基于STC89C51单片机的避障移动机器人的设计与实现
2016-06-12喻伟闯周彬彬袁海林廖红华
喻伟闯,王 铭,付 豪,周彬彬,袁海林,廖红华*
(1.湖北民族学院 科技学院,湖北 恩施 445000;2.湖北民族学院 信息工程学院,湖北 恩施 445000;3.怀化学院 电气与信息工程学院,湖南 怀化 418000)
基于STC89C51单片机的避障移动机器人的设计与实现
喻伟闯1,王铭3,付豪2,周彬彬2,袁海林2,廖红华2*
(1.湖北民族学院 科技学院,湖北 恩施 445000;2.湖北民族学院 信息工程学院,湖北 恩施 445000;3.怀化学院 电气与信息工程学院,湖南 怀化 418000)
摘要:设计一种避障移动机器人,该机器人以STC89C51单片机作为控制核心,通过两个四相六线步进电机控制转动,并由L293D专用电机驱动芯片驱动.避障模块采用四对反射式红外传感器检测障碍物位置,单片机控制系统通过PID控制算法对采集的信号进行处理,语音模块选用ISD1420语音芯片进行报警.实验结果表明,该系统性能稳定,机器人能智能避障和自动语音报警.
关键词:移动机器人;避障;单片机;步进电机;红外传感器
移动机器人是智能机器人研究领域的一个重要分支,被广泛地应用于侦查、探测、军事、搜救等特殊场合[1].随着传感器技术的快速发展,自主避障移动机器人成为当前智能机器人研究的热点[2-3].以往对机器人的研究大多是在已知、结构化环境中进行的,难以适应复杂、多变的实际环境要求.本文设计的避障移动机器人采用STC89C51单片机作为控制核心,机器人能够根据红外传感器检测到的信号判断出障碍物的位置,通过智能算法控制步进电机前进、后退、左右转弯,自动避开障碍物,同时发出语音报警提示.该系统结构简单、性能稳定性,同时具有功耗小、响应快、成本低等优点,能满足不同障碍物环境下机器人智能避障的需求.
1硬件电路设计
1.1系统总体设计
设计采用STC89C51单片机来完成各项控制功能,其外围电路主要包括:电机驱动模块、红外避障模块和语音报警模块.红外避障模块将检测信号反馈给单片机,单片机判断障碍物的具体位置,控制步进电机向前、向后、向左或向右转动,同时控制语音芯片进行报警提示.系统总体结构如图1所示.
1.2电机驱动模块
步进电机具有启停快,转换精度高,正转反转控制灵活等特点.本设计选用四相六线步进电机,其半步工作方式和整步工作方式的控制时序如表1、2所示.与整步方式相比,半步方式具有精度高、低速运行时振动小的优点,所以设计中选用半步工作模式.
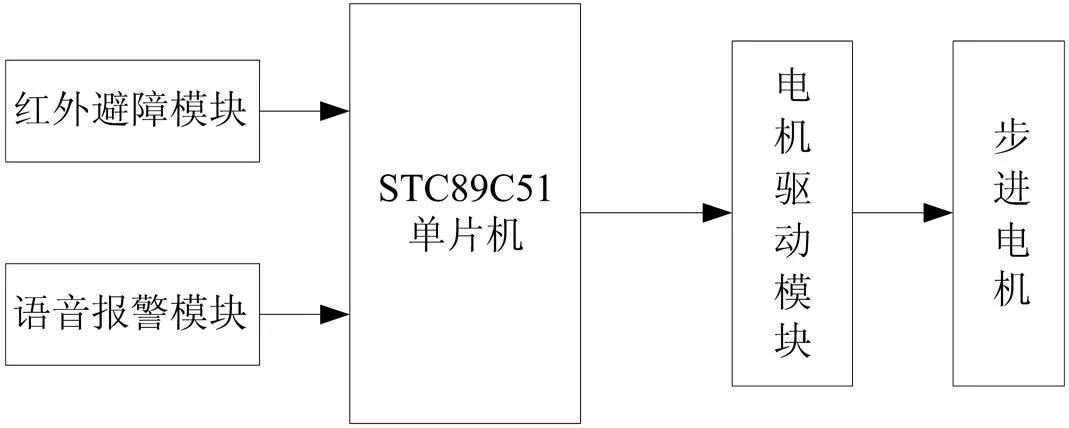
图1 系统总体结构框图Fig.1 Overall block diagram of the system
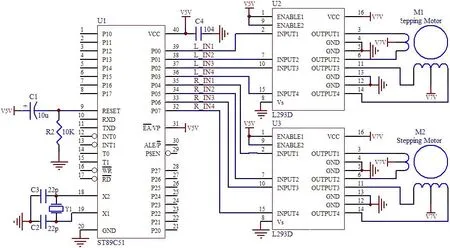
图2 步进电机驱动模块Fig.2 The stepping motor driving module
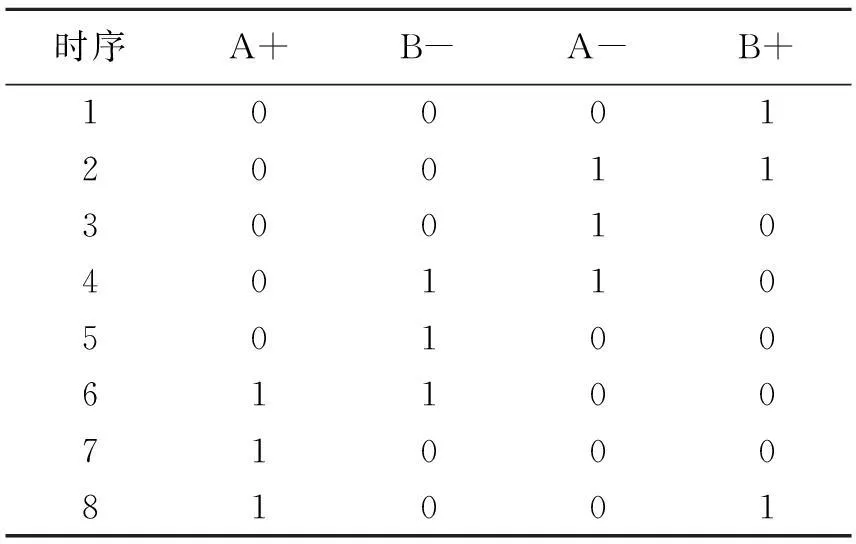
