基于椭球假设的加速度计非正交误差角测试
2016-06-13翟子雄张丕状
翟子雄, 张丕状
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
基于椭球假设的加速度计非正交误差角测试
翟子雄, 张丕状
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
摘要:针对现有三轴加速度计非正交误差角测试方法成本高、现场测试能力不足以及对加速度计测试位置精度要求高的问题,提出一种基于椭球假设的现场无依托测试方法。在只考虑三轴加速度计非正交误差角因素下,建立了三轴加速度计误差模型。实验结果表明:采用椭球假设现场测试方法可以不依赖外部辅助设备,通过绘制椭球的圆球程度可以直观观察到非正交误差角对加速度计的影响,同时可以对加速度计非正交误差角进行补偿。
关键词:加速度计; 非正交误差角; 椭球假设
0引言
三轴MEMS加速度传感器以其低成本、低功耗、小型化的优势在航天器、导弹、机器人的姿态测量中已得到广泛的应用[1~3]。理想情况下,加速度传感器的3个轴是完全正交的,但其敏感轴通常会偏离正交坐标系微小的角度[4],从而产生非正交误差。加速度传感器的非正交误差角将影响姿态精度,因此,需要对加速度传感器进行测试与校正,研究其非正交误差角对真实加速度的影响,这样以利于对加速度传感器的测量值进行补偿,提高姿态测试精度。
传统的加速度传感器测试需要昂贵的位置姿态测量仪器,如转台,测试工作只能在实验室里进行,不适合非实验室环境下使用[5]。文献[6]利用16位置翻转法对加速度传感器进行测试,该方法对不同位置时的姿态角精度要求较高,姿态误差会大大影响加速度传感器误差参数的计算精度。
针对传统测试方法成本高、现场测试能力不足以及对传感器测试位置精度要求高的问题,本文提出一种基于椭球假设的三轴加速度传感器测试方法对其非正交误差角进行测试研究,数据采集时只需要传感器姿态在三维空间大致均匀分布即可。
1加速度传感器非正交误差角模型
当仅考虑加速度传感器非正交误差而忽略加速度传感器的其他误差时,假设加速度传感器z轴和正交坐标系的zm轴完全重合,其它两轴与正交坐标系的夹角分别为α,β,γ,如图1所示。
非正交误差可表示为

(1)
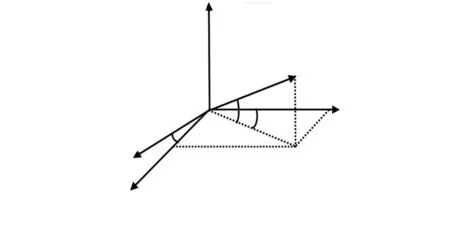
图1 三轴加速度计非正交误差角Fig 1 Non-orthogonal error angle of three-axis accelerometer
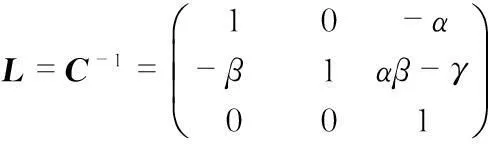
通常,厂家提供的三轴加速度传感器非正交误差角度小于0.5°,因此,可以对式(1)进行化简。只考虑三轴加速度传感器的非正交误差角影响,则真实加速度ge和测量值gm之间的关系如下
ge=L·gm.
(2)
2椭球拟合法
三轴加速度传感器坐标系O-xbybzb与地理坐标系O-xgygzg关系如图2所示,重力矢量g垂直向下,θ,φ分别表示载体的俯仰角和滚转角。某姿态下加速度传感器的测量值为A=[ax,ay,az]T,重力矢量在加速度传感器各轴的分量为
Ag=g·[-sinθsinφcosθcosφcosθ]T.
(3)
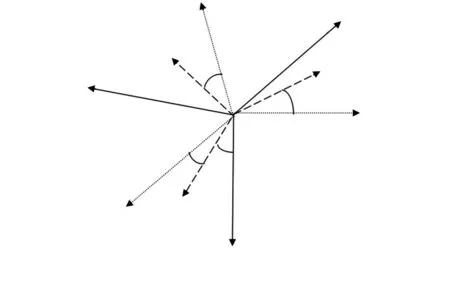
图2 三轴加速度传感器坐标系与地理坐标系示意图Fig 2 Three-axis acceleration sensor coordinate system and geographical coordinate system diagram
在无误差的理想情况下,测量值A满足下述方程
AT·A=(1gn)2.
(4)
式中测量值A的轨迹是一个以1 gn为半径的重力圆球面,实际由于加速度传感器的三轴存在非正交误差角,传感器输出轨迹会畸变为椭球面。对式(2)取ge模的平方可得

