三相双PWM四象限交流电力传动系统仿真
2016-06-13黄敏瑶杨文焕候甜甜李登科
黄敏瑶,杨文焕,候甜甜,李登科
(上海理工大学 光电信息与计算机工程学院,上海 200093)
三相双PWM四象限交流电力传动系统仿真
黄敏瑶,杨文焕,候甜甜,李登科
(上海理工大学 光电信息与计算机工程学院,上海200093)
摘要传统的功率变换器由于整流环节不可控,而存在网侧功率因数低,谐波含量高等且应用范围有限,控制系统的电机转速稳定性与精确性较差,不能四象限运行问题。文中利用Matlab建立起双PWM变换器的交流调速系统模型并进行了仿真,利用矢量控制方法让电机四象限运行。系统的动态特性和静态均较好,改善了网侧功率因数低,谐波含量高等缺点,电机的转速稳定性与精确性也较好,验证了控制策略的可用性和控制器的有效性。
关键词PWM变换器;Matlab;交流调速;矢量控制
双PWM 变流器是由两个全控型器件为基础的电压源型变流器,背靠背连接构成,中间采用电容器做电压支撑。该装置拥有多项优点,比如变流器两侧的无功功率可单独控制,交流侧功率因数可调,输出谐波少,直流电压可控,能量双向流动等[1],因而其应用广泛,在风力发电,柔性直流输电,变频调速等许多领域都有其重要的参与[2]。在交流传动系统变频调速领域,传统控制策略控制性能差,尤其是参数时变、网侧和机侧独立控制、负载不确定性等增加了控制难度,交流传动系统的动、静态性能总需提高。在此运用矢量控制对两个变流器所需实现的不同功能分别设计了控制器,并且对变流器的整流环节的控制提出了新的控制策略。
1四象限交流传动系统工作原理
四象限交流传动系统主要由网侧PWM变流器(VSC1)、机侧PWM变流器(VSC2)、直流侧电容c等组成,通过产生SVPWM波控制变流器工作,从而产生电动机需要的三相电压。四象限交流传动系统主电路拓扑结构如图1所示,展现四象限交流传动系统运行状态与能量流向关系,VSC1和VSC2结构相同。
在四象限交流传动系统中,功率传输的方向决定了 PWM变流器工作状态的切换方式。具体分析如下:当能量由VSC1流向VSC2时,网侧系统向机侧系统提供能量,机侧PWM变流器工作在逆变状态,直流侧电压因电容放电而下降,为保持电压稳定,网侧PWM变流器VSC1工作于整流状态。当能量由VSC2流向VSC1时,机侧系统向网侧系统释放能量,机侧PWM变流器工作在整流状态,直流侧电压因电容充电而上升,为保持电压稳定,网侧PWM变流器VSC1工作于逆变状态[3]。在电磁转矩和转速都>0时,能量由电网经过网侧变流器、电容和机侧变流器等传递到电机,电机处于正转电动状态,工作在第一象限;电磁转矩<0,转速>0时,能量由电动机经过机侧变流器、电容和网侧变流器等回馈至电网,电机处于正转制动状态,工作在第二象限;电磁转矩和转速都<0时,能量由电网经过网侧变流器、电容和机侧变流器等传递到电机,电机处于反转电动状态,工作在第三象限;当电磁转矩>0时,转矩<0时,能量由电动机经过机侧变流器、电容和网侧变流器等回馈至电网,电机处于反转制动状态,工作在第四象限。由此实现能量的双向流动。
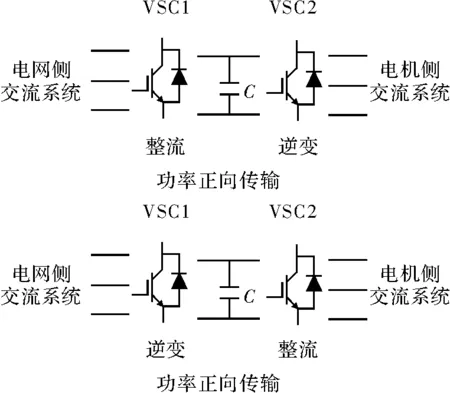
图1 四象限交流传动系统运行状态图
2双PWM调速系统建立
在双 PWM 结构,整流桥和逆变桥都采样全控的IGBT管控制,由于IGBT管的全控性可任意控制其关断,这样当出现能量回馈时,能进行快速关断,不会产生过电流,实现交流电机快速四象限运行。
本文采用电压源型PWM变流器,其可保持直流母线电压的稳定并使网侧电流波形为正弦波。同时使网侧功率因数为1或-1。当电机做电动机运行时,该变流器做整流器运行;当电机做发电机运行时,该变流器则作为逆变器讲电机发出的电能回馈到电网,根据三相VSR特性分析需要,可采用开关函数描述的一般数学模型。其主电路拓扑如图2所示,前端电网侧主要有电感、电路等效电阻R和PWM整流器。中间直流侧电容滤波,后端为PWM逆变器和异步交流电动机。

