基于稳定性的四轮独立驱动电动汽车转矩分配策略研究
2016-06-12张缓缓向绪爱叶克宝
张缓缓,向绪爱,叶克宝
(1.上海工程技术大学 汽车工程学院,上海 201620;2.吉林大学 汽车仿真与控制国家重点实验室,吉林 长春 130025)
基于稳定性的四轮独立驱动电动汽车转矩分配策略研究
张缓缓1,2,向绪爱1,叶克宝1
(1.上海工程技术大学汽车工程学院,上海201620;2.吉林大学汽车仿真与控制国家重点实验室,吉林长春130025)
摘要:为了研究四轮独立驱动电动汽车在极限工况下的稳定性,采用了基于BP神经网络的PID控制方法联合控制横摆角速度与质心侧偏角进行转矩分配。首先分析了稳定性的主要特征参数,并确定了控制变量,对独立驱动电动汽车的转矩分配控制策略进行了设计,控制器包括上层控制器与下层控制器。在上层控制器中,根据纵向力的需求,设计了PID控制方法进行速度控制;制定了基于BP算法的PID控制器控制横摆角速度与质心侧偏角产生横摆力矩。在下层控制器中,采用模糊控制方法控制滑移率。最后对所设计的控制系统进行了仿真研究,仿真结果表明:所设计的转矩分配控制策略能够保证车辆在极限工况下行驶的安全稳定性。
关键词:汽车工程;转矩分配;神经网络PID控制;电动汽车;车辆稳定性
0引言
相对于传统内燃机汽车及中央电机驱动电动汽车,独立驱动电动汽车具有结构简单、响应快速灵敏、转矩独立可控等突出特点和优势,是电动汽车发展的特色方向[1-2]。随着人们对车辆主动安全性要求不断提高,如何提高独立驱动电动汽车行驶稳定性成为研究的主要方向之一[3-6],而基于转矩分配的转矩协调控制对独立驱动电动汽车的稳定性具有重要影响[7]。文献[8]以汽车稳定性为目标函数,提出了一种基于轮胎负荷系数最小的最优化转矩分配方法。文献[9]建立了以车辆稳定性为目标的函数,考虑了车辆的纵向力和侧向力,进行转矩分配。本文将整车转矩分配控制作为切入点,通过转矩协调控制,对行驶在低附着极限工况下车辆稳定性进行研究。
1车辆稳定性特征参数分析
1.1横摆角速度
