一种改进的UAV高度无缝融合导航方法*
2016-06-13李志敏赖际舟贾文峰
李志敏, 赖际舟, 贾文峰, 黄 凯
(1.南京航空航天大学 导航研究中心,江苏 南京 210016;2.陕西宝成航空仪表有限责任公司,陕西 宝鸡 721000)
一种改进的UAV高度无缝融合导航方法*
李志敏1, 赖际舟1, 贾文峰1, 黄凯2
(1.南京航空航天大学 导航研究中心,江苏 南京 210016;2.陕西宝成航空仪表有限责任公司,陕西 宝鸡 721000)
摘要:为了解决无人飞行器多机载高度传感器直接使用和切换导致的信号突变的问题,提出了一种基于微惯性器件、GPS、声纳、气压高度计的高度无缝融合方法。建立声纳和气压高度计误差模型,对其动态误差进行了分析和滤波预处理。采用基于增量的无缝融合方法获取高度变化估计值以修正气压高度。利用无迹卡尔曼滤波(UKF)方法将气压高度计、GPS和惯性导航系统信息进行有效融合获得精确的高度估计值。该方法考虑了各种高度传感器在动态环境下的误差特性,解决了模式切换带来的信号突变问题。飞行试验结果表明:采用该设计的方法系统具有较高的精度和可靠性。经过150 s飞行后,高度估计误差为0.470 7 m,能够满足无人飞行器飞行要求。
关键词:无人飞行器; 声纳; 气压高度计; 高度融合; 无迹卡尔曼滤波
0引言
飞行高度信息是无人飞行器(UAV)自主飞行的重要信息之一。受到飞行器载重和成本的限制,目前用于微小型飞行器的微型导航传感器一般精度较低。为提高其高度信息的准确性和可靠性,需依赖于多传感器信息融合导航技术[1]。
惯性导航系统(INS)误差随时间发散,且高度通道不稳定,需引入外部高度信息构成互补滤波器。全球定位系统(GPS)可获得三维位置信息,但其高度信息动态误差大,在低空或复杂环境下信号易丢失[2]。气压高度计结构简单、自主性强、短时精度较高,但输出易受环境因素影响[3]。声纳静态输出精度高[4],但其测量值受到环境干扰易发生突变,测量范围也有一定的局限性。
受到各个传感器自身特性和测量条件的限制,单一传感器的高度测量精度很难满足UAV的飞行要求,采用多传感器数据融合是提高飞行器高度测量精度的有效途径[5]。文献[6]采用联邦滤波方法对高度传感器、无线电导航系统和差分GPS系统进行数据融合,有效解决了GPS数据丢失的问题,但滤波计算需要获得迎角和侧滑角信息,对飞行器传感器提出了新的要求。文献[7]采用卡尔曼滤波器对气压高度计、GPS和线加速度信息进行融合,解决了文献[6]中迎角和侧滑角不可得的问题,但仿真验证忽略了传感器在动态环境下的误差特性。文献[8]采用多种高度传感器数据融合时,未考虑传感器测量模式切换所造成数据突变问题。文献[9]用渐变的加权平均法融合两种高度传感器数据,提高数据精度。但该方法没有考虑传感器本身的误差特性,在模式切换时只能起到一定的平滑作用,无法解决突变问题。
本文提出采用微惯性器件、GPS、声纳和气压高度计的多传感器信息融合导航方法获得高度估计,用于提高UAV高度信息的精度和可靠性。在高度传感器误差建模和预滤波的基础上,基于高度增量对声纳和气压高度计的信息进行无缝融合,从而解决因传感器模式切换带来的高度信息突变问题。将修正的高度和惯性/GPS导航系统数据进行无迹卡尔曼滤波(UKF)处理,获得精确的高度估计和其他导航信息。
