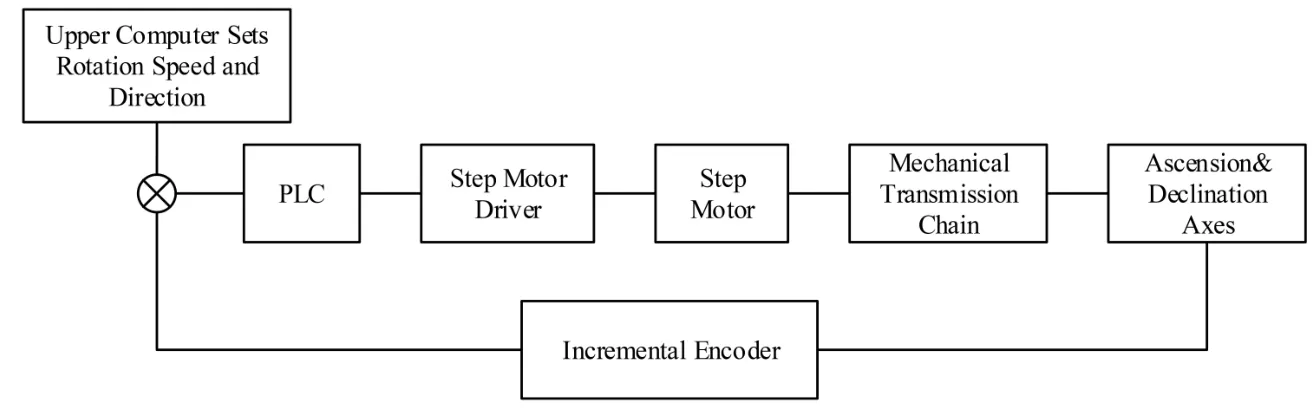
图2 基于PLC的控制原理框图Fig.2 Con tro l p rincip le d iagram based on PLC
2.2 多望远镜控制技术方法
M ini-GWAC望远镜阵列共有6个赤道仪及12台CCD,其控制系统具有规模较庞大、空间分散、结构和控制逻辑复杂、数据信息量大、可靠性要求高等特点.按照单望远镜控制方式进行控制,会带来故障风险过于集中、硬件升级困难、通讯阻塞等诸多问题,因此,为了实现对M ini-GWAC多望远镜系统的最优化控制,应遵循模块化设计思想.通过分解的方法,把复杂系统拆分为若干个相互独立的子系统,通过大系统平台来协调各个子系统之间的逻辑关系,从而实现对多个望远镜观测系统的统一控制和管理.
望远镜硬件系统采用分布式系统架构,主要由上位机、通讯总线、赤道仪控制子系统等组成.其中,上位机为触控一体机,通讯总线选用RS-485总线.RS-485通讯标准使用一对双绞线,采用差分信号和平衡传输,抗干扰能力强,可以实现信号可靠的远距离传送.RS-485支持多节点通讯,平衡双绞线上最多可挂载32个发送器-接收器对,从而可构成多节点通讯网络[5−7].基于此,通过RS-485总线网络,系统实现了上位机对6台M ini-GWAC望远镜的分布式控制和集中管理,其系统通讯设计如图3所示.

图3 多望远镜控制系统通讯设计Fig.3 Comm un ication design of a m u lti-telescope con tro l system
3 系统硬件结构
3.1 硬件选型
在以上背景的基础上,要实现对望远镜赤道仪系统的实时控制,需要选用较小型且高度集成多种功能的PC设备作为上位机,并实现上位机与控制器PLC之间的通信.考虑到现场设备之间相距较开阔,若加设有线电缆,会导致现场布线复杂,因此采用无线串口通讯代替有线串口.无线传输数据的方式可以大大减小线路连接的复杂程度,从而避免电线老化、线路间干扰等问题[8−9].
