电动助力转向扭矩传感器设计*
2016-06-13吴志敏万茂松
吴志敏, 万茂松
(南京林业大学 汽车与交通工程学院,江苏 南京 210037)
电动助力转向扭矩传感器设计*
吴志敏, 万茂松
(南京林业大学 汽车与交通工程学院,江苏 南京 210037)
摘要:扭矩传感器作为电动助力转向(EPS)的传感元件,对转向的精确性至关重要。介绍了一种EPS扭矩传感器设计,主要通过霍尔元件采集磁通量的改变转换为电压,此电压值传送到控制器,控制器根据此电压值转换为扭矩值并依此计算出助力值,此外,还可以根据采集到的扭矩信号达到诊断功能。
关键词:扭矩传感器; 电动助力转向; 磁感应强度
0引言
汽车电动助力转向(electrical power steering,EPS)系统已成为汽车转向系统的发展方向,汽车EPS直接由电机提供助力,省去液压助力转向系统所必需的动力转向油泵、软管、液压油、传送带等装置,既节省能量又保护环境,而且,装配灵活、调整简单、高效率、路感好以及回正性强,在多种状况下都能提供助力。EPS主要是依靠扭矩传感器传来的信号来计算出所需要的助力值[1,2],因此,扭矩传感器信号对电机输出扭矩值起决定性作用,如何准确地将方向盘扭矩信号传送到控制器中变得尤为重要。
本文提出了一种EPS扭矩传感器设计,能有效地反映方向盘力矩的大小。
1EPS结构与原理
EPS主要由转向传感器、车速传感器、机械转向助力、助力电机以及控制器组成。驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向和转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转矩电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩[3],从而产生辅助动力,如图1所示。汽车不转向时,电子控制单元不向电动机控制器发出指令,电动机不工作。
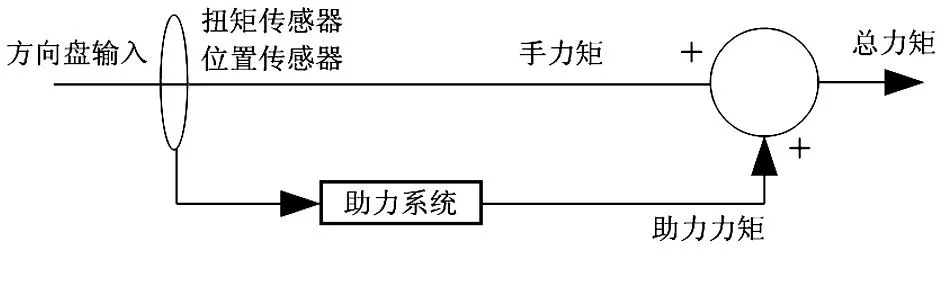
图1 EPS转向控制图Fig 1 Steering control diagram of EPS
2EPS扭矩传感器结构与原理
方向盘扭矩传感器主要作用是向EPS助力算法提供代表输入轴扭矩的信号。该扭矩传感器主要由上转子、下转子、扭杆、传感器支架和定位垫圈组成,如图2。
