基于光速和多普勒频移的雷达探测距离修正方法
2016-06-18陈磊
陈 磊
(中国电子科技集团公司第38研究所,合肥 230088)
基于光速和多普勒频移的雷达探测距离修正方法
陈磊
(中国电子科技集团公司第38研究所,合肥 230088)
摘要:针对雷达脉压通道的目标距离在实际跟踪测量中偏差较大的问题,提出了一种基于光速和多普勒频移的雷达探测距离修正方法,并借助实际雷达检飞试验中目标的全球定位系统(GPS)数据,分析了修正前后的目标距离精度,验证了修正方法的有效性和正确性。
关键词:光速;多普勒频移;雷达探测距离;修正;检飞试验
0引言
在某型雷达的检飞试验过程中,对其检飞目标的测量数据与事后获取的目标GPS数据进行精度分析,发现有百米量级(最大达300 m)的距离跟踪偏差。该雷达采用的是线性调频脉压处理体制,去除雷达系统误差后,脉压通道的测距随机误差理论指标应小于10 m。目标测量位置与实际位置的大偏差使得某型雷达系统无法对探测范围内的目标实现精确定位。
针对这一问题,本文从光速和多普勒频移两方面对雷达的探测距离进行修正,并利用检飞试验数据验证了该距离修正方法的有效性和正确性。
1基于光速和多普勒频移的距离修正方法
雷达通过发射无线电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、方位、高度等信息。但是无线电波在大气中传播时,由于受到大气中不均匀介质的影响,造成电磁波的传播速度小于真空中的光速[1],导致无线电测量设备在定位、测速、导航时产生误差。电磁波在真空中的速度与光速一致,为c=3×108m/s,而在空气环境下的传播速度比光速略小,为c1=299 792 458 m/s。所以,首先对雷达探测目标的距离进行光速修正,假设探测得到的目标的测量距离为R,则光速修正后的距离R1为:
(1)
某型雷达采用的是线性调频脉冲压缩处理体制。该体制雷达具有分辨力高、探测距离远和有源噪声干扰能力强等优点。但线性调频信号对多普勒频移不敏感,在对目标进行探测过程中,当目标存在一定的径向速度时,自目标反射回来的电磁波频率会发生一定的改变。 这就称为多普勒频移效应,这种多普勒频移将会导致脉压后输出信号发生时延,使雷达产生了测距误差[2-3]。假设多普勒频移导致的信号时延为Δt,则:
(2)
式中:fd为多普勒频率;τ为雷达线性调频脉冲宽度;B为线性调频信号带宽。
当fd为正值时,Δt为负,即脉压后的脉冲前移,反之同理。因此,需要对目标探测距离进行实时修正以消除多普勒频移的影响,修正后的距离R2为:
(3)
式中:R2为修正后的目标距离;R1为经过光速修正后的目标距离;v为目标径向速度;f0为雷达载波中心频率;fd=2v/λ=2vf0/c。
在雷达系统状态确定后,即f0,τ,B为常数,此时目标运动的径向速度方向决定了测距误差产生的方向,且该误差与目标径向速度成正比。
另一方面,雷达系统本身存在一定的无法消除的系统误差,该误差的大小可以通过多次检飞试验数据获取,假设雷达探测距离的系统误差为ΔR,则最终的修正距离R3为:
(4)
公式(1)、(3)、(4)阐明了基于光速和多普勒频移的雷达探测距离修正方法,下面通过实际的雷达检飞试验中的目标检飞数据说明该修正方法的有效性和正确性。
2雷达检飞试验验证
2.1检飞试验及目标精度分析
雷达检飞试验是让检飞目标机相对于雷达做径向( 临近和背离) 等高匀速飞行, 沿飞行航线划分成等间隔的距离区间, 记录区间内的发现点数和观测点数, 计算对目标的发现概率和探测精度,包括距离、方位、高度等维度的测量信息精度[4]。检飞试验中,需在目标飞机上加装GPS设备,同时为了提高目标定位的GPS精度,须在雷达处加设GPS差分站,事后对目标机的GPS数据进行差分处理,可使目标的GPS定位精度达到10 m以内。雷达的后端数据处理系统对目标的探测点迹进行航迹起始和跟踪滤波,并记录每一扫描帧目标机的测量数据。
待每架次检飞试验完成后,需对检飞目标的测量数据进行分析,以评估雷达的探测精度情况。具体的精度分析步骤如下:
(1) 读取目标GPS真值数据和目标测量数据;
(2) 将GPS数据和测量数据进行时间配准,即获取每帧目标测量时间点对应的的GPS数据,可采用线性插值法进行配准;
(3) 检查数据配准表,并剔除测量数据异常值;
(4) 计算各维度信息,即距离、方位、高度等数据的一次差;
(5) 根据判别准则(如3σ准则),剔除误差较大的数据,计算一次差均值、均方根值等,并以40 km为距离段,20 km划窗分段分析精度。
在检飞试验中,本文主要关注目标探测距离的精度情况。
2.2修正方法验证结果
在某型雷达检飞试验中,某架次检飞目标的GPS数据距离方位比对曲线如图1所示。