根据该系统的实际情况,该项目采用蓝海微芯公司生产的嵌入式触控PC作为上位机,型号为LJD-eW inV 5-ST5(以下简称ST 5),这是一款基于W indows CE(以下简称W inCE)操作系统的控制平台,实时性好,可支持多任务切换,主要用于可控制系统平台上的人机界面.W inCE系统基于微软操作系统内核设计,可以基于Visual Studio2005或者Visual Studio2008开发,使用的语言可以用BASIC,C#或VC++,具有良好的可移植性.该设备自带3路标准RS-232,可以和PC或者单片机等实现可靠通讯,解决了部分前端硬件设备不支持网络通讯的难题,因此相比基于web的分布式控制系统具有更好的兼容性和适应性.另外,该设备屏幕直接支持电阻式触摸,控制过程简便直观;其工作温度为−20°C到+70°C,存储温度为−30°C到+85°C,工作湿度(相对湿度,简称RH)为45%到80%,可适用于兴隆基地的户外工作环境.
3.2 系统硬件结构
经过以上控制系统分析和硬件选型后,形成本系统的硬件结构如图4所示.
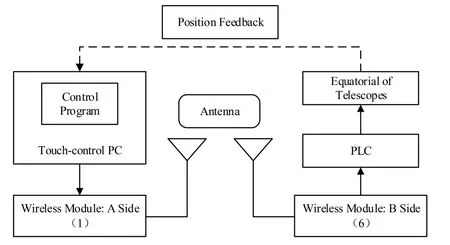
图4 系统硬件结构框图Fig.4 Hardw are structu re d iagram of the system
该控制系统中,输入量为设定的转动方向和角度,输出量为实际的转动方向和角度,触控一体机为上位机,PLC为控制器,步进电机为执行机构,被控对象为赤道仪轴系,以控制人员看到的运动状态(包括实际位置和运动速度等)作为反馈,以实现整个控制过程.
触控一体机和PLC之间采用无线串口模块通信,该无线模块为5 V供电,触控一体机带有集成的RS-232接口,在此定义为A端;PLC带有集成的RS-485接口,定义为B端.其中,A端无线模块由触控一体机的供电电源经降压模块后输出5 V电源供电;B端则由PLC端的供电电源同样经过降压后输出5 V电源供电.A端无线模块与触控一体机连接,6个B端无线模块分别与6台望远镜的PLC连接,无线模块之间可以互相通讯.触控一体机的指令采用广播式发送,6台PLC都能通过无线模块收到上位机发送的指令,但通过对PLC控制指令的字符规定,在某段时间内做出反应的只有指定的PLC,因此可单独控制某一个望远镜转动.在控制过程中,正在被控制的PLC可将望远镜当前赤经和赤纬的位置参数通过无线串口模块传送给触控一体机,并显示在控制界面中,使用户对位置的控制更加精确.
4 通讯数据格式处理及软件设计
4.1 通讯数据格式
在用无线串口模块进行数据传输时,必须对数据规定格式,这样不仅能提高识别效率,也能有效降低传输过程中的误码率.本系统中,用ST5给PLC发指令时,PLC每次识别长度为24位的序列数据包,在24位字符中规定了要控制的望远镜的序号、转动方向和转动速度.PLC每收到一次24位的数据包,就会做出一次响应.若发送数据无误,PLC则解析发送的指令后控制相应的步进电机来实现望远镜赤经轴或赤纬轴的转动和停止.若发送数据不符合格式,则PLC不做响应,从而保证了系统的稳定性.
4.2 控制程序设计
对于M ini-GWAC控制系统的用户界面,其设计目标主要有两个方面:满足控制任务需求和友好的人机界面.该系统的用户界面设计如图5所示.