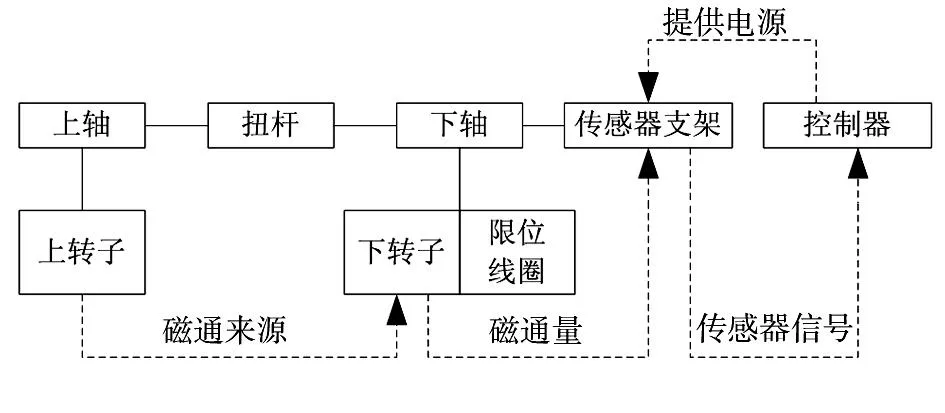
图2 扭矩传感器结构图Fig 2 Structure diagram of torque sensor
2.1上下转子与传感器支架
上转子由永磁铁组成,固定在上轴上,主要是提供磁场。下转子由磁环和注塑在一起的上下两片导磁钢组成,固定在下轴上,每个导磁钢各有6个导磁头,主要功能通过上导磁钢的导磁头把相同磁极的磁力线导到同一片导磁钢上(有6对磁极等角度分布在360°内,作用等同于1对导磁头对应1对磁极的状况),如图3所示。

图3 上下转子结构图Fig 3 Structure diagram of upper rotor and lower rotor
上转子压入下转子中,每对磁极的中间位置对应一个导磁钢探头,当没有手力矩时,上下导磁钢之间磁感应强度为零,如图4所示,扭矩传感器T1,T2未检测到磁感应强度的变化,故霍尔元件没有电压输出。
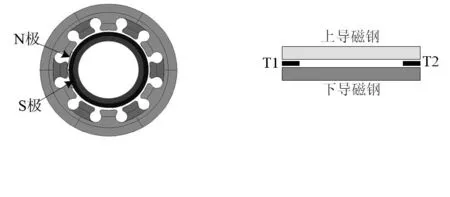
图4 无手力矩时磁极分布图Fig 4 Pole distribution map without handwheel torque
当向右转动方向盘时,经过上导磁钢的N极磁力线会增多,经过下导磁钢的S极磁力线会增多,如图5所示,T1,T2会感知到磁感应强度的变化。
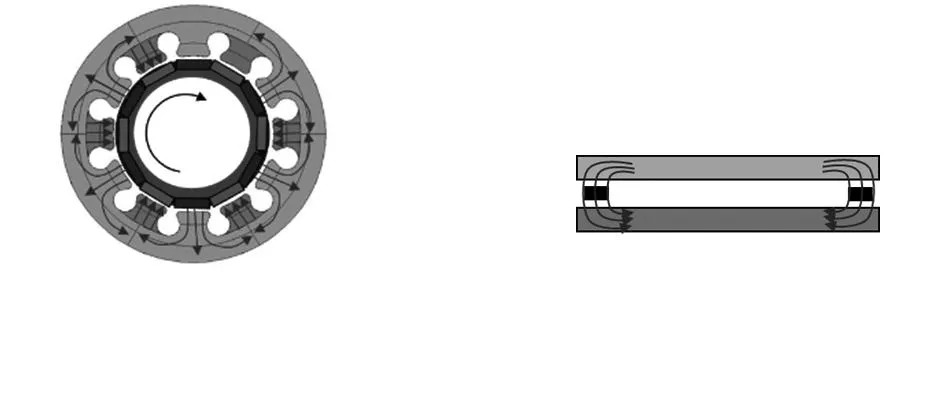
图5 右打方向盘时磁极分布图Fig 5 Pole distribution map while turningsteeling wheel to the right
当向左转动方向盘时,经过上导磁钢的S极磁力线会增多,而经过下导磁钢的N极磁力线会相应增多。如图6所示,T1,T2会感知到相应变化。
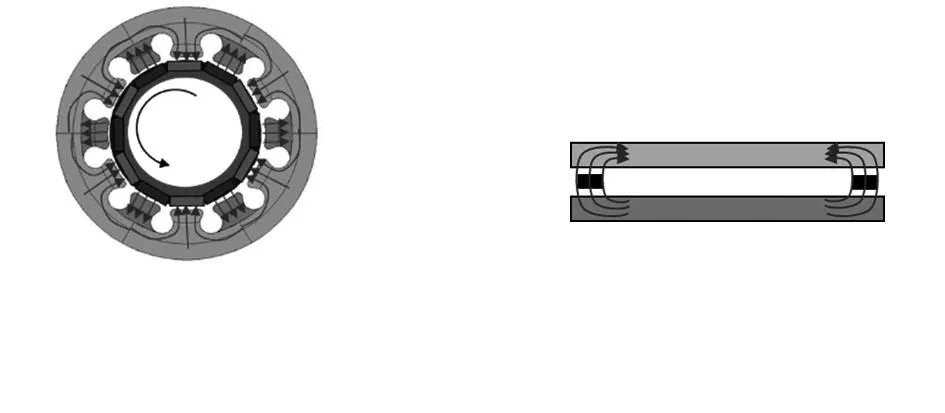
图6 左打方向盘时磁极分布图Fig 6 Pole distribution map while turningsteeling wheel to the left
用T1-T2所得到的电压值,这个值被送到控制器。通过控制器转换为对应的扭矩值,控制器根据它输入扭矩来判断需要提供多少助力,再给马达提供电压来实现顺逆时针的助力。而用T1与T2相加所得的信号作为诊断信号,用于检测T1或者T2的信号丢失,此信号将一直处于±5 V公差之间,如图7所示为理想状况的T1,T2状态。
