半悬挂式联合整地机机组转弯性能分析
2016-06-16曹肆林卢勇涛营雨琨王吉亮王敏王序俭喻启忠
曹肆林,卢勇涛,营雨琨,王吉亮,王敏,王序俭,喻启忠
(1.新疆农垦科学院机械装备研究所,新疆 石河子 832000;2.克拉玛依五五机械制造有限责任公司,新疆 克拉玛依 832034)
半悬挂式联合整地机机组转弯性能分析
曹肆林1,卢勇涛1,营雨琨1,王吉亮1,王敏1,王序俭1,喻启忠2
(1.新疆农垦科学院机械装备研究所,新疆 石河子832000;2.克拉玛依五五机械制造有限责任公司,新疆 克拉玛依832034)
摘要:【目的】 为半悬挂式耕整地机械的设计与改进提供理论参考.【方法】 以1ZL-7.2联合整地机机组为研究对象,分析其转弯过程.【结果】 试验给出了机组获得最小转弯半径的基本条件,明确半悬挂架的设计要点.
关键词:农业工程;联合整地机;半悬挂;转弯半径
整地是新疆农业生产中一个重要的、基础的作业环节,是促进农业增产增收和可持续发展的重要手段.联合整地机采用多种工作部件联合作业,一次作业即可完成松土、碎土、平整、镇压等工序,形成土壤细碎、上虚下实的理想种床,可显著提高整地作业的效率、质量和经济性,技术优势非常明显,已经在新疆地区广泛应用[1-3].随着大马力拖拉机的逐步推广,联合整地机也在朝着大型化的方向发展[4,5],工作幅宽多集中在5.6~7.2 m[6],广泛采用半悬挂的方式与拖拉机挂接.
转弯性能是联合整地机的一项重要性能,如果机组能够以最小的转弯半径进行转弯,就可以获得更好的作业性能和道路通过性.但是,转弯半径并不是衡量机具作业质量的考核指标,因此在设计过程中未能引起足够的重视.基于此,对联合整地机的转弯性能进行深入研究,以对联合整地机的设计及作业性能提供技术指导和参考.
1联合整地机结构及工作原理
1.1结构特点
1ZL-7.2联合整地机结构如图1所示,主要由主机架、左右翼架、半悬挂架、前置耙组、后置耙组、地轮、平地齿板、碎土辊和镇压器等组成.一般前置耙组上安装缺口耙片,后置耙组上安装全圆耙片.其机架通用性较强,各工作部件均与机架独立连接,可根据用户需要选装钉齿框、平土杠、搂膜弹齿等工作部件,以适应不同土质条件下的整地需要.
1.2工作原理
工作时,在牵引力、机组重力和土壤阻力的作用下,前列缺口圆盘耙组和后列全刃圆盘耙组上的耙片切入土壤滚动前进,进行松土、碎土作业;随后平地齿板平掉土埂及凹坑,并进一步压碎土块,疏松土壤;后续螺旋碎土辊对土块再一次进行破碎,被抛起的小土块和细土粒落在地表,从而隔断地下水蒸发;最后,镇压器压碎土块并压紧耕作层,从而一次完成松土、碎土、平整和镇压四道工序,形成地表平整、土壤细碎、上虚下实的理想种床.机具耕深由液压系统和牵引系统控制,工作状态下地轮可不承重,整地后不产生轮辙[7-8].

1:左翼架;2:主机架;3:右翼架;4:半悬挂架;5:前置耙组;6:后置耙组;7:地轮;8:平地齿板;9:碎土辊;10:镇压器.图1 1ZL-7.2联合整地机结构Fig.1 Structure of 1ZL-7.2 combined cultivating machine
2转弯半径对机组性能的影响
转弯半径是汽车常用的一个性能指标,定义为汽车转向中心到外转向轮与地面接触点的距离,它在很大程度上表征了汽车能够通过狭窄弯曲地带或绕过不可越过的障碍物的能力[9].转弯半径越小,汽车的机动性能越好[10].联合整地机与拖拉机构成的一个机组,就相当于一个超宽超长的带挂汽车.相对应的,它也存在转弯半径.由于其外形尺寸较大,它的转弯半径亦比较大.
联合整地机工作时多采用对角作业的方式,到地头拐弯时,不可避免的会漏整一小块地.而最小转弯半径的大小将影响到地头的漏整面积.如图2所示,左右2个拖拉机最小转弯半径不相同,当它们到达地角转弯时,最外侧的轨迹线分别为轨迹线Ⅰ和轨迹线Ⅱ.拖拉机Ⅰ的最小转弯半径比较大,其漏整面积为区域Ⅰ和区域Ⅱ的面积总和,拖拉机Ⅱ的最小转弯半径比较小,其漏整面积为区域Ⅱ的面积.由此可见,最小转弯半径越大,漏整面积也越大,最小转弯半径越小,漏整面积也越小.