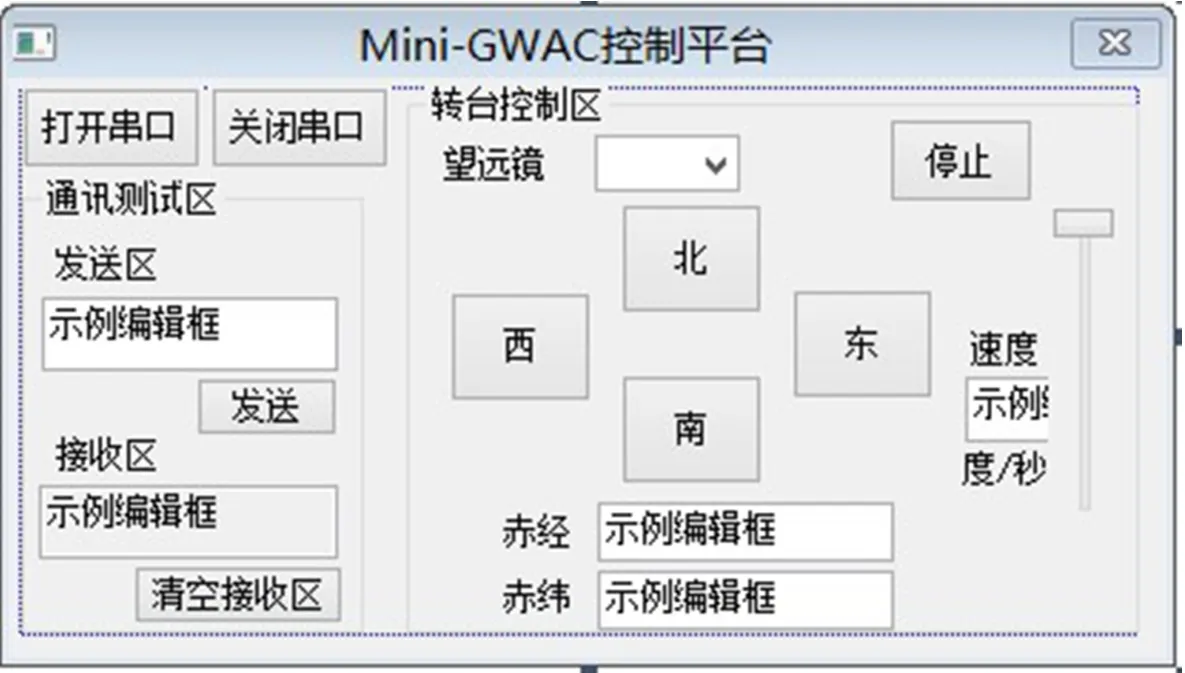
图5 望远镜控制平台用户界面Fig.5 U ser in terface of the telescop e con tro l p latform
依据功能上的不同,M ini-GWAC控制平台大致分为几个功能区:通讯测试区、转台控制区和串口参数设置区.
(1)通讯测试区
通讯测试区主要功能为基本的串口数据发送和接收,用于人机界面出现问题时测试通讯功能是否正常.另外,由于触控一体机不支持直接使用MSComm控件,因此要实现串口通讯功能,需要在用VS2008编程过程中自行封装通讯控件.
(2)转台控制区
转台控制区为最主要的功能区,包括对6台望远镜的转动控制和位置反馈.用户可根据需求选择望远镜序号,右侧滑块可设置运动速度(默认速度为1°/s),点击东南西北任一方向按键,望远镜的赤经轴或赤纬轴即可按指定方向转动,点击“停止”按钮即可停止转动.在运动过程中,所选择的望远镜当前的赤经、赤纬位置可反馈在界面中,使用户对位置有明确、清晰的了解.
(3)串口参数设置区
单击“打开串口”按钮后,可弹出串口参数设置的对话框,在其中可以对串口的各个参数进行设置.默认打开串口1,波特率9600,校验位无,数据位为8,停止位为1.如需改动可利用下拉框调整参数.
5 测试验证
5.1 数据收发测试
为了保证收发数据的准确性和稳定性,在实地测试前预先进行了数据收发测试.测试方法如下:用一台笔记本电脑模拟PLC接收数据,用触控一体机通过无线串口向电脑发送数据,电脑接收的数据显示在串口调试助手的界面中,以此来判断PLC是否能接收到正确的数据.图6是组装好的触控一体机示意图.
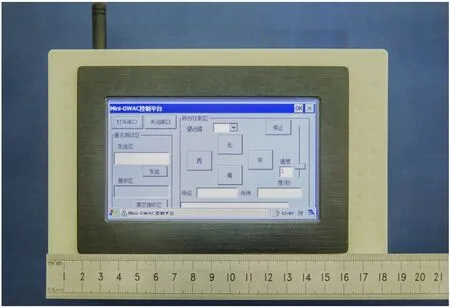
图6 触控一体机组装图Fig.6 Touch-control PC assem b ly d raw ing
如图6设备中,无线串口和充电电池已与ST 5封装在一起,设备外侧有电源开关、充电接口以及数据传输接口,该设备可独立连续使用几十个小时,电量不足时可外接电源线进行充电.在实验过程中,触控一体机一端已组装好,可直接收发数据;模拟PLC一端,电脑连接无线串口模块,用标准24 V电源模拟给PLC供电的24 V电源,接24 V转5 V电压模块,给模拟PLC端的无线串口供电.两端硬件连接好后,进行实时数据传输.经过多次实验,触控一体机界面运行良好,与模拟PLC之间的数据传输快速且准确.