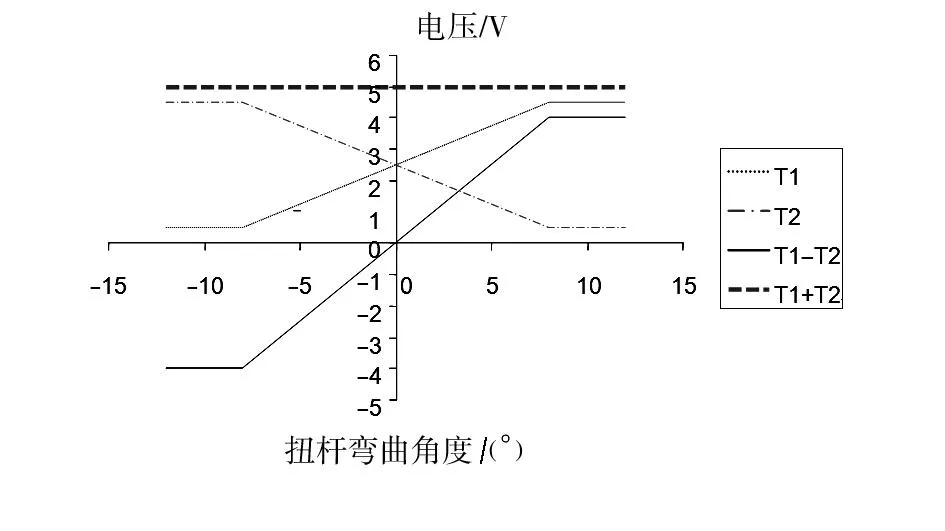
图7 T1,T2信号Fig 7 Signal of T1 and T2
EPS扭矩传感器主要检测加在方向盘的力矩,然后传递给控制系统以计算所需的助力。扭矩传感器是一种非接触式角位移传感器,它将输出通过扭杆装置连接在一起的上下轴之间的相对变化角,打方向盘时,手力矩驱动上下轴之间有相对转角,位置量为扭杆刚度。上下轴的相对位移对应的就是上下转子的相对位移,当没有相对位移时,下转子的上下导磁钢的探头都是处在S,N磁极中间位置,即磁感应强度零位;当有相对位移时,会引起上导磁钢探头接近S极,下导磁钢接近N极。磁力线N极沿着上导磁钢探头进入上导磁钢,再从上导磁钢进入下导磁钢,然后从下导磁钢回到S极,形成这样一个封闭回路。处于上下导磁钢之间的霍尔元件此时监测到磁感强度的变化。
传感器支架的作用是将霍尔元件正确固定在预定位置上,以30°或者150°分布,如图8所示。扭杆装置主要是将方向盘侧传递过来的扭矩转换成相对角度信号而被扭矩传感器检测到。限位线圈主要是将下转子保持在安装位置。由于上下转子与下轴是塑料花键压接在下轴刚体上,下转子花键过盈塑料变形后容易向上滑脱。

图8 传感器支架结构图Fig 8 Structure diagram of sensor holder
2.2霍尔元件
采用线性霍尔元件,利用霍尔原理,随着磁场变化,输出电压与垂直于元件磁场矢量呈线性正比变化[4]。不仅可以放大霍尔电压,并且可以补偿温度和内部电阻变化对于输出的影响[5,6]。如图9所示为霍尔元件基本电路图。
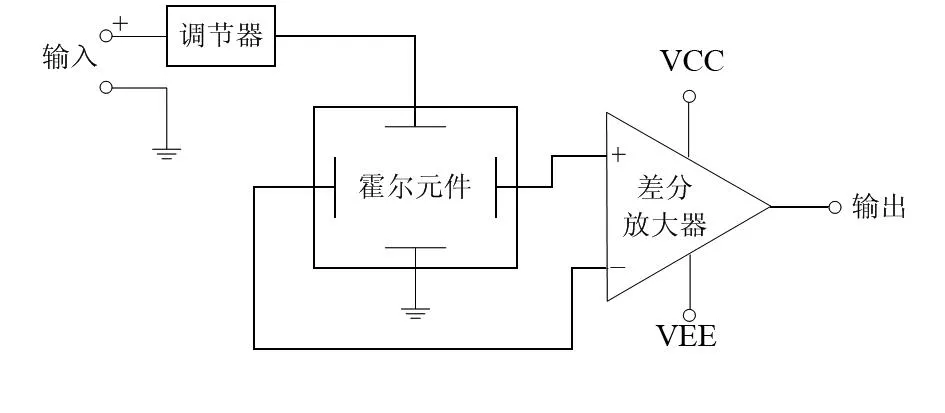
图9 基本传感器线路图Fig 9 Basic sensor wiring diagram
2.3扭杆装置
输入上轴与输出轴之间主要依靠一种柔性材料链接,即为扭杆装置,如图10所示。扭杆有一定的扭转刚度和磁滞特性。扭杆细齿形渐开线花键端部结构外直径d0=(1.15~1.25)d,长度l0=(0.5~0.7)d,为了避免过大的应力集中,应采用过度圆角。扭杆的有效长度为l,d为扭杆有效长度直径。
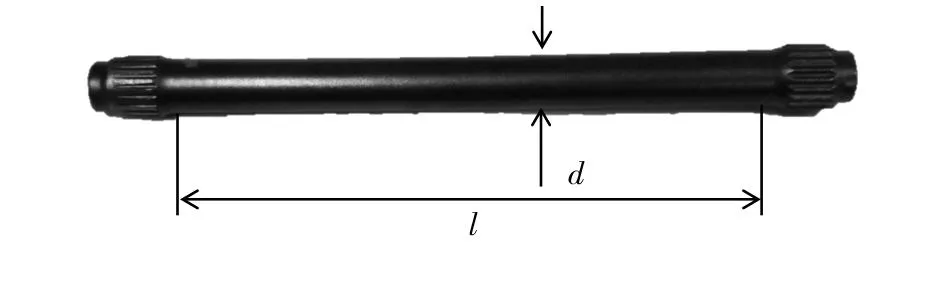
图10 扭杆结构图Fig 10 Structure diagram of torsion bar
扭杆的扭转刚度k是扭杆的重要物理量,当其受到扭矩T时,其扭转的切应力τ和变形角φ分别为