1UAV机载高度传感器的误差分析与建模
1.1声纳静态误差分析与建模
声纳利用声波反射原理测距,测量距离s可表示为
s=vt/2,
(1)
式中s为待测距离,v为声波速度,t为传播时间。声纳的测量误差可分为随测量距离增大的误差和固定误差两类。因此,声纳的输出模型可以表示为
y=kx+b,
(2)
式中y为声纳输出距离,x为真实距离,k为一阶系数,b为固定距离误差。通过基于最小二乘法的曲线拟合处理实测数据能够获得声纳模型的待定系数,从而补偿声纳静态误差,提高测量精度。
1.2气压高度计静态误差分析与建模
气压高度计根据在地球表面附近大气压强随高度升高而降低的原理制成。视大气环境满足标准大气环境要求,则标准压高公式为

(3)
式中H为待求高度,p为气压计输出的气压值,R为宇宙气体常数,p0为海平面的大气压,H0和T0分别表示海平面的高度和大气温度值,L为大气温度梯度,参数数值详见文献[10]。由该计算公式可获得标准气压高度。
气压高度计输出误差主要来源于原理误差、传感器误差和环境干扰误差。
本文采用相对高度计算方法,以飞行器起飞场面为参照,计算相对高度。该方法避免了海平面参数修正法的复杂计算[10],能够有效避免原理误差,并补偿气压计零位误差。
2基于多信息的高度无缝融合方法设计
本文采用的基于惯性、GPS、声纳和气压高度计的UAV高度融合方案原理图如图1所示。
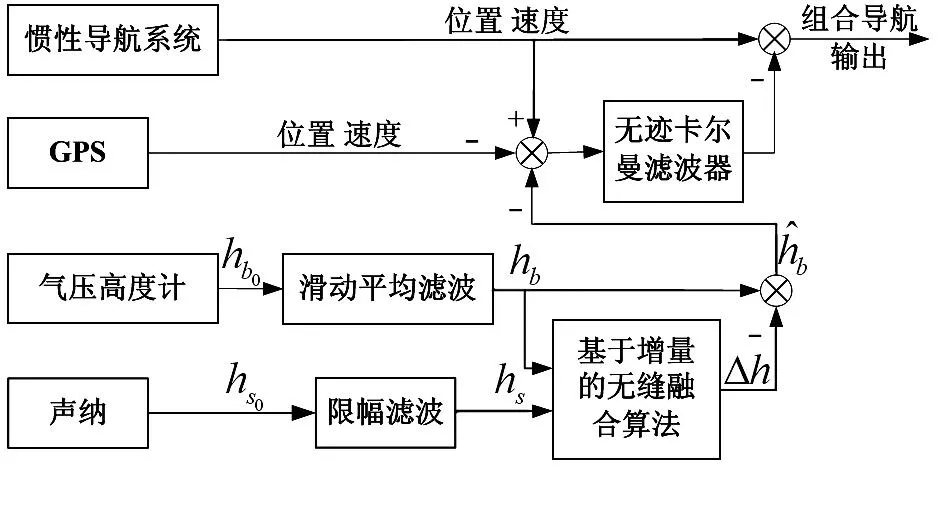
图1 高度融合方案原理框图Fig 1 Principle block diagram of height fusion scheme
对声纳和气压高度计原始输出分别采用限幅滤波和滑动平均滤波后,基于高度增量对两者数据进行无缝融合处理,从而提高测量精度,并克服由传感器切换导致的突变问题。最后将气压高度修正值与GPS、惯性导航系统输出进行UKF,获得精确的高度估计与其他导航信息。
2.1声纳/气压高度计基于高度增量的无缝信息融合
声纳的输出精度高,但量程范围小,而气压高度计特性与之相反。因此,充分利用两者的优点,有利于提高高度信息的精度和可靠性。对此,传统的处理方法是将两者信息进行加权平均,该方法在声纳量程到达上限进行切换时会出现数据突变值。
本文在对传感器数据滤波预处理以后,采用声纳和气压高度计输出增量的加权平均值实时修正气压高度,以实现高度数据的无缝融合,其计算方法如下

(4)
式中Δhbk和Δhsk分别为k时刻气压高度计和声纳输出的变化量;k时刻高度的变化量Δhk为两种传感器输出增量的加权平均;ws表示声纳高度权系数。这种算法能够充分利用两种高度传感器的输出信息,有效提高测量精度。与传统算法相比,该算法完全消除了传感器模式切换带来的信息突变,实现了平稳过渡。
2.2基于UKF的多信息组合导航系统实现
声纳和气压高度计输出经融合后得到精度较高的高度数据,作为外部高度输入,能够抑制惯性导航系统高度通道的发散。本节采用UKF,将惯性/GPS/气压高度信号进行融合,获得高精度的高度估计值和其他导航信息。
组合导航系统状态量X为载体的位置、速度、姿态,系统噪声W包括加表白噪声和陀螺白噪声,其方差阵为Q。系统状态方程详见文献[1]。
以GPS水平位置,声纳/气压计融合高度和GPS速度为量测量,构建系统量测方程为
Z=HX+V.