1:左翼架;2:主机架;3:右翼架;4:半悬挂架;5:前置耙组;6:后置耙组;7:地轮;8:平地齿板;9:碎土辊;10:镇压器.图2 联合整地机转弯半径Fig.2 Turning radius of combined cultivating machine
3机组转弯过程分析
半悬挂式联合整地机机组在直线行驶时,拖拉机和后面悬挂的联合整地机相对于地面角速度均为零,所以它们之间的相对角速度为零,即没有相对转动.
当拖拉机开始转弯时,拖拉机和整地机相对于地面都有了角速度.图3是拖拉机刚开始转弯时的状态.图中, A点是拖拉机前桥中点,B点是拖拉机后桥中点,C点是悬挂点,D点是整地机运动中心,E点是整地机悬挂和整地机主体的连接点.在转弯刚开始时,驾驶员在很短的时间内转动方向盘,使外侧前轮偏转一个角度QR.此时拖拉机和整地机的纵轴线仍然重合,A、B、C、D四点此时的瞬时速度分别是VA、VB、VC、VD.分别过点A、B做VA、VB的垂线,两线相交于点QT,这一点是拖拉机的瞬时转向中心.过点C做VC的垂线,此线必过点QT.再过点D做VD的垂线,与VC的垂线相交于点QZ(因图面位置所限,未示出),此点即为整地机的瞬时转向中心.C点为拖拉机和整地机的相对瞬心.θ角是VA与拖拉机纵轴线的夹角[11-13].