(1)
(2)
式中Ip为惯性矩,Zi抗扭截面系数。
其扭转刚度为
(3)
若扭杆材料为SAEJ404,Grade4142号钢,但其最小抗拉强度为1 032MPa,硬度为34—40HRC,屈服强度为896MPa。
3实验测试
进行了转向扭矩功能实验测试,图11所示为扭转角与扭矩关系曲线,其曲线的斜率k值为扭转刚度。
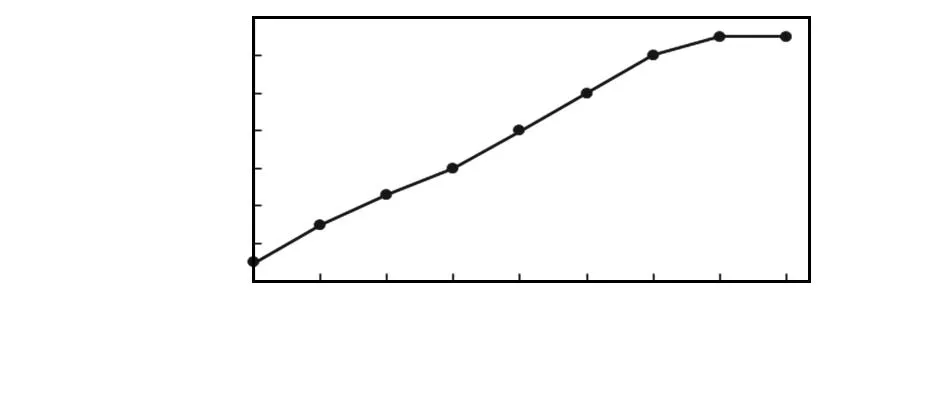
图11 扭转角与扭矩关系曲线Fig 11 Curve of relationship between torsion angle and torque
4结论
EPS扭矩传感器有很多种,光电式虽然响应速度快,测量精度高,但是对于光码盘的设计要求特别高[7]。电位计式虽然成本较低,但是测量精度不高,使用寿命短。采用此种非接触式扭矩传感器不仅精度高,受环境影响小,而且符合现今发展趋势[8]。采用该扭矩传感器的设计,不仅可以很好地监测扭矩信号,而且具有自诊断功能,更能够高效地反映EPS的状态,对于转向系统非常有效。
参考文献:
[1]徐赵坤,赵燕.电位计式EPS扭矩传感器的设计与研究[J].中国仪器仪表,2004(12):28-30.
[2]卢尚斌,孟广耀.电动助力转向系统中的转矩传感器设计[J].机械设计与制造,2006(6):25-26.
[3]Tokumoto Y.Development of next-generation steering sensor for electric power steering[J].Engineering Journal: English Edition,2004,165E:20-24.
[4]方玉良.用于EPS的电磁感应式扭矩传感器研究[D].哈尔滨:东北林业大学.2014:11-12.
[5]Yoshida K.Development of custom IC for EPS torque sensor[J].KOYO Engineering Journal: English Edition,2002,160E:48-51.
[6]Doriben H T.Mechatronics and drive-by-wire systems advanced non-contacting position sensors[J].Control Engineering Practice,2003(11):1991-1997.