(5)
其中,H=[diag[111111]|06×3],量测噪声阵V的方差阵为R。

2)计算k-1时刻(2L+1)个Sigma点为
(6)
3)时间更新
(7)
4)量测更新
(8)
按照上述步骤进行迭代计算获得状态量的实时更新。
3飞行实验验证与数据分析
3.1声纳数据标定
对机载声纳模块进行标定实验,获得式(2)中的未知参数
y=0.99x+0.009 2.
(9)
利用上式对声纳的零位误差和标度因数误差进行修正。
3.2飞行试验验证
本文基于自主设计的四旋翼飞行器平台进行实际飞行试验。试验场景如图2所示。

图2 四旋翼飞行器飞行实验场景Fig 2 Flight experimental scene of quad-rotor aircraft
四旋翼飞行器平台搭载了惯性导航系统、GPS系统、声纳以及气压高度计。使飞行器分别在3 m和8 m左右采用定高模式飞行。若采用惯性/GPS松组合方案进行数据融合,获得的位置信息如图3所示。
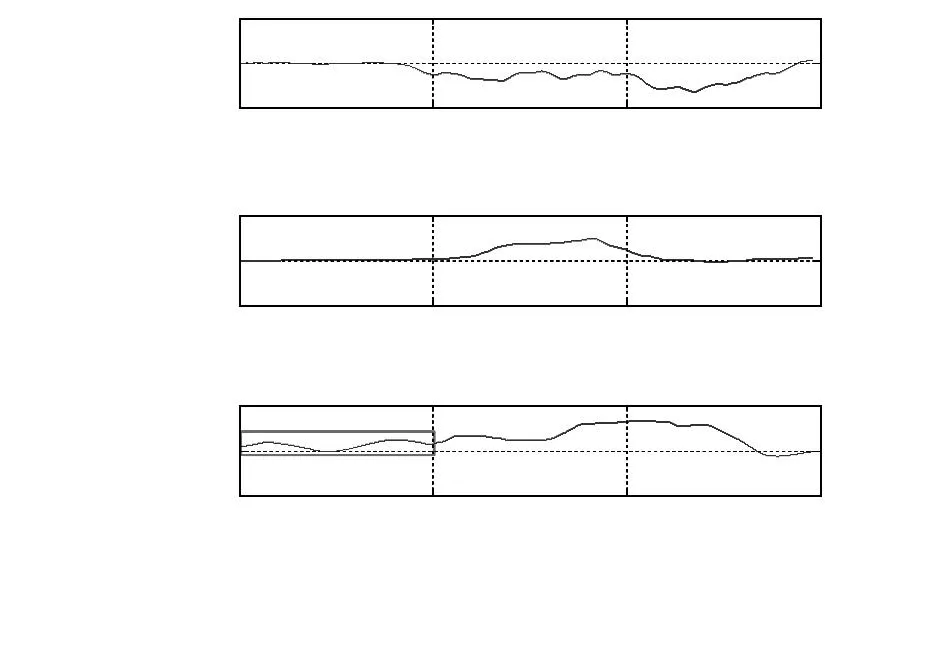
图3 惯性/GPS松组合位置输出曲线Fig 3 Position output curve of INS/GPS loose combination
图中方框标示部分为起飞前高度数据,高度误差为1~2m。由此可知,由于GPS输出高度误差大,直接影响融合信息精度,不能单独用于UAV的高度定位。
对预滤波处理后的声纳和气压计高度采用基于高度增量的加权融合算法,弥补声纳量程的制约和气压高度计误差较大的缺陷,其处理结果如图4所示。
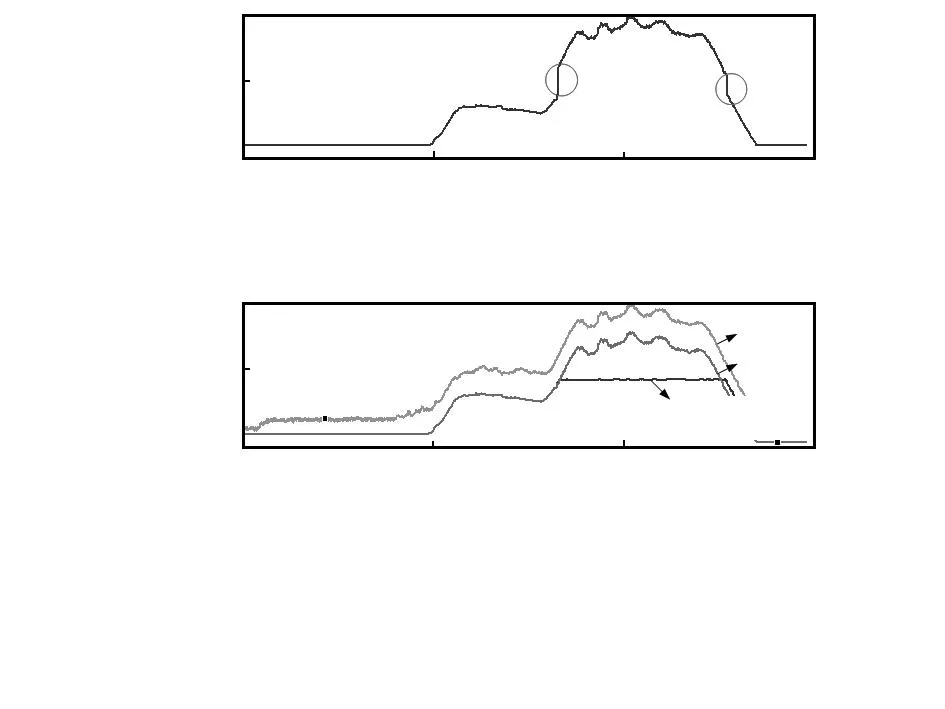