5.2 实地测试
依托在中国科学院国家天文台兴隆基地运行的M ini-GWAC望远镜,进行了实验.对望远镜进行控制时,赤道仪可按照按键指令以规定的速度往相应的方向转动,并能按指令停止.整个控制过程比较高效、稳定.该系统目前已投入使用,达到了预期目的.在实验过程中,控制台电脑中的log文件记录了望远镜的运动过程数据.经过对数据的分析,得到赤经轴和赤纬轴的速度-时间曲线和位置-时间曲线,结果如图7和图8所示.其中,赤纬轴运动方向为自南向北,赤经轴运动方向为自东向西.
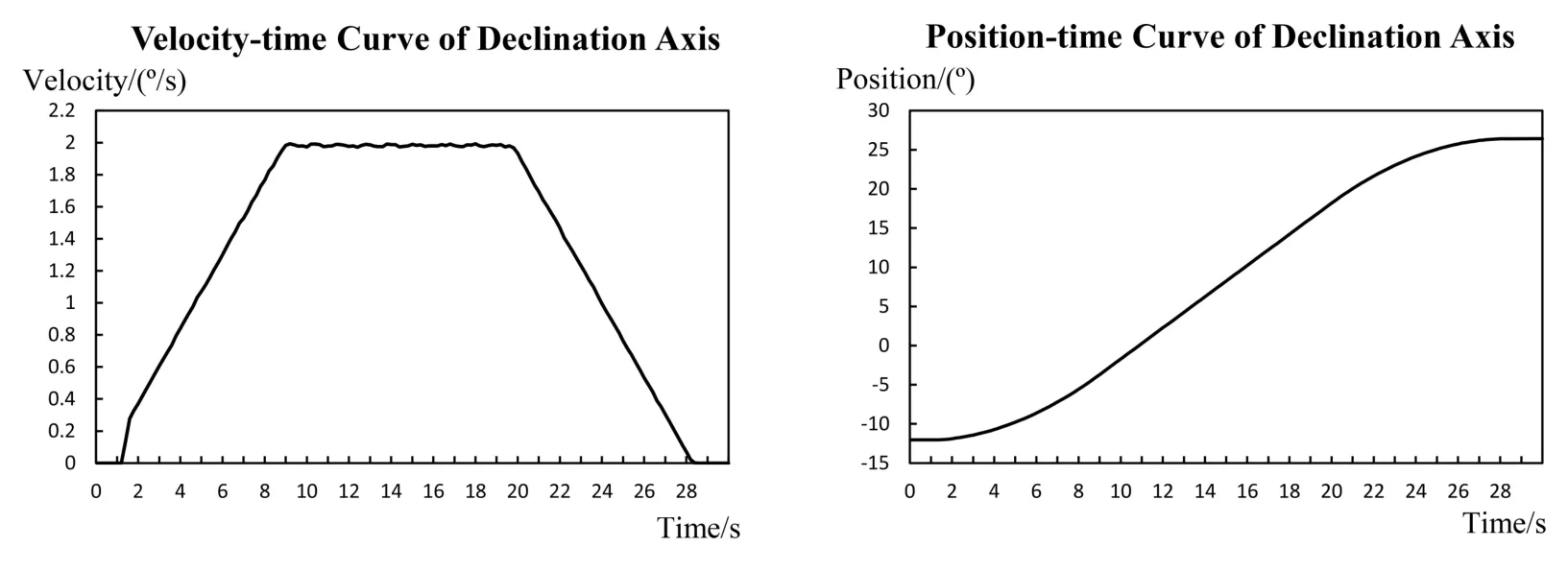