[7]李志鹏,方玉良,杨凤英,等.电动助力转向系统扭矩传感器研究现状与发展趋势[J].传感器与微系统,2013,32(8):11-13.
[8]林逸,施国标.汽车动力助力转向技术的发展现状与趋势[J].公路交通科技,2001,18(3):79-81.
Design of torque sensor for EPS*
WU Zhi-min, WAN Mao-song
(College of Automobile and Traffic Engineering,Nanjing Forestry University,Nanjing 210037,China)
Abstract:As sensing component of electrical power steering(EPS), torque sensor is very important for accuracy of steering.A design of EPS torque sensor is introduced,which collects flux change and converts it into voltage through Hall component,then the voltage value is sent to controller,then converted torque value,calculate power value according to the value converted by the voltage,besides diagnostic function can be achieved by torque signals.
Key words:torque sensor;electrical power steering(EPS);magnetic induction intensity
DOI:10.13873/J.1000—9787(2016)03—0099—03
收稿日期:2015—05—29
*基金项目:江苏省普通高校学术学位研究生科研创新计划资助项目(KYLX—0886)
中图分类号:TP 212.1
文献标识码:A
文章编号:1000—9787(2016)03—0099—03
作者简介:
吴志敏(1991-),江苏高邮人,硕士研究生,主要研究方向为汽车电子控制技术。