图4 声纳/气压高度融合曲线Fig 4 Fusion curve of sonar and barometric altimeter height
图4(a)采用传统的加权平均法处理声纳和气压高度计高度值。图中圆圈标示部分说明直接对两种传感器采用加权平均处理会在传感器切换时产生高度突变。图4(b)采用提出的基于增量的加权平均处理。由融合后高度曲线可知,该方法能够充分利用两种传感器在不同测量范围内
的优势,实现平稳切换,在全程内保持高精度的高度估计值。
用声纳/气压高度计融合高度与惯性/GPS组合导航系统进行UKF融合,滤波后获得的高度数据曲线如图5。

图5 无迹卡尔曼滤波处理后惯导系统高度输出曲线Fig 5 INS height output curve after UKF processing
由图可知,卡尔曼滤波器有效抑制了惯导高度通道误差的发散,对飞行器着陆静止后数据分析可知,绝对误差均值为0.470 7 m。能够满足UAV飞行的高度精度和稳定性要求。
4结束语
为满足UAV安全飞行的高程精度要求,本文提出了一种改进的多传感器高度无缝融合方法。该方法充分利用多传感器信息,考虑各个高度传感器误差特性,有效解决了传感器测量模式切换带来的突变问题,抑制了惯导系统输出信息发散,提高了高度数据的精度和稳定性。实际飞行测试数据处理结果表明:本文提出的高度估计方法在飞行器经150 s飞行后,高度估计误差为0.4707 m,能够满足UAV飞行要求。
参考文献:
[1]刘建业,贾文峰,赖际舟,等.微小型四旋翼飞行器多信息非线性融合导航方法及实现[J].南京航空航天大学学报,2013,45(5):575-582.