图7 赤纬轴转动过程曲线Fig.7 Rotation d iagram of declination axis
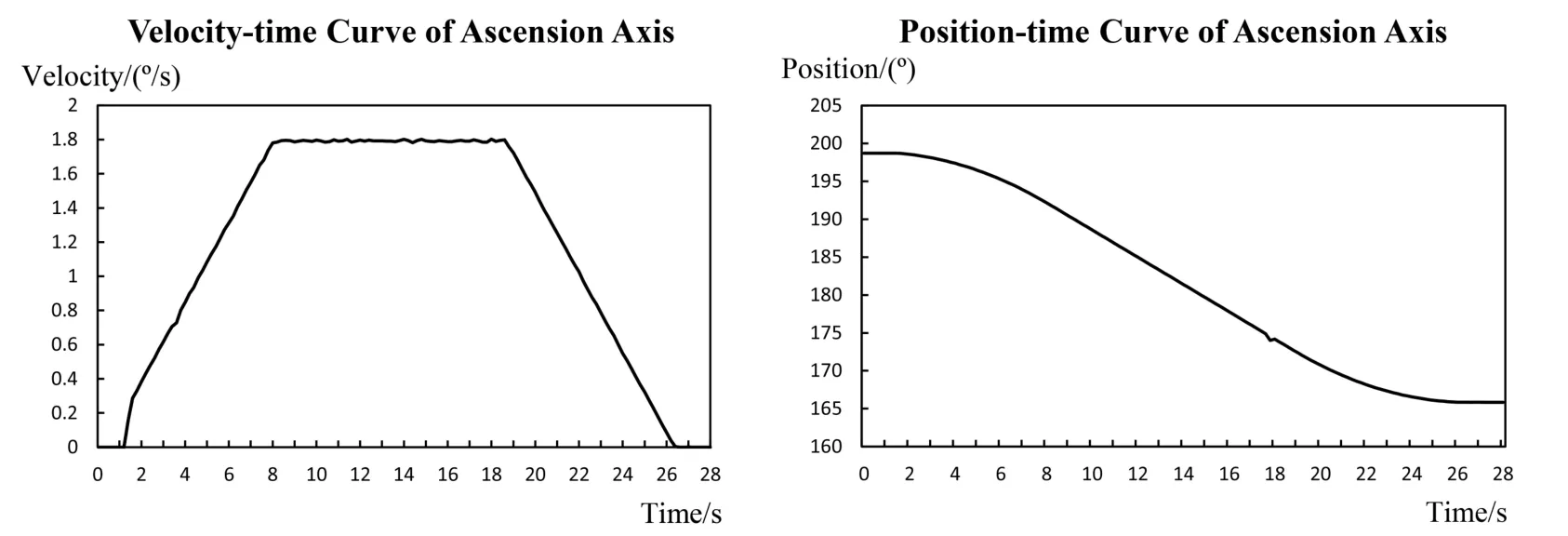
图8 赤经轴转动过程曲线Fig.8 Rotation d iagram of ascension axis
在此基础上,对赤经轴和赤纬轴的转动过程进行数据分析后,得出结果如表1.
从图表中数据可以看出,在转动过程中望远镜速度变化平稳,波动较小,转轴角度变化能达到要求.因此该系统动态性较好,运行过程较为平滑、稳定,可以达到控制要求.
