时滞切换系统的稳定性
2016-06-15熊文真
赵 娜,熊文真
(信阳职业技术学院,河南 信阳 464000)
时滞切换系统的稳定性
赵娜,熊文真
(信阳职业技术学院,河南 信阳 464000)
摘要:目的针对时滞切换系统中一类具有时变时滞的线性切换系统在各种不同控制与输入状态环境下自身所具备的不同时滞情况,重点分析其系统的稳定性状态。方法主要利用Lyapunov函数以及Halanay微分不等式来考虑,分析该类具有时滞特性的切换系统稳定性的基本问题。并通过实验模拟,选取一种基于时滞切换系统的串联式混合动力汽车来进行验证。结果通过模拟实验,基本印证了在该系统内部结构中,它的动态行为远比其它类系统要更为复杂化。造成这一局面的原因就是切换系统同时具备着其它系统都有的不确定性和时滞现象,以及其特有的切换机制,在这种切换机制的带动之下,能够最大效应地与上述提到的现象之间相互作用。结论汽车工作状态表现为小负荷时,汽车驱动电动机是一种电池控制下的状态;汽车工作状态表现为大负荷时,其发动机带动发电机发电+电池共同驱动整个电动机。
关键词:切换系统;混杂系统;时滞现象;切换机制
0引言
切换系统主要是一个系列的连续或者离散状态下的子系统,以及协调这些子系统之间所起到的切换效果规则的混合系统。近些年来,国内外控制界的专家学者一直在讨论、研究切换系统问题。在国内,已经取得了大量的研究成果,其中最主要、最为关键的几个小领域分别包括对其稳定性的研究、能控性的研究、能观测性的研究以及切换镇定等方面,在这里也可以将其(切换系统)定义为一种复杂形态下的变结构系统,本文结合混合动力汽车及其系统的设计进行研究。
1时滞切换系统的稳定性
关于切换系统的研究也是国内外数学领域的一个重点研究项目、课题。通常情况下,在数学研究领域,对于切换系统的描述主要表现为:
(1)
在(1)式中,x(t)主要表示切换系统中的状态向量[1];y(t)主要表示切换系统的测量输出;而δ(t)表示的是分段光滑切换信号,它在整个系统当中起到的功用就是决定并控制着在切换时刻相应的子系统的切换顺序,在一定程度上抑制、避免了顺序错乱现象的发生[2]。
假设在切换系统中,设定I为系统的充分光滑g(t)的非线性函数[3],而当δ(t)=i时,在I={1,2,...,m}内,g(t)作为第i个子系统被激活,即此时的fi,gi,i∈I是δ(t)的非线性函数,进而得出演变后的函数线性模型。
(2)
其中,{Ai,Bi,Ci,i∈I}是该线性模型适当维数的常值矩阵;而其中的x(t),y(t),u(t)分别表示切换过程中的一种状态、输出及输入向量。
时滞与切换是影响系统指数稳定性的重要因素[4],它们二者之间在复杂的动力学行为当中,通过相互之间的耦合,使得整个切换系统内部的若干个子系统在这种复杂的切换信号运行模式驱动下,构成了为其服务的动力学系统。在日常生活工作的实际应用过程中,对于这种时滞现象的出现是普遍存在着的,例如网络控制系统、大型电网通讯系统、机械传动系统等。人们一般将其中带有明显时滞的切换系统称之为“时滞切换系统”。对其所要求的稳定性控制,又可划分为2个层次面,分别是时滞独立稳定与时滞依赖稳定[5]。其中,关于时滞独立稳定,主要就是指整个切换系统在工作运行过程中,系统内部的稳定性与时滞没有任何关联上的稳定,而其中的时滞依赖稳定则是指在整个切换系统中,系统的稳定性与时滞存在着或多或少关系的稳定性。
根据(1)式与(2)式的表达,将时滞切换系统表达出来:
假设时滞切换系统为集合Z,其中包括着m个子系统,Z1、Z2、Z3、Z4、Z5…Zm。得出该系统的线性函数方程组:

(3)
其中,m表示自然数;τ表示常数,当τ>0时,表现为时间滞后量[6];i∈T={1,2,3,…,m};其中的x(t)代表的是x(t)∈Rn为系统在切换过程中的一种状态,例如,x(t-τ)∈Rn表示系统在(t-τ)时刻下的一种状态,从而在计算处理过程中就得出一种系统矩阵集合的定常矩阵Ai∈Rn×n(系统矩阵),此时,Ø(t)表示时滞切换系统的初始状态。例如矩阵集合Z,{Z1,Z2,Z3,…,Zm}。
2实例研究
本文基于应用实例对上述提出的问题进行阐述,并对假设的系统稳定性分析进行验证。重点选取了现实生活中的工程实例进行分析——混合动力汽车。
在混合动力汽车领域,由于当前国内人口处于膨胀状态,再加上工业化规模与进程的不断加速,进而对整个地球生态资源、环境、能源的消耗与破坏程度不断加剧,最终致使人类能够可利用到与开发到的资源能源极度缺少,同时这些对子孙后代都是非常不公平的,本文基于当前这种局面,针对混合动力汽车的发展,提出一种基于时滞切换系统下的混合动力汽车的车载管理控制系统。
目前在国内,关于切换系统的研究所使用到的方法有很多种,总体来看主要涵盖包括了凸组合技术、完备性条件、停留时间、平均停留时间及其相关的函数技术,其中最为突出也是应用最为广泛的就是LMI方法。
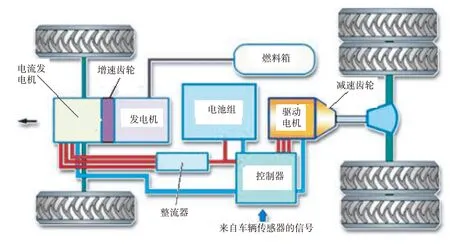
图1 一种基于时滞切换系统的串联式混合动力汽车
如图1所示,通常情况下,汽车的动力系统在工作运行的过程中,包括2种不同的情况,分别是其处在大负荷和小负荷的状态下。
①汽车工作状态表现为小负荷时,此时如所示的汽车驱动电动机是一种电池控制下的状态。②汽车工作状态表现为大负荷时,正如图1所示,其发动机带动发电机发电+电池共同驱动整个电动机。
在这里,将①和②定义为集合M中的2个子系统,设定σ(k)∈M={1,2},主要表示的是各个子系统在工作运行过程中的切换顺序。
将其转化为切换线性系统,对于前面提到的2个子系统M1、M2,应表示为:
根据矩阵模型得出与之相对应的(子系统)状态变化轨迹图,如图2、图3所示。
图2和图3分别表示M1、M2 2个子系统在整个时滞切换系统中的状态轨迹,从中能够明显看出,2个子系统(M1,M2)在切换系统中处于稳定的状态[7]。

图2子系统的M1状态轨迹图3子系统的M2状态轨迹
针对上述展示的子系统M1、M2的状态轨迹,其中所运用到的相关设计切换规则为:
(4)
(5)
依据(4)和(5)式的表达,能够进一步得出子系统M1/M2的状态轨迹在不同状态之下的稳定程度。详见图4、图5。
