混合高斯模型与三帧差分法相结合的建模新算法
2016-06-17李搏轩沈永良
李搏轩,沈永良,胡 月
(黑龙江大学 电子工程学院,哈尔滨 150080)
混合高斯模型与三帧差分法相结合的建模新算法
李搏轩,沈永良*,胡月
(黑龙江大学 电子工程学院,哈尔滨 150080)
摘要:针对三帧差分法所存在的不足,提出一种改进的基于混合高斯模型与三帧差分相结合的建模方法。为每一个背景像素建立多维混合高斯模型,融入三帧差分法实时判定背景区域和运动区域,使之去除三帧差分带来的空洞现象,并且加入可跟随目标移动的外接矩形框,在其内生成高斯模型,从而减少因高斯模型的介入导致计算量过大的问题,节省运算时间,并且达到理想的除噪效果以及排除外界不必要的干扰等。通过实验进行验证分析,实验结果表明:该方法相比三帧差分法具有更好的除噪效果和减少更多的计算量,适用于实时的单目标检测。
关键词:混合高斯模型;三帧差分法;背景建模;外接矩形框;单目标
0引言
运动目标检测技术是智能视频监控技术中的核心部分,常用的运动目标检测方法有光流法[1-2]、帧差法[3]和背景差分法[4]。3 种目标检测方法各有优缺点,其中三帧差分法以其计算量小和检测效果相对较好等优点而普遍运用。但是检测的目标带有空洞现象以及背景噪声过大成为其最大的缺点,因此许多国内外学者采用背景差分与帧间差分相结合的方法来弥补其缺点,取得了一些效果。混合高斯背景模型最早由Stauffer等[5]提出,该算法是一种基于背景建模的方法,他们首次提出了用K(通常取3~7)个不同的高斯分布去给每个像素建模,很好地描述了复杂的背景,在视频监控领域发挥了很大的优势,提出的应用混合高斯模型建立背景的技术得到广泛认可,这种算法能抑制外部干扰引起的噪声,如光照强度变化、植物随风摆动等,但当背景光照突然发生大范围变化时,该算法很难识别出前景目标,并且该算法还有计算量大、时效性较低的缺点。文献[6]提出的运动目标检测方法是结合了混合高斯背景模型和三帧差分法,并运用相应面积法对检测结果进行鉴别分析。文献[7]使用的自适应背景模型结合了混合高斯模型与帧间差分法,针对不同区域采用不同学习率,有效地提升了处理外界干扰的能力。同时采用三帧差分法,利用其对运动物体的敏感性,实现对背景模型的选择性更新,克服了运动目标对背景模型的干扰,但三帧差分法鲁棒性较差,容易引入噪声干扰。文献[8]提出自适应混合高斯背景模型对运动目标进行检测,采用的是四邻域参数在线更新,八邻域削弱噪声,此算法不仅提高了参数更新率,而且提升计算效率,节省空间内存。但是此算法并没有实现对背景模型的选择性更新,不能消除缓慢运动目标对背景模型的影响。文献[9]采用的方法是为每个像素点加入参考值,提升了背景模型的自适应性,但在一定程度上加大了计算量。
虽然以上算法提升了运动目标检测的效率,但并没解决引入混合高斯模型以下问题: ①当背景中长时间静止的物体突然发生未知变化时,利用混合高斯模型背景建模进行前景检测,容易发生漏检和误检的情况; ②混合高斯模型背景建模不能将背景显露区域与运动目标区域有效的分隔开;③当运动目标区域由静止开始发生缓慢位移时,此算法容易将背景检测区检测为前景,产生“影子”现象;④混合高斯模型要求对视频帧中每个像素点建模,这使得其计算量加大,对视频监控系统要求的时效性产生影响。
本文采用混合高斯模型与三帧差分相结合来改善第一个问题,利用引入的可移动的外接矩形框来改善后3个问题。在传统算法基础之上,加之可移动外接矩形框,并只在矩形框内生成高斯模型,有效地去除噪声干扰等,提高了运算效率,节省了由于混合高斯模型的介入所导致的计算量过大问题。使得混合高斯模型具有更好的鲁棒性和实时性。
1混合高斯模型的建立
当存在光照变化、阴影以及景物移动等情况时,单高斯模型无法准确地描述背景分布[10]。此时,对于任意一个图像点,需要用多个独立的高斯分布加以描述(假设多个因素的影响是彼此独立的),笔者称之为混合高斯模型,其分布密度为:
(1)
式中ωi为加权系数,它应该满足约束条件:
(2)

(3)

通常至少用3个独立的高斯分布(本文采用3个)来描述一个像点的灰度统计分布。其中用于背景描述的高斯分布至少应该有两个,并要给予较大的权值,并使其方差较小。对用于运动前景描述的高斯分布,则应该给予较小的权值,并有相对较大的方差。这样可用权值与方差的比值,通过:
(4)
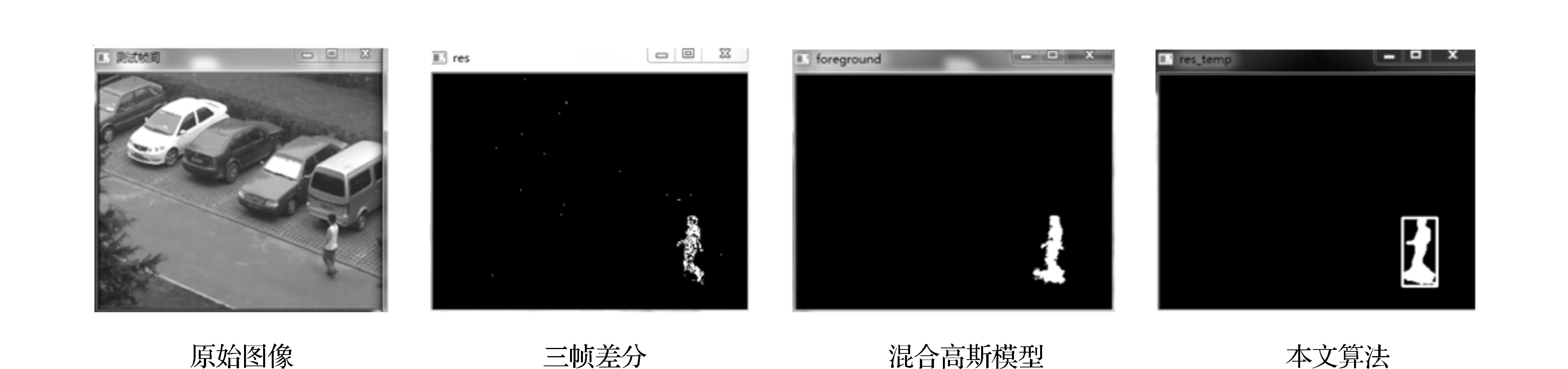
来判断一个像素点究竟是背景还是前景。设定一个阈值P,如果pi 2混合高斯模型与三帧差分相结合的背景建模 2.1三帧差分法 帧差法是图像序列运动对象检测最常用的一种方法。由于相邻两帧的时间间隔很小,因此背景像素的灰度可以认为是相同的。不同仅是运动物体的位置发生了变化,因此相邻帧之间的差分,能够揭示运动物体的存在。其最大的特点是计算简单,速度快,且环境光照变化不敏感。 1)计算第一帧和第二帧的差分: (5) 2)计算第二帧和第三帧的差分: (6) (7) (8) 由于相邻两帧的时间间隔很小,因此,帧差法对于光照变化不敏感。此外它的实现也较简单,且不需要存储背景图像。但是,当在实际应用中存在摄像机抖动、阴影、其他对象遮挡、背景扰动(树木的摇曳、风吹窗帘的摆动等)以及噪声干扰等情况,使得各帧图像之间的背景的像素灰度发生较大变化时,检测的准确性会受到较大的影响。因此须考虑如何去除干扰因素的影响,从而得到鲁棒的检测结果。 2.2三帧差分法与混合高斯模型相结合的背景建模 针对三帧差分的不足,采用三帧差分法与混合高斯模型相结合,来提高其鲁棒性以及对噪声的抗干扰能力。对于通过三帧差分被确定为运动区域的像素点和它的前个高斯分布进行匹配,其中高斯分布按照ωi,t,k/σi,t,k的大小,从大到小排列,匹配公式为[9]: (9) 如果xi,t与它的模型存在匹配,则认为该变化点为背景点。如果与所有的高斯模型都不匹配,则可确定这个点是由目标运动引起的真实运动,为前景点。 2.3算法流程 算法流程图见图1。 图1 算法流程图Fig.1 Algorithm flow chart 3改进的基于混合高斯模型与三帧差分法相结合建模算法 3.1外接矩形框思想 图像处理过程中,外接矩形框的思想经常被用于目标锁定、区域划分等,文献[13]提出了基于运动区域的运动目标提取法,就涉及到了矩形框的思想,文中运动区域的确定就是依靠矩形框来实现的。在运动目标检测过程中,利用三帧差分法能够较完整地提取中间帧图像的运动目标轮廓,且不易受干扰噪声影响等特点,将三帧差分法检测到的运动目标信息全部包含在一个外接矩形框中,这样可将运动目标的区域轮廓局限在这个矩形框内,然后在确定的运动区域内对混合高斯模型和三帧差分图像进行结合,从而避免了背景裸露、噪声干扰等对目标检测结果的影响,提高了检测精度。 3.2本文算法 首先通过三帧差分法,检测到需要的运动目标,通过对检测到的运动目标进行中值滤波以及形态学滤波(膨胀),以便后续处理。然后运用OPenCV中的cvFindContours 函数[14],获得每一帧图像中运动目标的轮廓(通过5×5的中值滤波已消除噪声),对每一帧图像的运动目标左上角点和右下角点进行遍历,取左上角点坐标中x+y之和最小的坐标点为该帧图像运动目标的左上角点,取右下角点中x+y之和最大的坐标点为该帧图像运动目标的右下角点,最终将每帧图像中对检测到的运动目标的外接矩形框合成为一个,并将检测到的运动物体包含在矩形框内,再将该矩形框设置为ROI(即感兴趣区域),使高斯模型在遍历时,只更新和生成这个ROI区域,从而减少计算时间,提高运算效率。最后通过cvzero函数清除上一帧图像中的矩形框,对每帧图像都采用此做法。即得到可跟随运动目标移动的外接矩形框。因此,在外接矩形框内达到混合高斯模型与三帧差分相结合的目的,只需计算外接矩形框以内生成运动目标即可,使计算量减少,有效地抑制了噪声等干扰,而且弥补了三帧差分法所带来的空洞现象。 3.3实验结果及分析 本文算法在vs2005上进行了测试,通过对摄像机拍摄的320×240的序列图像进行了计算处理,分别将该算法与三帧差分法和带有混合高斯模型的背景差分进行比较。本文所有的实验均在AMD A8-4500M处理器、4G内存的PC机上进行(图2~图6)。 图2 第25帧Fig.2 The 25th frame 图3 第50帧Fig.3 The 50th frame 图4 第61帧Fig.4 The 61th frame 图5 第84帧Fig.5 The 84th frame 图6 第152帧Fig.6 The 152th frame 分别在视频序列的第25、50、61、84、152帧进行比较,从中不难看出,三帧差分法始终带有空洞和噪声现象,而带有混合高斯模型的背景差分则去除了空洞和大量的噪声,但由于计算量过大导致在生成过程中可能会有误检,难免会带有一些噪声干扰。