时序A+B-A-B+1000120011300104011050100611007100081001
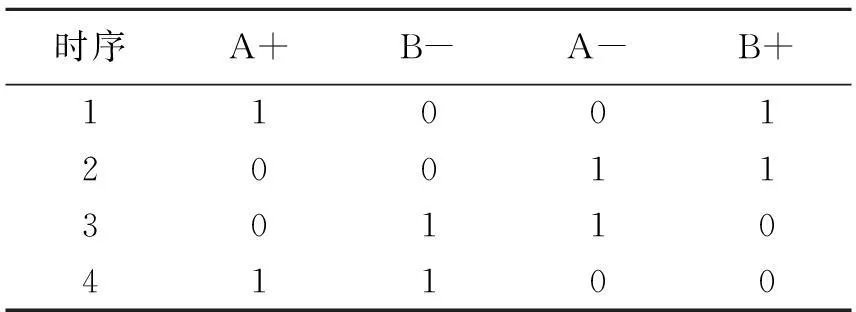
表2 整步工作方式时序表
步进电机在使用过程中加入驱动器的话,会使电路变得简单,只需要控制脉冲(频率、数目)和方向(电平高低)两个信号.本设计选用L293D专用电机驱动芯片,L293D芯片可以直接由单片机的I/O口提供信号,输出电压最高可达32 V,可以直接通过电源来调节输出电压;最高电流可达2A;能稳定地驱动步进电机,电路设起来比较方便.步进电机驱动模块如图2所示.
1.3红外避障模块
机器人安全避障的实现方法主要有超声避障、红外传感器、激光避障、微波雷达等方法.超声避障实现方便,技术成熟,成本低,成为移动机器人常用的避障方法[4],但超声波避障受环境影响较大,电路复杂,易产生三角误差、多次反射[5],地面对超声波的反射,会影响系统对障碍物的判断.本设计中,由于障碍物距离机器人有效距离较近,机器人只需要避开障碍物,不必识别障碍物的精确位置,因此可以采用非调制的红外传感器避障方法.红外避障模块的电路如图3所示.
红外传感器分对射式和反射式两种.设计中选用的是反射式红外传感器,在机器人小车的前端和后端的左右两侧各安装一个红外传感器.为了避免传感器之间的相互干扰,将它们的发射、接收管用黑纸筒进行了隔离.由于经电压比较器LM324输出的高电平为3.26 V,低电平是1.0 V,单片机不能很好的识别,所以在比较器的输出端接一个六反向器CD4069,将低电平转换成5 V,高电平转换成0 V.图3中P2.1~P2.4分别对应左前端、右前端、左后端和右后端红外传感器的反馈信号.
1.4语音报警模块
本设计中的语音报警模块选用具有分段录放功能的语音芯片ISD1420,其电路如图4所示.ISD1420是美国ISD公司开发的优质单片语音录放芯片,该芯片采用了先进的模拟语音存储技术(DAST TM),具有音质好、无须A/D转换、断电语音保护等特点,最大可录20秒的语音信息[6].ISD1420语音芯片片内包含振荡器、语音存储单元、前置放大器、自动增益控制电路、抗干扰滤波器、输出放大器等单元电路.一个最小的录放系统仅需一个驻极体话筒、一个喇叭、两个按钮、一个电源和少量的电阻、电容,所需的外围元件少,使用起来非常方便.

图3 红外避障模块Fig.3 The infrared obstacle avoidance module

(a)主流程图 (b)红外避障子程序流程图图5 系统工作流程图Fig.5 The flowchart for the system
2系统软件设计
本设计整个系统是以移动机器人为控制对象,以有限区域为工作背景,完成对未知有障碍物分布平面的智能避障,并将检测到的情况发送到单片机控制中心进行相关操作.因此,在软件设计中,要求机器人具有独立决策的能力,并能够在单片机控制下协调工作[7].如:绕开障碍、选择下一步的有效路径、语音报警等.