[2]Wang Jinling,Garratt M,Lambert A,et al.Integration of GPS/INS/ vision sensors to navigate unmanned aerial vehicles[C]∥International Conf on Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2008:963-970.
[3]雷旭升,李晶晶,郭克信,等.一种小型无人旋翼机高度信息融合方法[J].机器人,2012,34(4):432-439.
[4]赵海,张宽,朱剑,等.基于TDOA的超声波测距误差分析与改进[J].东北大学学报,2011,32(6):802-805.
[5]Foresti G L,Regazzoni C S.Multisensor data fusion for autonomous vehicle navigation in risky environments[J].IEEE Transactions on Vehicular Technology,2002,51(5):1165-1185.
[6]胡永红.数据融合方法在小型飞行器高度定位中的应用[J].计算机测量与控制,2006,14(10):1371-1373.
[7]浦黄忠,胡勇,王道波,等.无人机高精度容错高度测量系统设计[J].传感器与微系统,2007,26(8):84-86.
[8]郑智明,刘建业,钱伟行,等.卫星导航系统与气压高度计的信息处理与融合[J].应用科学学报,2010,28(3):277-282.
[9]禤家裕,裴海龙.一种小型无人机高度定位方法的研究与实现[J].自动化与仪表,2010,25(12):1-6.
[10] 郝振海.组合传感器仪表关键技术研究[D].南京:南京航空航天大学,2010.
[11] 刘建业,曾庆化,赵伟,等.导航系统理论与应用[M].西安:西北工业大学出版社,2010.
A modified seamless height fusion navigation method of UAV*
LI Zhi-min1, LAI Ji-zhou1, JIA Wen-feng1, HUANG Kai2
(1.Navigation Research Center,Nanjing University of Aeronautics & Astronautics,Nanjing 210016,China;2.Shaanxi Baocheng Aviation Instrument Co Ltd,Baoji 721000,China)
Abstract:To solve problem of data jitter caused by direct usage and switch of various altitude sensors on unmanned aerial vehicle(UAV),a seamless altitude fusion method is proposed based on micro inertial device/GPS/sonar/barometric altimeter.Error models for sonar and barometric altimeter are established,and dynamic errors are analyzed and preprocessed.With seamless fusion method,altitude variation is obtained to calibrate barometric height.To get more accurate altitude,data of barometric altimeter,GPS and inertial navigation system are effectively fused by unscented Kalman filtering(UKF) method.This method takes error characteristics of various height sensors into consideration,can solve jitter problem when modes switching.Flight experimental result shows that designed system has high precision and reliability after fly for 150 s,error of altitude estimation obtained by this method reaches to 0.470 7 m.It can meet flight requirement of UAV.
Key words:unmanned aerial vehicle(UAV); sonar; barometric altimeter; height fusion; unscented Kalman filtering(UKF)
DOI:10.13873/J.1000—9787(2016)03—0022—03
收稿日期:2015—07—02
*基金项目:国家自然科学基金资助项目(61174197);航空科学基金资助项目(2012ZC52045)
中图分类号:V 249.1
文献标识码:A
文章编号:1000—9787(2016)03—0022—03
作者简介:
李志敏(1991-),女,江苏南通人,硕士研究生,研究方向为惯性导航,多信息融合。