(5)
(6)
一般的二次曲面方程可表示为如下形式
ax2+by2+cz2+2fyz+2gxz+2hxy+2px+2qy+2rz+d
=0.
(7)

定义
V=[a,b,c,f,g,h,p,q,r,d]T,
(8)
则拟合椭球到测试点的问题可转化为如下约束问题
(9)
也可表示为
(10)

C1=
(11)
(12)
引入拉格朗日算子,则式(10)可改写为
(13)
已经证明上式有唯一解[7],因此,可唯一确定椭球系数向量V。
根据椭球系数可以求出椭球的半轴长度和非正交误差角。
2.1椭球的半轴长度
在获得椭球系数后,可定义对称系数矩阵T与平移向量F[8]
(14)
并构造变换
M′=QTM+R,
(15)
则可将式(7)转换为标准椭球形式
(16)
其中,旋转矩阵Q为对称系数矩阵T的特征向量,且Q和向量R满足
T=QWQT,
(17)
R=-(2W)-1QF,
(18)
式中W为对称系数矩阵T的特征值构成的主对角阵。
椭球的各半轴长度可得
(19)
2.2加速度传感器的非正交误差角度
根据椭球系数,利用解析法即可求出非正交误差角度


3实验结果与分析
为了验证上述椭球假设法对三轴加速度传感器非正交误差角的测试效果,将三轴加速度传感器固定在三自由度转台上,根据文献[9]中的等夹角均匀分布选取20个姿态采集三轴加速度传感器数据作为测量值。利用椭球拟合法求出半轴长度绘制出的椭球如图3所示,并求出加速度传感器非正交误差角,利用式(2)对加速度传感器的误差进行补偿,补偿结果如图4所示。
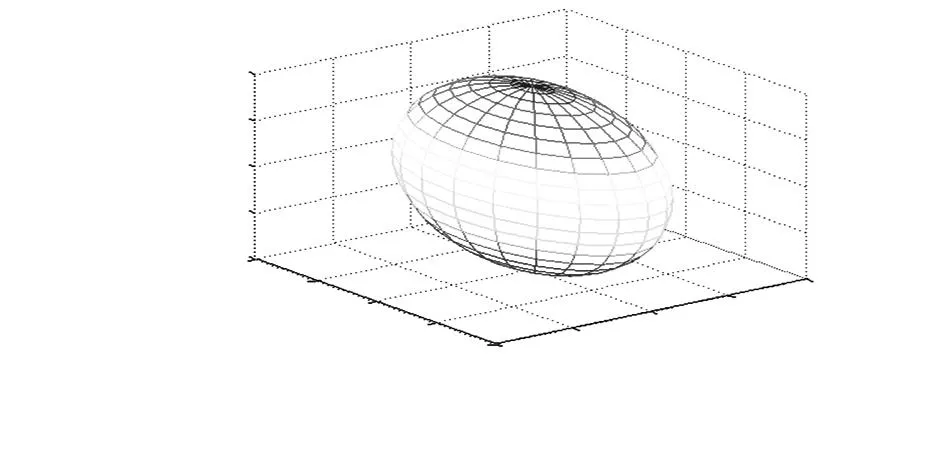
图3 测量数据椭球曲面Fig 3 Ellipsoid surface of measurement data
通过绘制椭球的圆球程度,可以判断出三轴加速度传感器的非正交误差角对加速度真实值的影响程度。
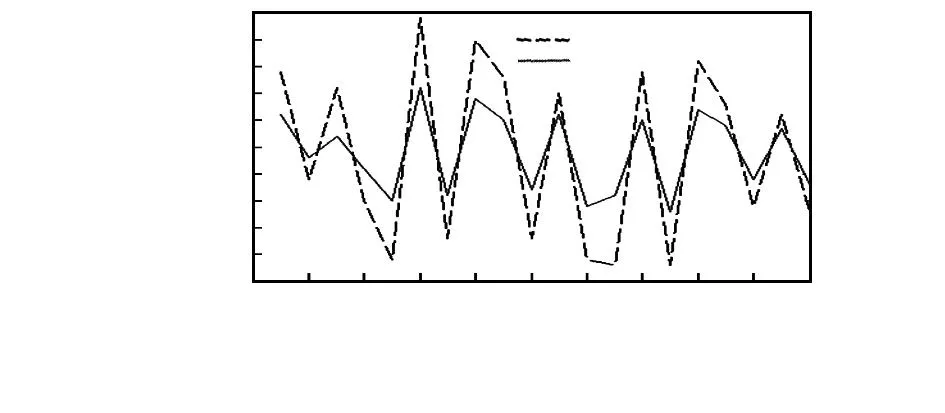
图4 三轴加速度传感器20组数据误差补偿Fig 4 Error compensation of 20 groups datas of three-axis accelerometer
图4中,加速度传感器最大绝对误差由校准前的0.472 2m/s2减小到0.211 7m/s2。
4结束语
本文分析了三轴加速度传感器当只考虑其非正交误差角时任意姿态下的误差模型,利用椭球假设法可以求出椭球的半轴长和非正交误差角,可以通过观察绘制椭球的圆球程度判断加速度传感器非正交误差角对传感器的影响程度,同时可以实现对三轴加速度传感器的非正交误差的补偿。该测试方法可在不需要外界参考基准下现场测试,操作简单易行。
参考文献:
[1]李智,汪地,杨浩,等.一种基于三轴加速度传感器的倾角测量装置[J].仪表技术与传感器,2013(8):31-32.
[2]杨淑洁,曾庆双,伊国兴.低成本无人机姿态测量系统研究[J].传感器与微系统,2012,31(2):15-18.
[3]李杰,洪惠惠,张文栋.MEMS微系统测量组合标定技术研究[J].传感技术学报,2008,21(7):1169-1173.
[4]陈弯弯,陈智刚,付建平.MEMS微型惯性测量组合标定[J].仪表技术与传感器,2014(12):37-38.
[5]蒋效雄,刘雨,苏宝库.高精度加速度计重力场标定试验方法[J].吉林大学学报,2010,40(1):287-292.
[6]FangJCH,SunHW,CaoJJ,etal.Anovelcalibrationmethodofmagneticcompassbasedonellipsoidfitting[J].IEEETransactionsonInstrumentationandMeasurement,2011,60(6):2053-2061.