机器人路径规划是机器人在已知的环境中,自主寻找一条优化路径[8].本设计改变机器人的传统的设计方法,更加注重机器人的适应性,为了保证对系统的精确控制,软件上采用PID控制算法.通过机器人自身对未知环境的探测,来建立环境的模型,并且具有自恢复能力,能在进入循环推测中退出.系统的主流程图如图5(a)所示,红外避障子程序流程图如图5(b)所示.
步进电机在空载情况下能够正常启动的脉冲频率称为空载启动频率,如果脉冲频率高于该值,步进电机不能正常启动,可能会导致丢步或堵转现象.在有负载的情况下,启动频率更低.如果要使电机达到高速转动,脉冲频率应该有加速过程[9],以一个较低频率启动,然后按一定加速度升到所希望的高频,电机转速从较低速度逐步上升到较高速度.程序中设置了正转起步和反转起步子程序,其目的是使小车在运动中先有一个加速起步过程,然后才开始匀速前进或后退.
3系统测试与分析
根据实验环境要求,我们在不同方位放置障碍物,使机器人在环境中进行实验,并修正了程序算法,机器人的运动方式如图6所示.经过反复实验,实现了机器人小车的智能移动避障功能.该系统在以下两个方面具有较为突出的优点:一是实现了多路传感器的数据融合处理;二是利用了单片机的集成性,极大的简化了外围电路.

图6 机器人运动方式图Fig.6 The pictures of the robot moving modes
4结语
本设计中的避障移动机器人以STC89C51单片机为控制核心,采用步进电机控制其转动,并通过电机驱动模块进行驱动,同时选用反射式红外传感器检测障碍物位置,所编的程序算法较好地实现的了机器人的避障移动功能,当红外避障模块没有感应到障碍物时,机器人小车向前行驶,一旦遇到障碍物,红外传感器迅速作出反应,反馈信号给单片机,单片机通过控制步进电机的转向使机器人小车避开障碍物,同时给语言报警模块一信号,使其发出告警提示.整个系统硬件电路简单,性能稳定,便于扩展,具有广阔的市场应用前景.
参考文献:
[1]苏红飞.野外机器人导航避障系统设计[D].南京:南京理工大学,2008.
[2]刘颜.基于DSP的移动机器人控制系统设计与避障算法的实现[D].北京:北京交通大学,2007.
[3]于竹林.嵌入式移动机器人避障研究与系统设计实现[D].青岛:青岛科技大学,2009.
[4]叶涛,李磊,谭民.移动机器人技术研究现状与未来[J].机器人,2002,24(5):107-109.
[5]周兴超,段智敏.移动机器人的避障模糊算法[J].沈阳理工大学学报,2008,27(4):23-25.
[6]徐朝农,韩江洪.基于紧揍存储模式的ISD1420语音系统的开发[J].微计算机信息,2000,16(5):67-68.
[7]郑忠楷.智能避障机器人设计初探[J].福州师专学报,2002,22(2):15-18.
[8]梁玉清,李妍,何静涛.一种改进栅格蚁群算法的机器人路径规划[J].湖北民族学院学报(自然科学版),2014,32(2):196-199.
[9]李磊.基于单片机的步进电机升降速控制研究[J].微机电,2011,44(11):84-86.
责任编辑:时凌
Design and Implemention of Obstacle Avoidance Mobile Robot Based on STC89C51 MCU
YU Weichuang1,WANG Ming3,FU Hao2,ZHOU Binbin2,YUAN Hailing2,LIAO Honghua2*
(1.Science and Technology College of Hubei University for Nationalities,Enshi 445000,China;2.School of Information and Engineering,Hubei University for Nationalities,Enshi 445000,China;3.College of Electrical and Information and Engineering,Huaihua University,Huaihua 418000,China)
Abstract:In this paper,a kind of obstacle avoidance mobile robot was designed.It adopted the STC89C51 MCU as the control core,the rotation of the robot was controlled by two four-phase six-line stepping motors,which were driven by the special driving chip L293D.Four pairs of reflective infrared sensor were used in the obstacle avoidance module to detect obstacle position.The collected signals were processed by PID control algorithm,and the robot alarmed by the voice chip ISD1420.The experimental results show that the system is stable,the robot is able to avoid obstacles intelligently and give voice alarm automatically.
Key words:Mobile robot;obstacle avoidance;MCU;stepping motor;infrared sensor
收稿日期:2015-12-04.
基金项目:国家自然科学基金项目(61463014/61263030).
作者简介:喻伟闯(1982- ),男,硕士,主要从事智能控制、嵌入式系统研究;*通信作者:廖红华(1972- ),男,博士,教授,主要从事智能化仪器、嵌入式系统等研究.
文章编号:1008-8423(2016)01-0060-04
DOI:10.13501/j.cnki.42-1569/n.2016.03.016
中图分类号:TP311
文献标志码:A