图2 双PWM变频调速主电路拓扑
其中交流侧包括电网三相交流电压ua,ub,uc、电感L、等效电阻R和交流电动机;功率开关管均为全控型,每一个均并联一个续流二极管;直流侧包括直流电容c、负载电阻RD和负载侧电压eD等。在工作状态时,三相VSR交流侧输入三相电压,功率开关管在PWM波的控制下开通或者关断,使三相VSR输出稳定的直流电压,电能消耗在负载电阻上,然后经逆变供交流电机运行[4-5]。
VSR中的同一桥臂的上下开关管不能同时导通,否则直通会损坏开关管,图2中当上桥臂的开关管关断的时侯,其对应下桥臂上的开关管必须是导通的,反之亦然。根据此规律定义开关管的开关函数为
(1)
由此得出VSR的8种开关模式,定义为sa,sb,sc,即000,001,010,011,100,101,110,11l这8种开关模式,其中有两个零矢量000和111。三相的分析中以a相为例,上桥臂导通,而下桥臂关断时sa为1,UaN=Udc,其中Udc为直流侧电压。上桥臂关断,而下桥臂导通时,那么sa=0,UaN=0。则B相与C相为UbN=sbUdc,UcN=scUdc。直流输出侧电流为idc=saia+sbib+scic,假设电网电压为稳定且对称的正弦波,并由KCL与KVL推出VSR在三相静止坐标系下的数学模型
(2)
从三相静止坐标系(a,b,c)向两相极坐标系αβ进行坐标变换,用通用矢量X来表示电流、电压等矢量,变换过程如下
(3)
得出VSR在αβ坐标系下的数学模型
(4)
另一方面,网侧电流整流后经PWM逆变器进行逆变流入交流电机侧,三相异步电机电压方程式如下
(5)
式中,P为微分算子;Ls为定子自感;LM为互感;LR转子自感;Rs为定子电阻;RR为转子电阻;usd、usq分别为定子电压的励磁分量和转矩分量;Isd、Isq分别为定子电流的励磁分量和转矩分量;Ird、Irq分别为转子电流的励磁分量和转矩分量[6]。电机转矩为
(6)
其中,Ω1为同步角频率,随变频调速改变;IAO为定子基波电流;f1电机供电频率,随变频调速改变;P为电机极对数;n为电机转速;RR转子折算电阻。
3控制策略及参数设定
3.1双闭环控制与矢量控制
针对电机转速精确性与稳定性较差这个问题,本文网侧PWM 变换器采用双闭环控制,主要结构包括电压外环与电流内环,电压外环主要用来控制三相VSR直流侧电压,而电流内环的主要作用未按照电压外环输出的目标电流指令进行电流控制,其中转矩电流解耦内环控制如图3所示。

图3 iq解耦内环控制结构图
矢量控制通过测量异步电机定子电流矢量,根据坐标变换原理进行磁场定向。然后分别对异步电机的励磁电流和转矩电流进行控制,励磁电流id与转矩电流iq,通过等效变换得到等效的三相交流控制电流ia,ib,ic进而可控制逆变电路[7]。电动机在工作状态时,测量到的三相交流信号可等效成两个互相垂直的直流电流,反馈回控制侧,用来修正励磁电流和转矩电流。在进行控制时,可使转矩电流只控制励磁电流,由此便可达到与直流电动机调速类似的控制效果[8-9]。控制模型如图4所示。

图4 矢量控制系统图
3.2参数设定

4仿真分析
在MatlabSimulink中建立系统仿真模型[3]如图5所示。

图5 系统仿真图
以正弦波为输入信号,并进行测量,相关坐标变换,参数设置和PI调节,整流完成后进行逆变,将电压电流信号输入电机进行交流调速,最后将关键输出波形:电机转速、转矩波形和磁链轨迹波形通过示波器显示出来。仿真结果如图6所示。