横摆角速度γ由车辆的横向运动产生,而整车的运动状态受纵向、横向及横摆等运动影响。经横摆角速度积分可得到横摆角,其与质心侧偏角β共同组成航向角ψ。可用式(1)表示:
(1)
式中,质心侧偏角根据纵向速度vx与横向速度vy求得:β=tan-1(vy/vx)。
从式(1)可得,如果质心侧偏角很小,航向角ψ大小就由横摆角决定,这时的横摆角就可以表征车辆转向能力,即横摆角速度越小,转向半径越大,转向不明显,反之则转向半径越小。根据实际情况及驾驶经验,理想横摆角应该满足一定条件,即高速状态其方向盘灵敏度不能太高。随着车速的增大及方向盘转角的增加,横摆角增加的程度应减小。
1.2质心侧偏角
质心侧偏角β同样可表征汽车运动状态,它表示车头偏离汽车前进方向的程度。图1与图2分别是汽车质心侧偏角与车辆横摆力矩及侧向力的关系[10]。在图1中,随着质心侧偏角的增大,车辆横摆力矩逐渐减小,当增大到0.15 rad以后,车辆横摆力矩变得接近于0,此时侧向力会增大到一个常数,将失去进一步的侧向力储能。这说明当车辆的质心侧偏角数值变得很大之后,车辆可操控性下降,驾驶者打方向盘对车辆的横摆力矩与侧向力大小几乎没有影响,这是极其危险的。
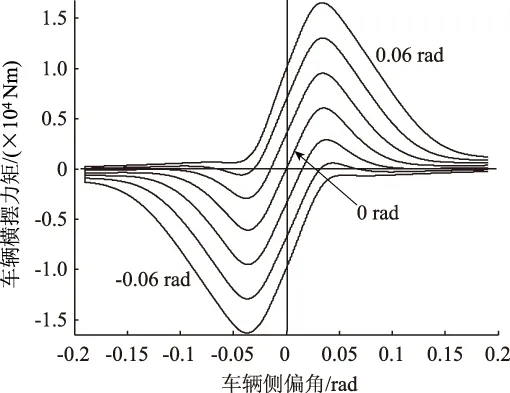
图1 车辆横摆力矩与质心侧偏角的关系Fig.1 Relation between yaw moment and sideslip angle
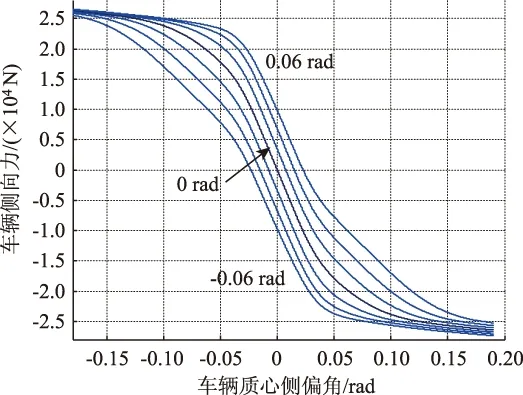
图2 侧向力与质心侧偏角的关系Fig.2 Relation between lateral force and sideslip angle
1.3滑移率
车轮的滑移对车辆的行驶稳定性影响很大,其中路面附着系数是影响车轮滑移率的主要因素,滑移率S与路面附着系数μ的关系如图3所示。
图3 路面附着系数与轮胎滑移率之间的关系Fig.3 Relation between road adhesion coefficient and slip rate of tire