而本文所提出的算法,在同帧图像中检测效果良好,无论目标运动或静止都无其他噪声生成,达到除噪效果而且减少了计算量,提高了运算效率。 4结论 针对混合高斯模型计算量过大的不足,笔者提出了一种改进的背景建模算法。通过算法验证:该方法相比高斯背景建模,具有更好的实时性以及除噪效果,能够有效地解决视频序列中运动目标由计算量大而导致背景更新速度慢的问题,适用于实时的单目标检测和跟踪。 参考文献: [1]BPeil.FARP: Mining fuzzy association rules from a probabi-listic quantitative database[J]. Information Sciences,2013,29(19):249-268. [2]郑盼丽,戴牡红,谭一云,等.自动生成数据挖掘算法的研究与应用[J]. 计算机科学,2012,39(13) : 171-173. [3]张志锋,马军霞. 基于三段式编码GA的连续属性关联规则挖掘方法[J]. 科学技术与工程,2012,12(26) : 6640-6643.[4]Massim Y.Efficient immune algorithm for optimal allocations in series-parallel continuous manufacturing systems[J].Journalof Intelligent Manufacturing,2012,23(5) : 1603-1619. [5]Stauffer C,Grimson W. Adaptive background mixture models for real time tracking[J]. In Computer Vision and Pattern Recognition, 1999,43(16):198-208 [6]Tai F,Yu X,Ye W. Rmote live demon stration system underlimited bandwidth[J].Journal of Computer Applications,2009,29(6) : 381-383. [7]Jiang Y, Jiang J, Zhang Y. A novel fuzzy multi objective model using adaptive genetic algorithm based on cloud theory for service restoration of shipboard power systems[J]. Power Systems,IEEE Transactions on,2012,27( 2) : 612 -620. [8]Vidal T.A hybrid genetic algorithm with adaptive diversitymanagement for a large class of vehicle routing problems with time-windows[J].Computers & Operations Research,2012,38(9):124-130. [9]Yin G,Chen Y. The analysis of affecting factors of playing delay in P2P live[J].Journal of Inner Mongolia Agricultural University,2012,33( 5) : 219-221. [10] 赵荣椿,赵忠明.数字图像处理与分析[M].北京:清华大学出版社,2013:417-424. [11] Senst T, Evangelio R H, Sikora T. Detecing people carrying objects based on an optical flow motion model[C]//Washington. DC: IEEE Computer Society,2011: 301-306. [12] 宋雪桦, 陈瑜, 耿剑锋, 等. 