[7]GanderW,GolubGH,StrebelR.Fittingofcirclesandellipsesleastsquaressolution[R].Zurich,Switzerland:ETH,1994:1-57.
[8]LiQ,GriffithsJG.Leastsquaresellipsoidspecificfitting[C]∥2004ProceedingsoftheGeometricModelingandProcessingconf,Beijing,China,2004:335-340.
[9]刘艳霞,李希胜,冯毅博,等.三轴磁罗盘标定位置分布的研究[J].仪器仪表学报,2013,34(3):684-690.
Accelerometer non-orthogonal error angle test based on ellipsoid hypothesis
ZHAI Zi-xiong, ZHANG Pi-zhuang
(Key Laboratory of Instrumentation Science & Dynamic Measurement,Ministry of Education,North University of China,Taiyuan 030051,China)
Abstract:To overcome the problems of high cost,insufficient on-site test ability and high precision demand for accelerometer test location that existing triaxial accelerometer non-orthogonal error angle test method has,a new test method based on ellipsoid hypothesis is proposed for on-site use.Considering only non-orthogonal error angle factors,an error model for triaxial accelerometer is established.Experimental results show that using proposed on-site method based on ellipsoid hypothesis without auxiliary equipment can realize accelerometer non-orthogonal error compensation and the impact of non-orthogonal error angle on accelerometer can be observed visually by the degree of sphere of drawing ellipsoid.
Key words:accelerometer; non-orthogonal error angle; ellipsoid hypothesis
DOI:10.13873/J.1000—9787(2016)03—0151—03
收稿日期:2015—05—20
中图分类号:V 249
文献标识码:A
文章编号:1000—9787(2016)03—0151—03
作者简介:
翟子雄(1990-),男,山西太原人,硕士研究生,主要从事惯性导航技术、信号与处理。