图4 切换规则稳定的系统轨迹(指数稳定性) 图5 切换规则不稳定的系统轨迹(指数稳定性)
当出现(4)这种情况,充分表明了该系统在任意初始条件之下的状态都属于稳定的。如图4所示。
当出现(5)这种情况时,也就是指系统中的切换规律,此时,该系统在任意的初始条件之下,表现出来的工作状态都是不稳定的,可以通过图5来了解其基本的状态轨迹。
3结论
一般情况下,切换系统(switchedsystem)都至少有2种或者2种以上不同的特性行为,当然这也是它们自身所表现出来的动态与事件行为,就如同图1所展示的电子系统一样,它正是在连续动态行为以及离散事件相互之间的影响作用之下的所产生的复杂行为。本文基于时滞切换系统的(状态)稳定性及其相关要素进行了探讨与分析,重点构建了基于状态指数稳定性分析的线性规划矩阵模型。对于线性切换系统以及内部各子系统的基本结构特征,通过公共二次型Lyapunov函数证明了其存在性判断依据。通过LMI方法的运用,在验证其稳定性充分条件的基础上,所得到的结果基本是以一种常态下的线性矩阵不等式形式来展现出来,这样就非常方便后续计算机操作的便捷实现。
参考文献:
[1]翟雷厚,傅希林.变分Lyapunov函数方法与脉冲时滞切换系统的稳定性[J].科学技术与工程,2009,9(04):829-831,841.
[2]曲袁超.时滞切换系统的稳定性分析[D].沈阳:沈阳师范大学,2012.
[3]范海龙,单妍炎.一类非线性时滞切换系统的稳定性分析[J].内蒙古工业大学学报:自然科学版,2014,(04):251-253.
[4]张亚婷,闻继伟,彭力,等.基于N步不变集的时滞切换系统的饱和控制[J].计算机与应用化学,2014,(09):1085-1090.
[5]刘钦文.随机时滞切换系统的稳定性分析与控制[D].杭州:杭州电子科技大学,2014.
[6]肖会敏,赵林,王春花,等.不确定时滞切换系统的鲁棒滑模控制[J].控制理论与应用,2011,28(11):1621-1626.
[7]方志明,向峥嵘,陈庆伟,等.一类时滞切换系统的输入-状态稳定性分析[J].控制与决策,2011,26(09):1327-1332.
[责任编辑:冯浩英文编辑:刘彦哲]
Stability of Switched System with Time Delay
ZHAO Na,XIONG Wen-zhen
(Xinyang Vocational and Technical College,Xinyang,Henan 464000,China)
Abstract:ObjectiveSwitched system is an important class of hybrid systems.Based on the experimental study of the stability of time delay switched system,for the one system with variable time-delay switched linear systems under various control and input to state the environment itself with the different time delays,this paper focuses on the analysis of the stability condition of the system.MethodsBy using Lyapunov function and Halanay differential inequality,the basic problems of the stability of time-delay switched systems were analyzed.And simulation experiments were conducted to verify a series hybrid electric vehicle based on Switched Systems with time delay.ResultsThe simulation experiments verified that in the inner structure of this system,dynamic behavior was far more complicated than other systems.The reason was that the switched systems had both the uncertainties and delays in other systems as well as its unique switching mechanism.Under this switching mechanism,it could interact with the phenomenon above mentioned with the maximum effect.Conclusion1.When the automobile works with a small load,the car driving electromotor is under a state of the battery control.2.When the automobile works with a heavy load,the electricity from the generator and the battery drive the electromotor together.
Key words:switched system;hybrid systems;time delay;switching mechanism
作者简介:赵娜(1981-),女,河南驻马店人,信阳职业技术学院讲师,硕士,研究方向:复杂系统。
中图分类号:F 721.7
文献标识码:A
DOI:10.3969/j.issn.1673-1492.2016.03.002
来稿日期:2015-12-24