基于改进的混合高斯背景模型的运动目标检测[J]. 计算机工程与设计, 2010,31(21): 168-170. [13] 郭宝龙, 侯叶. 基于图切割的图像自动分割方法[J]. 模式识别与人工智能,2011,24(5):604-609. [14] Gary Bradski & Adrian Kaebler.Learning OpenCV[M].于仕琪,刘瑞祯,译.北京:清华大学出版社,2009:246-271. New algorithm based on Gaussian mixture model and three frame difference method LI Bo-Xuan,SHEN Yong-Liang*,HU Yue (Collegeofelectronicengineering,HeilongjiangUniversity,Harbin150080,China) Abstract:An improved model based on Gaussian mixture model is proposed which is combined with three frame difference method, aiming at the shortcomings of the three frame difference method.We establish multidimensional Gaussian mixture model for each background pixels to remove the cavitations and add three frame difference method to Real-time determine the background area and sports area. An external rectangular box is added which can follow the target's movement and in which Gaussian mixture model is generated. This method can reduce the large calculating quantity and save operation time for the intervention of Gaussian mixture model, get ideal effect of noise cancellation and eliminate the unnecessary interference. Through the experimental validation and analysis, it turns out that compared with three frame difference method, this method has better effect on noise cancellation and can decrease more computing. It is suitable for the real-time target detection. Key words:Gaussian mixture model; three frame difference method;background model; external rectangle frame; single target DOI:10.13524/j.2095-008x.2016.01.011 收稿日期:2015-09-10; 修订日期:2015-12-07 基金项目:国家自然科学基金青年科学基金资助项目(61503127) 作者简介:李搏轩(1990-),男,黑龙江哈尔滨人,硕士研究生,研究方向:智能检测与图像处理,E-mail:Boxuan_Lee@163.com;*通讯作者:沈永良(1964-),男,黑龙江双鸭山人,教授,研究方向:智能检测与自动化仪器,E-mail:shen-yl@163.com。 中图分类号:TP391.41 文献标志码:A 文章编号:2095-008X(2016)01-0054-06