图6 转子转速及电磁转矩波形图

图7 定子磁链轨迹
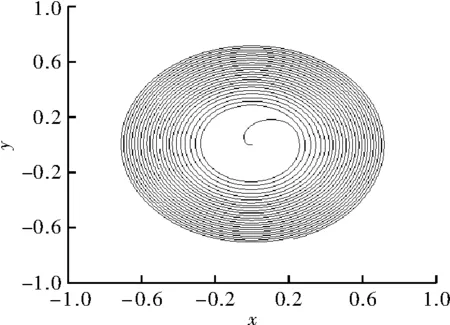
图8 转子磁链轨迹
分析可得采用电压型变流器,双闭环控制与矢量控制使得交流侧功率因数可调,网侧电压电流波形输出谐波少,网侧功率因数>0.95,相电流不超过额定值的20%,波形稳定。电机转速与电磁转矩成函数关系,转速为正电机正向运行,为负反向运行。转速相应过调量<0.015,系统启动到稳定转速时间<0.4 s,且相比较而言,转子磁链圆外轨迹较为密集,而定子磁链轨迹则圆中心更为密集,符合系统技术指标。
5结束语
本文建立了双PWM四象限交流调速系统的各个模块的数学模型,并利用Matlab/Simulink搭建出仿真模型,并根据PWM变流器在各个不同时间段的不同功能,分别设计控制器采用双闭环和矢量控制,最终达到了让电机四象限运行的目的。同时改善了网侧功率因数低,谐波含量高等缺点。仿真结果显示,系统的动态特性和静态特性较好,验证了控制策略的正确性和控制器的可用性。
参考文献
[1]Li s,Li y.a novel fast current-control method for the back-back converters[c].Hammamet,Tunisia:IEEE International Conference on Industrial Technology(ICIT),2004.
[2]Chen Yiqiang,Ooi Boon-Teek.Multimodularmultilevel rectifier/inverter link withindepend relative power control[j].IEEE Transactions on Power Delive,1998,13(3):902-908.
[3]张兴,张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2012.
[4]丁辉,胡协和.交流异步电动机调速系统控制策略综述[j].浙江大学学报:工学版,2011,45(1):50-58.
[5]Abbondanti a,Brennen M.Variable speed induction motor drive use electronic slip calculator based on motor voltages and currents[j].IEEE Transactions on Industry Application,1975(3):483-488.
[6]王斯然.异步电机高性能变频器若干关键技术的研究[D].杭州:浙江大学,2011.
[7]林渭勋.现代电力电子技术[M].北京:机械工业出版社,2013.
[8]伍小杰,罗悦华,乔树通.三相电压型PWM整流器控制技术综述[j].电工技术学报,2005,20(12):7-12.
[9]陈耀军,钟炎平.基于合成矢量的电压型PWM整流器电流控制研究[j].中国电机工程学报,2006,26(2):143-148.
[10]洪乃刚.电力电子电机控制系统仿真技术[M].北京:机械工业出版社,2013.
Three-Phase Double PWM Four Quadrant AC Power Transmission System
HUANG Minyao,YANG Wenhuan,HOU Tiantian,LI Dengke
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
AbstractBecause of uncontrolled rectifier link,traditional power converter suffers low network side power factor and high harmonic content,thus its limited application and poor speed stability and accuracy of the motor control system.Besides,it can not operate for four quadrants.This paper,a dual PWM converter system model is built by using Matlab and simulated.Then the simulation model runs while the asynchronous motor running in four quadrants based on the method of vector control.The results show that the system overcomes the disadvantages of low power and high harmonic content and that the motor had good speed stability and accuracy,indicating that the control strategy is correct and effective.
KeywordsPWM converter;Matlab;AC speed regulation;vector control
doi:10.16180/j.cnki.issn1007-7820.2016.05.049
收稿日期:2015-09-29
作者简介:黄敏瑶(1991—),男,硕士研究生。研究方向:电力电子与电力传动。杨文焕(1954—),男,教授,硕士生导师。研究方向:电力电子与电力传动。
中图分类号TM461
文献标识码A
文章编号1007-7820(2016)05-183-04