图1 目标距离方位比对曲线
主要取目标直线运动的稳定段进行精度分析,并区分目标向背站过程,这里向站、背站都选择300~420 km距离段分析。
距离未进行修正前,目标向背站距离一次差情况如图2、图3所示。表1、表2表明了目标向背站各距离分段的精度情况。整个向站段,目标距离的一次差均值为294.27 m,均方根值即距离精度为296.67 m;整个背站段,目标距离的一次差均值为188.30 m,距离精度为194.08 m。

图2 未修正前目标向站距离一次差
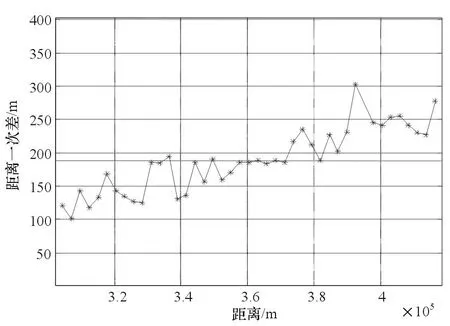
图3 未修正前目标背站距离一次差

距离中心(km)距离范围(km)距离一次差均值(m)距离均方根值(m)样本点数400380~420336.94338.0613380360~400310.57311.3717360340~380291.77292.5417340320~360277.33277.8917320300~340260.12260.7816300280~300251.06251.877
由图2、图3可以看出,目标向背站距离偏差较大,向站分段最大距离偏差达336 m,背站分段最大距离偏差达246 m;且在对应的各距离分段,向背站对应的偏差值也不一致,向站偏差值都比背站偏差值大,各分段向背站偏差值的差约为100 m。这应该是由于向背站目标径向速度方向不同导致的测距误差方向不同。另外,随着x轴方向距离的增大,距离一次偏差也随着增大,呈现出“正斜率”趋势。
采用本文提出的距离修正方法后,目标向背站距离的一次差情况如图4、图5所示。表3、表4表明了目标向背站各距离分段的精度情况。整个向站段,目标距离的一次差均值为10.96 m,均方根值即距离精度为23.53 m;整个背站段,目标距离的一次差均值为6.43 m,距离精度为26.13 m。

表 2 未修正前目标背站各距离分段精度
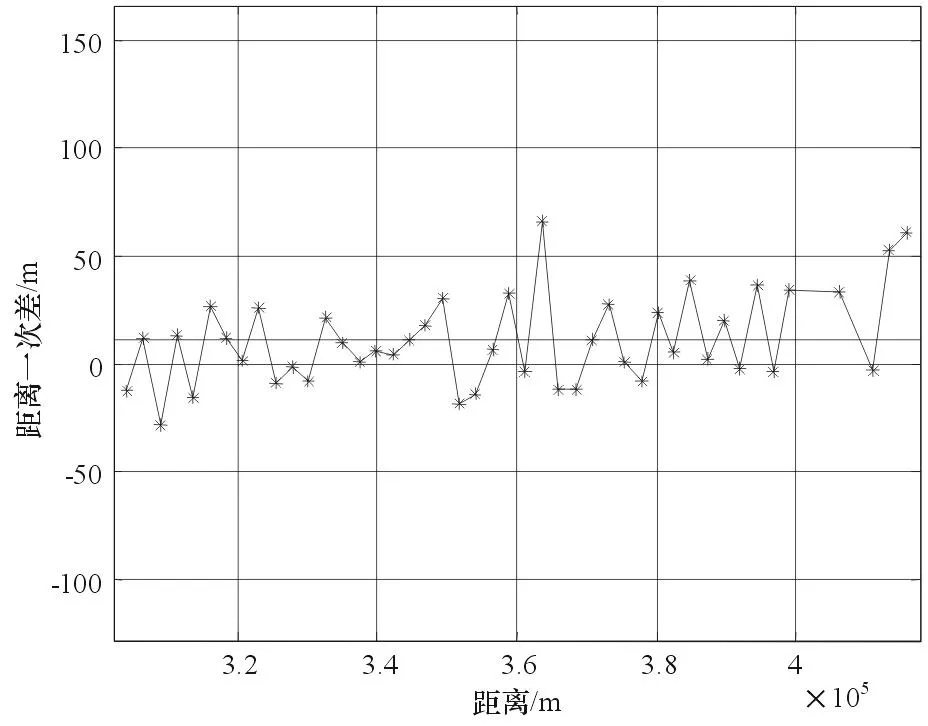
图4 修正后目标向站距离一次差
由图4、图5可以看出,修正后目标距离精度的结果明显优于修正前,雷达测距的系统误差基本被消除,向站全段的距离系统误差仅为10 m,背站全段为6 m,整个距离段目标的距离精度约为25 m。通过光速修正可以有效消除未修正前的距离偏差随着距离增大的“正斜率”;通过多普勒频移修正基本可以消除目标在向站和背站运动过程中引起的不同方向的距离偏差。