图3 机组转弯初始状态Fig.3 Initial state of turning
由运动学基本公式可得:
拖拉机的角速度为:
(1)
整地机的角速度为:
(2)
拖拉机和整地机的相对角速度为:
ωX=ωT-ωZ
(3)
将(1)、(2)式带入(3)式整理得:
(4)
拖拉机继续向前行驶,拖拉机和整地机的纵轴线不再重合,它们之间将发生偏转,且偏转角度随着拖拉机向前行驶而不断改变.图4是转弯后某一瞬时的情况.拖拉机的纵轴线和整地机的纵轴线之间的夹角为α,拖拉机和整地机轮轴的延长线交于点O,∠AOTB=α.VC与拖拉机纵轴线的夹角为β.由几何关系可知,∠AOTB=θ,∠FOTB=θR.它们之间的关系如下:
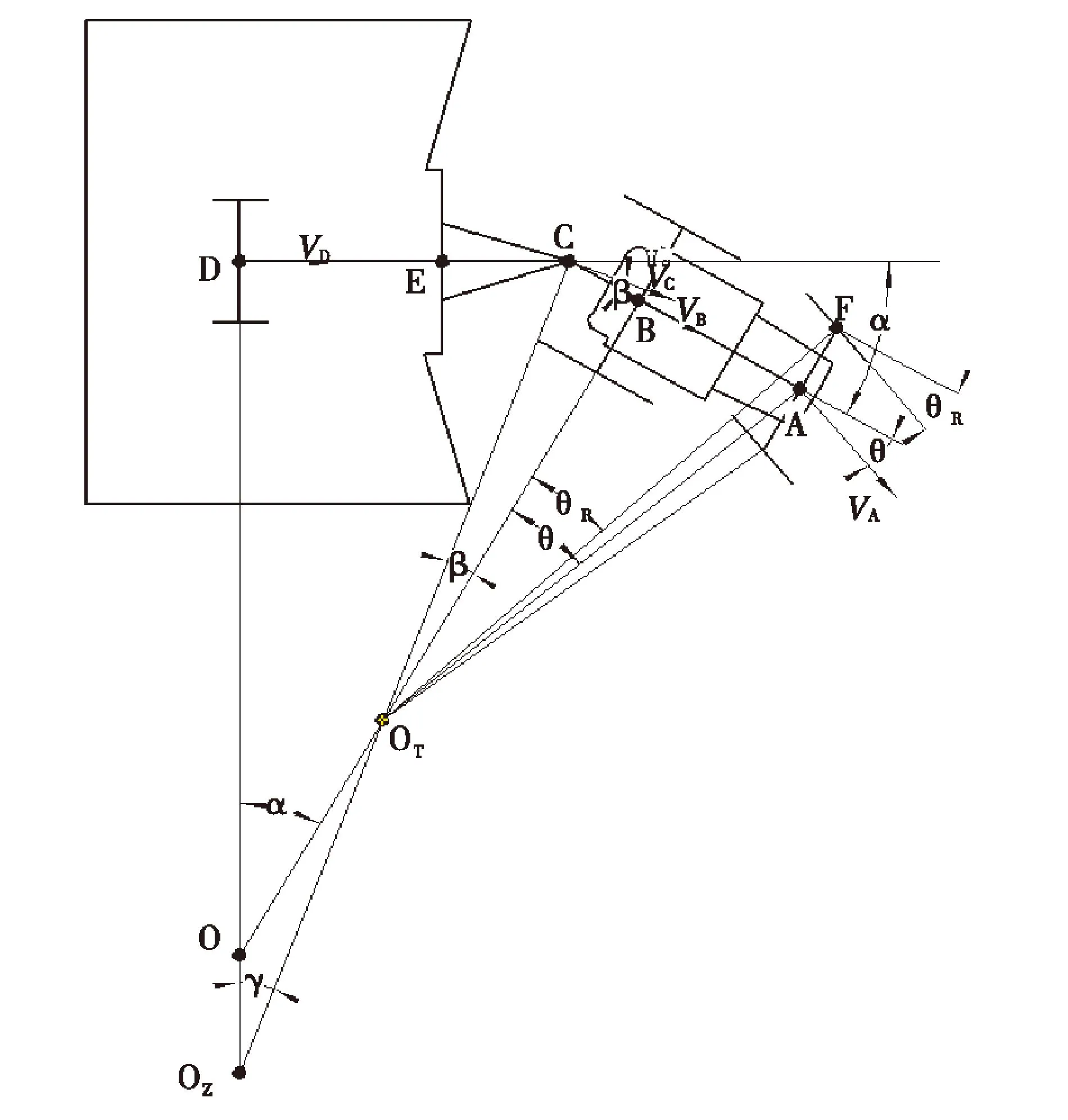
图4 机组转弯过程分析Fig.4 Analysis chart of turning
(5)
其中: LT为拖拉机前后桥轴距;b为拖拉机前轮距.
γ=α-β
(6)
BOT=LTcotθ
(7)
(8)
(9)
其中:L为悬挂点到拖拉机后桥中点的距离;LZ为整地机悬挂点到整地机运动中心的距离.

(10)
联立以上各式可得:
(11)
(12)
(13)
从式(10)~(13)可以看出,当拖拉机转向角θ不变时,拖拉机的转弯角速度ωT与VB成正比,联合整地机的转弯角速度ωZ和相对角速度ωX均为α的函数,随着α的变化而变化.变化的结果分以下2种情况分析:

由式(13)可导出,当ωX=0时,α角的计算公式:
(14)

4最小转弯半径的获取条件
参考铰接式客车,半悬挂式联合整地机的转弯半径可由下式计算[13]:
(15)
由式(15)可知,理论上,转弯半径R的大小只与外前轮偏转角θR有关,且成负相关.选迪尔6J-1654拖拉机作为1ZL-7.2联合整地机的配套动力,实测一些基本参数为:LZ=4 060mm,LT=2 685mm,L=1 450mmL,θmax=25°,于是最小转弯半径Rmax=6 353mm.