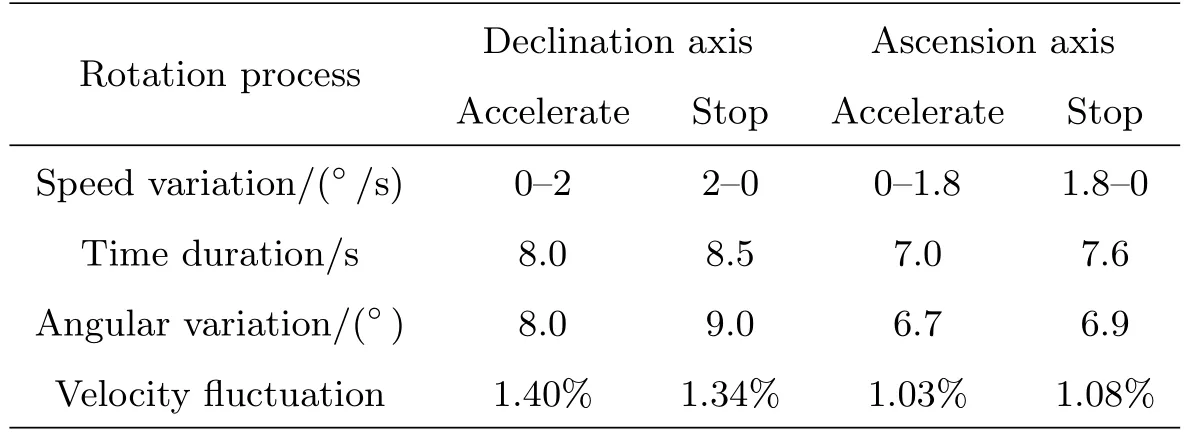
表1 望远镜转动过程参数Tab le 1 R otation p aram eters of the telescop e
6 结论
本文从实际应用需求出发,针对阵列式望远镜控制和管理难度较大的特点,创新性地设计了一种基于W inCE平台的无线触控系统.相对基于web的分布式控制系统, W inCE系统解决了有的分布式系统中前端硬件设备不支持网络通讯的难题,因此具有更好的适用性;另外,W inCE系统基于微软操作系统内核设计,支持VC++编程平台.本文主要结论如下:
(1)该系统能有效运用到实际环境中,实现了对望远镜赤道仪系统的速度和位置控制及对望远镜阵列的单独控制和多台联动控制,有较高的可靠性和实际应用价值.
(2)系统采用触屏式设备作为上位机,具有良好的实时性、可移植性和通用性;并封装充电电池,使控制过程灵活简捷,具有一定的创新性.
(3)由于其优良的通用性和控制能力,该系统对其他基于PLC控制的天文望远镜有一定的参考和借鉴意义.
致谢感谢中国科学院国家天文台SVOM项目组所有老师和同学的帮助,感谢兴隆观测基地成员的广泛支持.
[1]付夏楠,黄垒,魏建彦.天文研究与技术,2016,13:373
[2]黄垒,魏建彦,姜晓军,等.天文研究与技术,2015,12:44
[3]胡佳丽,闫宝瑞,张安震,等.自动化仪表,2009,30:38
[4]江华生,李鸣,高素萍,等.自动化技术与应用,2006,25:54
[5]许燕萍,杨代华.电子科技,2009,22:8
[6]吴桂林,郑建勇.微计算机信息,2008,24:112.
[7]陈久松,朱政,殷卫平,等.制造业自动化,2009,31:14
[8]王萍,陈长青,龚睿,等.微计算机信息,2007,23:281
[9]钮若丹,范成涛.中兴通讯技术,2012,18:42
Telescope A rray Control System Based on W ireless Touch Screen P latform
FU Xia-nan1,2,3HUANG Lei1,2WEIJian-yan1,2
(1 National A stronom ica l Observatories,Chinese Academ y of Scien ces,Beijing 100012) (2 Key Labo ra to ry of Space A stronomy and Techno logy,Nationa l A stronom ica l O bserva tories,Chinese Academ y of Scien ces,Beijing 100012) (3 Un iversity of Chinese Academy of Scien ces,Beijing 100049)
GWAC(Ground-based Wide Angle Cameras)are the ground-based observational instruments of the Sino-French cooperation SVOM(Space Variable Ob jects Monitor)astronom ical satellite,and M ini-GWAC is a pathfinder and supp lement of GWAC.In the context of the M ini-GWAC telescope array,this paper introduces the design and im plementation of a kind of telescope array control system,which is based on w ireless serial interfacemodule to communicate.We describe the development and im plementation of the system in detail in terms of control system princip le,system hardware structure,software design,experiment,and test.The system uses the touchcontrol PC which is based on the W indows CE system as the upper-computer,the w ireless transceivermodule and PLC(Programmable Logic Controller)as the core.It has the advantages of low cost,reliable data transm ission,and simp le operation.Sofar,the control system has been app lied to M ini-GWAC successfully.
telescopes,w ireless communication,PLC,array control
P111;
A
10.15940/j.cnki.0001-5245.2016.04.011
2015-11-04收到原稿,2016-03-03收到修改稿
∗国家自然科学基金项目(U1331202)及国家重点基础研究发展计划项目(2014CB845800)资助
†fxn@nao.cas.cn
‡huangl@nao.cas.cn
§w jy@nao.cas.cn