表3 修正后目标向站各距离分段精度
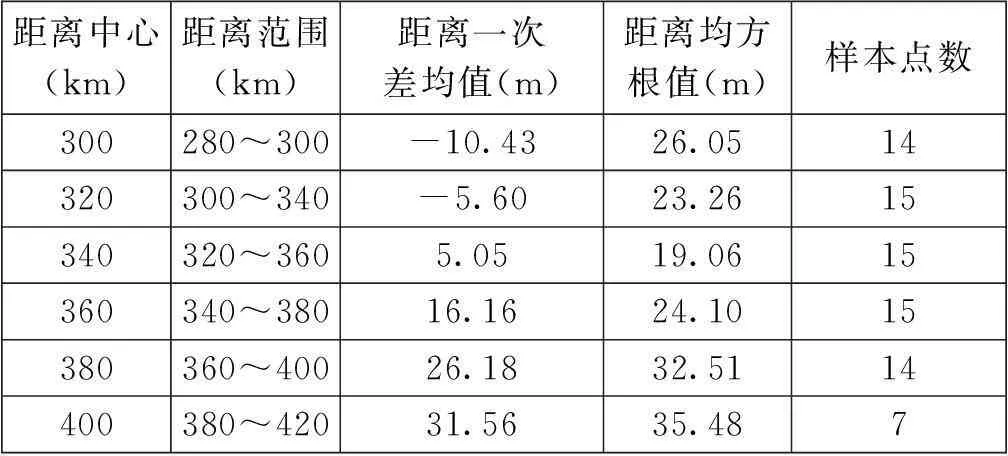
表4 修正后目标背站各距离分段精度
3结束语
本文针对雷达脉压通道的目标距离在实际跟踪测量中偏差较大的问题,从两方面探讨了雷达探测距离的修正方法。借助实际的雷达检飞试验中的目标GPS数据,可以发现基于光速的修正能有效消除目标距离偏差中的数据正斜率;基于多普勒频移的修正可以有效消除目标在向站和背站运动过程中引起的不同方向的距离偏差。最后雷达检飞试验目标精度的分析结果验证了本文距离修正方法的有效性和正确性。
参考文献
[1]张瑜,赤娜,侯佳,等.大气折射引起的雷达定位误差模型[J].电光与控制,2009,16(7):65-68.
[2]胡红军.脉冲压缩雷达距离多普勒耦合对测距影响分析[J].现代雷达,2011,33(12):47-50.
[3]王震,王海风,张锐娟.测量雷达的距离多普勒耦合修正方法研究[J].硅谷,2014(10):69-70.
[4]姚华飞,程子桃,赵光磊.基于GPS技术的机载预警雷达探测精度评估[J].全球定位系统,2012,37(5):24- 27.
Correcting Method of Radar Detection Range Based on Velocity of Light and Doppler Frequency Shift
CHEN Lei
(No.38 Research Institute of CETC,Hefei 230088,China)
Abstract:Aiming at the problem that the target range deviation in radar pulse compression channel of actual tracking and measurement is relatively large,this paper puts forward a correcting method of radar detection range based on the velocity of light and Doppler frequency shift,and makes use of target global positioning system (GPS) data in actual flying test of radar,analyzes the target range precision before and after the correction,validates the validity and correctness of the correcting method.
Key words:velocity of light;Doppler frequency shift;detection range of radar;correction;flying test
收稿日期:2015-09-17
基金项目:国家科技支撑计划课题项目,项目编号:2011BAH24B05
中图分类号:TN953
文献标识码:A
文章编号:CN32-1413(2016)02-0030-04
DOI:10.16426/j.cnki.jcdzdk.2016.02.008