根据式(14)可得:
α角实际能否达到最大值,取决于半悬挂架的结构设计,其前端结构如图6所示,悬挂梁中部与上下两块连接板铰接,两端分别与拖拉机左右下拉杆连接,悬挂梁可绕铰接点转动.为保障机具可以获得最小转弯半径和紧凑性,悬挂架在设计上需要满足:悬挂架的悬挂梁绕铰接点的转动角度α能够达到αmax;悬挂点应与整地机组保持足够的距离,使得拖拉机配置双轮胎进行田间作业时,悬挂梁绕铰接点转动至αmax过程中,后轮与联合整地机不会发生碰撞.

图5 最小转弯半径转弯情形Fig.5 Turning with minimum radius
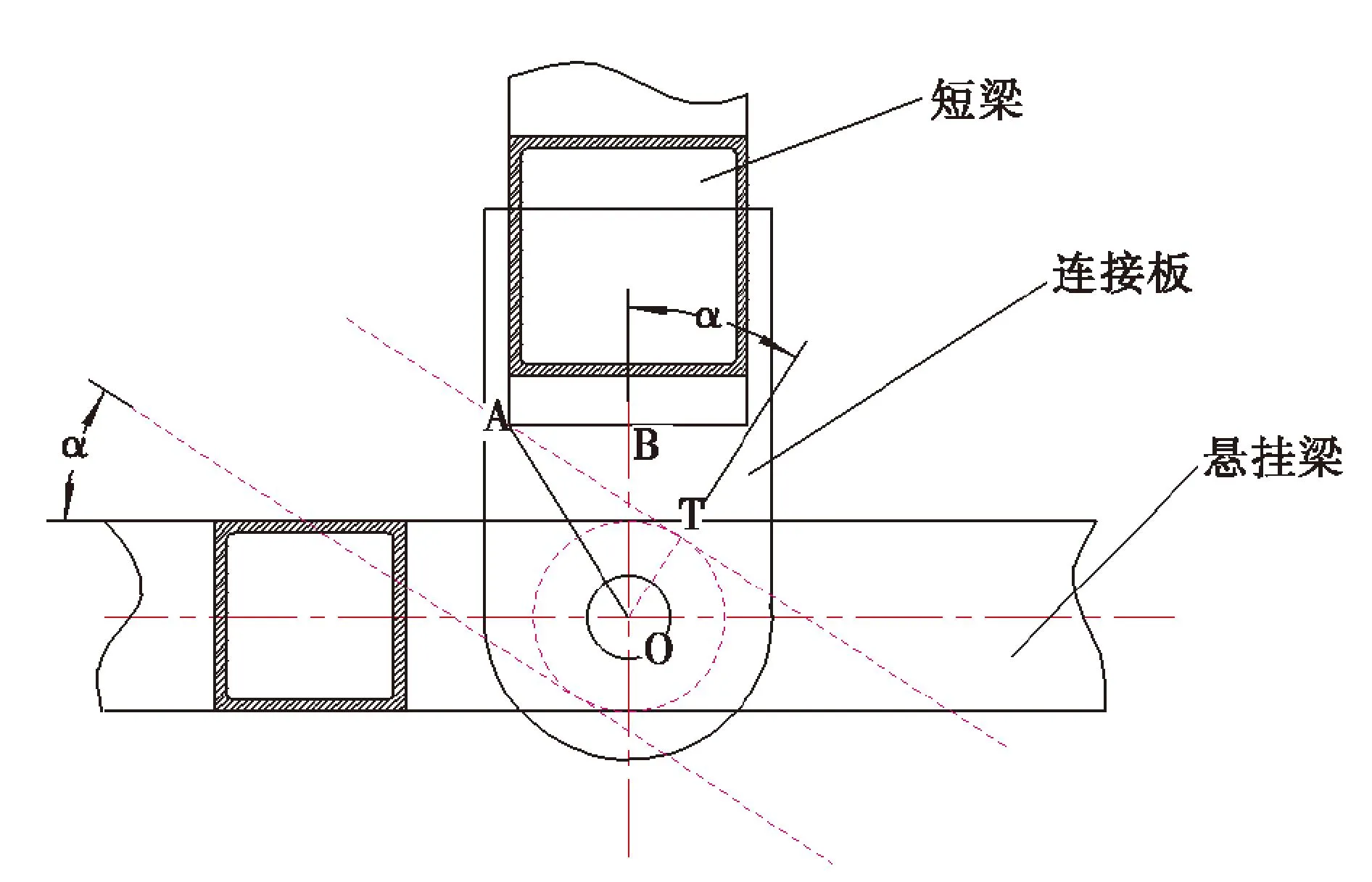
图6 悬挂架前端结构Fig.6 Front-end structures of suspension frame
5结论
引入了转弯半径来分析联合整地机的转弯性能,通过图示法阐明了转弯半径对机组性能的直接影响:转弯半径越大,机组作业盲区越大.

