电涡流缓速器在制动全过程中的影响
2016-06-21撰文姚衎仲何灼馀
撰文/姚衎仲何灼馀
■610039 西华大学 四川 成都
电涡流缓速器在制动全过程中的影响
撰文/姚衎仲1何灼馀2
■610039 西华大学 四川 成都
为了深入分析电涡流缓速器在制动时对汽车制动性能产生的影响,建立了电涡流缓速器—车速的数学模型,结合汽车制动时的数学方程,并通过假设车轮抱死时的四种情况,从理论上分别分析了在缓速器作用下汽车制动时的四种情况的方向稳定性,并得出了相关结论。电涡流缓速器;汽车制动
电涡流缓速器,常见于大型客车、货车上,对于其制动特性的研究,国外学者用有限元分析【1】、Matlab仿真【2】等方法进行力矩的计算,国内何仁等人曾对缓速器性能进行多指标加权评价【3】,但是关于缓速器在制动过程中特性分析,大多只针对汽车匀速行驶工况进行分析【4】,即假设缓速器产生制动力矩恒定。实际上,电涡流缓速器在制动过程中产生的制动力矩在低速时随车速变化较明显,所以对装有电涡流缓速器的汽车制动全过程进行分析显得尤为重要。
缓速器制动力的分析
查阅文献【5】可知,电涡流缓速器制动力矩可由下式计算:

式中:d,N,I,r1,r2,δ,μr,ρ,Np由缓速器结构特性决定,按文献【5】所描述缓速器进行取值,n为其工况转速我们假定力矩增长区间为[500,800](r/min),由涡流的去磁效应假定力矩减小区间为[800,1000](r/min),1000r/min之后力矩恒定。
公式(1)只描绘了转速n=500~1000r/min时缓速器的制动力的变化情况,由文献【6】可以知,当大于一定转速之后,缓速器产生的制动力可以认为是常力,这里假设临界转速为1000r/min。一般车辆开始制动时转速均大于1000r/min,所以把制动时缓速器工作过程分为三段:制动力恒定,制动力增加,制动力减小。
装有缓速器汽车的制动过程分析
在这里,我们只讨论出现车轮抱死时,缓速器在制动过程中产生的影响。
在有车轮抱死时,表明地面条件已经被利用完,即汽车制动减速度和效能恒定性主要取决于地面条件,所以主要考虑制动时车辆的方向稳定性。这里就要引入制动时的I曲线和β曲线。
假设汽车总重为G,质心到后轴中心距离为b,轴距为L,质心高hg,前后轮制动器制动力分别为Fμ1、Fμ2,路面附着系数为φ,地面对前轮、后轮的法向反作用力分别为FZ1和FZ2,汽车制动出现任一抱死时,由力矩平衡可得:
a求解I曲线
假设前后轮同时抱死,即前后轮制动器制动力分别等于各自的附着力,有:
联立(2)、(3)两式可得理想制动力分配曲线(I曲线)方程:

b加入缓速器时β曲线的求解
假设制动器制动力分配系数为β,可得:

通过对(4)、(5)式进行matlab编程,可以得出图1。

图1:前后制动力关系
已知当β线在I曲线以上时,后轮先于前轮抱死,制动方向稳定性差,反之前轮先抱死,方向稳定性好,在引入缓速器后,产生一个稳定性变更区域,车辆制动时方向稳定性有所下降。
c求解车速与驱动轮总制动力及制动过程分析
现在将车速作为变量加入讨论,那么式(5)中的Fr也随车速改变而改变。假设前轮制动力Fμ1不变,后轮制动力Fμ是由后轮制动器制动力Fμ2和缓速器制动力Fr共同决定的变力。
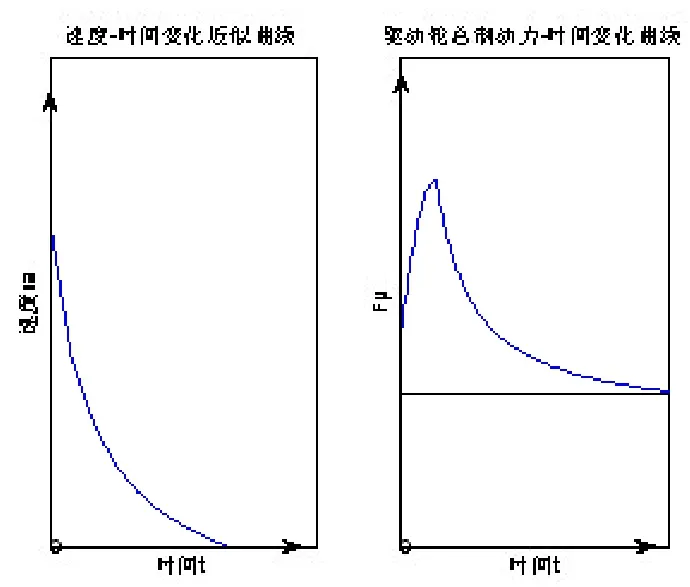
图2:制动过程的描绘
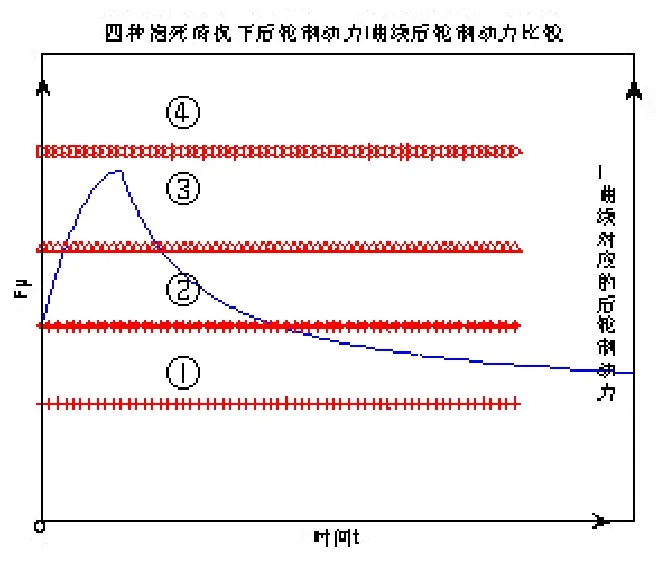
图3:四种情况下后轮理想制动力与实际制动力关系
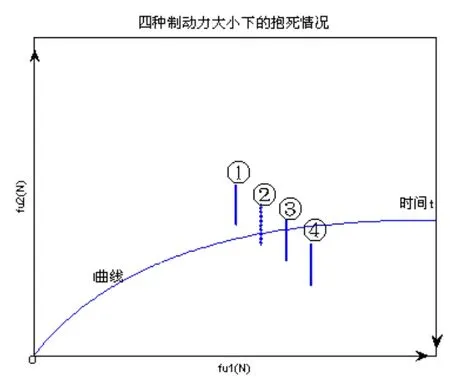
图4:四种制动力下的抱死情况
下面给出车速—时间和驱动轮总制动力—时间曲线:
图2中给出了车速随时间变化的近似曲线,同时也可以看出驱动轮总制动力在车速影响下的总体变化趋势。图中渐近线即驱动轮制动器制动力Fμ2。随着车速的降低,缓速器制动力Fr先增加后减小,而驱动轮(后轮)总制动力Fμ=Fr+Fμ2,所以Fμ也应先增大后减小。
d制动过程分析
下面结合图1中I曲线和图2 中Fμ曲线分析车辆制动时的方向稳定性。分析时,我们选取图1中一点进行研究,即制动时前轮、后轮制动器制动力不变,在一定的路面附着系数φ下面的随缓速器制动力改变而改变的制动方向稳定性。
把某制动工况下I曲线对应后轮制动力分四种情况导入后轮总制动力—时间关系曲线中,得到图3。
图3中:
①:后轮实际制动力横大于后轮理想制动力。
②制动初始时后轮实际制动力大于后轮理想制动力,制动结束时后轮实际制动力小于后轮理想制动力。
③制动初始时后轮实际制动力小于后轮理想制动力,制动过程中随着缓速器制动力增大,出现后轮实际制动力大于后轮理想制动力的一段区间,制动结束时后轮实际制动力小于后轮理想制动力。
④后轮实际制动力横小于后轮理想制动力。
将这四种情况与I曲线放在同一坐标下进行分析,可以直观的得到四种情况下车轮的抱死情况,从而得到汽车制动时的方向稳定性:
已知,前后轮总制动力关系曲线在I曲线上方时,则后轮先抱死,汽车制动时方向稳定性差,容易侧滑,反之,则前轮先抱死,汽车制动时方向稳定性好。定义:后轮先抱死为不稳定区,前轮先抱死为稳定区。下面进行讨论:
如图4:
①制动过程:汽车均处于不稳定区。
②制动过程:汽车由不稳定区进入稳定区。
③制动过程:汽车经历稳定区→不稳定区→稳定区三个阶段。
④制动过程:汽车均处于稳定区。
结论
路面附着系数相对较低时,如汽车行至冰雪路面,缓速器的不正确使用反而会导致汽车制动时方向稳定性降低,图4中的①、②、③三种情况均会在不同程度上导致汽车侧滑,从而引发交通事故。所以正确的使用缓速器,在设计匹配阶段加入路面识别系统、设置ABS—缓速器共同作用的机制等,显得尤为重要。
参考:
[1]Numerical Analysis and Experimentation of a Novel Self-Excited and Liquid-Cooled Eddy Current Retarder[J]. IEEE Transactions on Energy Conversion,2014,29(1):196-203.
[2]L.M.Wu,N.H.Lai, G.T.Wang. Measurement And Simulation Of Automotive Eddy Current Retarder Based On Virtual Reality[J].Key engineering materials,2009,392/394:p.93-.
[3]何仁,衣丰艳.电涡流缓速器性能特性评价方法[J].中国公路学报,2006,19(5): 114-118
[4]赵国柱,魏民祥.缓速器与行车制动系复合制动稳定性的定量评价[J].兵工学报, 2009, 30(2): 185-189
[5]何仁、衣封艳、何建清.电涡流缓速器制动力矩的计算方法[J].汽车工程, 2004, 26(2): 197-200
[6]余志生. 汽车理论[M]. 北京:机械工业出版社, 2009.119
作者简介:
姚衎仲(1995.4-),男,汉族,四川省宜宾市江安县,本科,车辆工程,西华大学。