以1ZL-7.2联合整地机为对象,选用迪尔6J-1654拖拉机作为配套动力,计算得出理论上机组最小转弯半径为6 353mm;明确机组获得最小转弯半径的条件是:拖拉机以前轮最大偏转角转弯且ωx=0,得出此时α角达到最大值为67.3°,进而明确了半悬挂架的设计要点.
参考文献
[1]王序俭,汤智辉,秦朝民,等.1LZ-7.2联合整地机的研制[J].新疆农机化,2004(1):28-29
[2]唐军,曹肆林,王序俭,等.几种联合整地机的性能特点及比较[J].农业机械,2011(5):94-95
[3]李进江,孟祥金,李咏新.浅析联合整地机械化技术的优点[J].农机科技推广,2011(6):58
[4]谢雨峰,许剑平,李存斌,等.国内耕作机械的现状及发展趋势[J].农机化研究,2009(11):238-240
[5]贾洪雷,陈忠亮,刘邵辰,等.耕整联合作业工艺及配套机具研究[J].农业机械学报,2001,31(5):40-43
[6]曹肆林,王序俭,王敏,等.1LZ系列联合整地机的设计与试验[J].西北农业学报,2012,21(6):202-206
[7]何义川,王序俭,曹肆林,等.新型联合整地机的设计与实现[J].安徽农业科学,2012,40(10):6313-6315
[8]王敏,曹肆林,刘云,等.一种新型联合整地机的开发与推广[J].农机化研究,2012(3):152-154
[9]罗卫东,肖军,何正强.牵引车最小转弯半径的提升桥布置研究[J].煤矿机械,2011,32(3):69-71
[10]周全申,乔永钦,朱琳.车辆转向机构设计与分析[J].河南工业大学学报:自然科学版,2006,27(6):60-66
[11]陈银清,洪添胜,孙同彪.山地果园单轨货运机的最小转弯半径及最大承载量分析[J].农业工程学报,2012 ,28(增刊1):50-54
[12]赵党社,魏玲霞.铰接式客车最小转弯半径和通道宽度的计算[J].客车技术与研究,2007(2):27-29
[13]吴启权.铰接式公共电汽车的最小转弯半径[J].城市车辆,1994(4):13-15
(责任编辑李辛)
Analysis of turning performance for Semi-mounted combined cultivating machine
CAO Si-lin1,LU Yong-tao1,YING Yu-kun1,WANG Ji-liang1,WANG Min1,WANG Xu-jian1,YU Qi-zhong2
(1.Xinjiang Academy of Agricultural and Reclamation Science,Shihezi,Xinjiang 832000,China;2.Wuwu Machinery Manufacture Co.Ltd.of Kelamayi,Xinjiang 834034,China)
Abstract:【Objective】 The theoretical basis can be provide for the design of semi-mounted combined cultivating machine.【Method】 In this study,combined cultivating machine unit 1ZL-7.2 was taken as the object to analyze its turning process.【Result】In order to obtain the basic condition which could get the minimum turning radius.The key points of design are understood clearly for semi-mounted rack.
Key words:combined cultivating machine;semi-mounted;turning radius
通信作者:卢勇涛,男,副研究员,硕士,研究方向为农业机械设计与试验.E-mail:nkylyt@163.com
基金项目:农业科技成果转化资金项目(200365110000608);新疆农垦科学院科技引导计划项目(YYD2010-3).
收稿日期:2015-03-25;修回日期:2015-12-15
中图分类号:S 223.1+9
文献标志码:A
文章编号:1003-4315(2016)02-0144-05
第一作者:曹肆林(1982-),男,副研究员,硕士,研究方向为农业机械设计.E-mail:csl405240@sohu.com