从图中看出,横向附着曲线随着滑移率增大而急剧下降。当滑移率增大到80%以后,侧向附着系数接近0,如此小的侧向附着系数,使得汽车的侧向附着力很小,很容易导致车辆发生侧滑,难以保证车辆稳定行驶。但是如果车辆的滑移率太小,纵向附着系数不够大时,虽然保证了侧向附着系数,但无法保证整车的动力性。因此选择合适的滑移率,既能保证纵向附着力,又能保证侧向附着力足够大,才能确保汽车稳定行驶。
2转矩分配控制策略
2.1转矩分配的控制逻辑
根据驱动力利用效率可以对每个车轮进行有目的独立控制。所以转矩分配的一般控制逻辑为:按照驾驶员的需求或汽车的运动状态,通过增加或减小各轮的驱动力来达到改变汽车横摆力矩的目的,同时也会相应地改变侧向力。
2.2转矩分配的控制算法
所设计的驱动控制算法流程,大致可用图4表示。
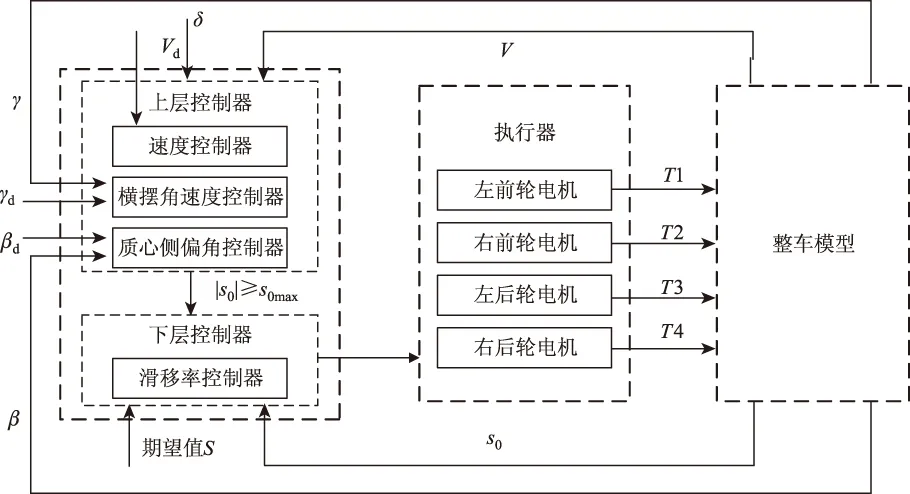
图4 驱动控制算法示意图Fig.4 Schematic diagram of drive control algorithm

3控制器的设计
3.1速度控制器
速度控制器包含3个输入量:给定车辆转向输入角δ,给定的车辆初速度(即驾驶员期望速度)Vd及车速V。速度控制器的目的是通过两个速度的差值经过速度转换器计算出车辆所需要的牵引力T总。图5所示为速度控制器流程。
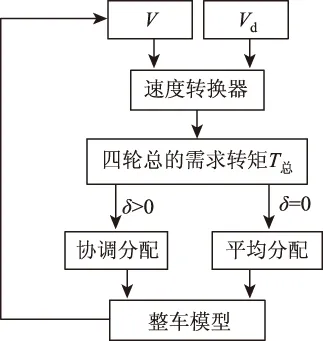
图5 速度控制器流程Fig.5 Flowchart of speed controller
在速度转换器中,由式(2)求得所需转矩[11]:
(2)
式中Kv是比例控制系数。
3.2理想横摆力矩控制器
其中参考模型选择线性二自由度模型[12]。在参考模型中,其理想横摆角速度可用式(3)表示:
(3)
然而在地面附着极限下,车辆侧向加速度ay的约束为:
(4)
当侧偏角极小时,忽略侧偏角的影响,则可用式(5)表达车辆侧向加速度:
(5)
式中,μ为地面附着系数;g为重力加速度。
综合式(4)与式(5),即可得到理想横摆角速度应满足下面的条件:
(6)
所以将γ*修正为:
(7)
取理想质心侧偏角:βd=0。
图6是BP神经网络理想横摆力矩控制器,它由2个控制回路组成:内环是常规PID控制器,外环是由BP神经网络对PID控制网络参数自整定计算。同时采用了具有阻尼项的权值调整算法,弥补了传统的BP算法由于梯度下降法的不足而导致其收敛速度缓慢的缺陷,从而保证了学习速率不仅足够大而且又不易产生振荡。
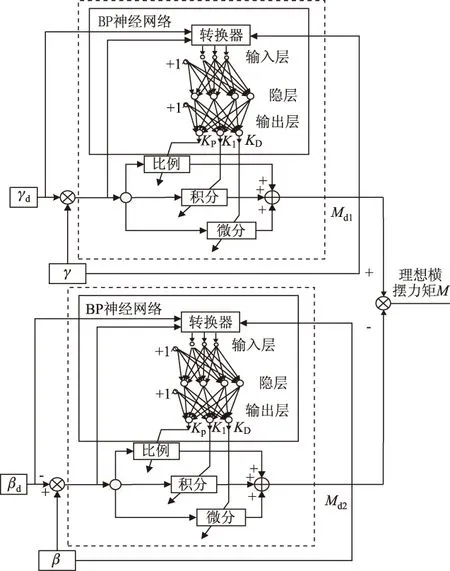
图6 理想横摆力矩控制器Fig.6 Ideal yaw moment controller
由图6可知,横摆角速度控制器对车辆产生附加横摆力矩Md1;质心侧偏角控制器对车辆产生附加横摆力矩Md 2。所以理想横摆力矩M为:
(8)
得到理想横摆力矩后,利用分配控制器,对横摆力矩进行相应的分配。
3.3滑移率控制器
滑移率采用模糊控制方法进行控制,其原理如图7所示。
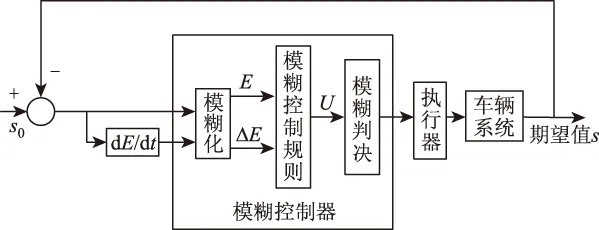
图7 二维模糊控制器工作原理Fig.7 Working principle of 2D fuzzy controller
图中,s0为车轮实际行驶状态的滑移率,期望值s是目标滑移率。系统输入量包括:车轮实际滑移率与目标滑移率之差E,其中E=S-S0;误差变化率ΔE,其中ΔE=dE/dt,系统输出量为调节的驱动转矩U。
4仿真试验
利用MATLAB/SIMULINK平台搭建了整车动力学模型。在对整车、车轮及轮胎作相应合理简化基础上,建立了包括整车纵向、横向、横摆、侧倾、俯仰及4个车轮转动在内的九自由度整车模型。仿真所需车辆几何参数如表1所示。
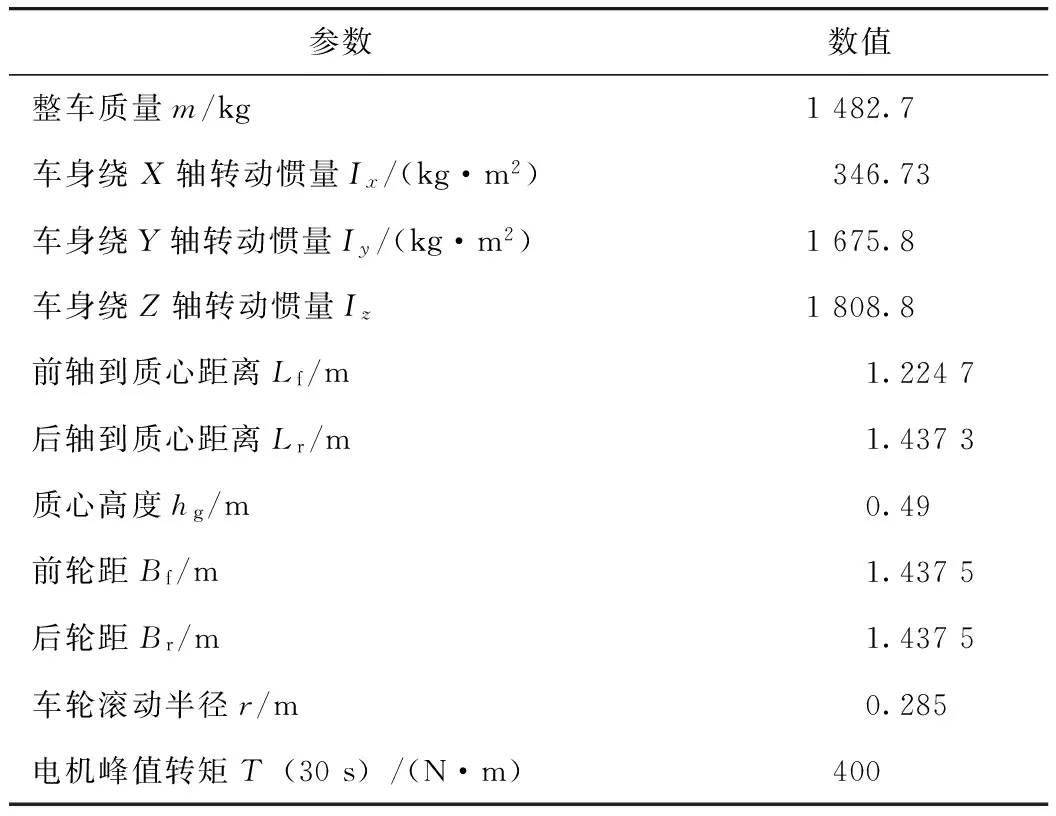
表1 仿真车辆几何参数表
仿真前,给定车辆初速度为40 km/h,方向盘转角阶跃输入0.2 rad。取地面附着系数为0.2,相当于压实的雪路面。在这种低附着路面低速研究更有一定的现实意义。仿真针对单纯PID控制与基于BP算法的PID控制进行对比研究。仿真结果如图8~图10所示。
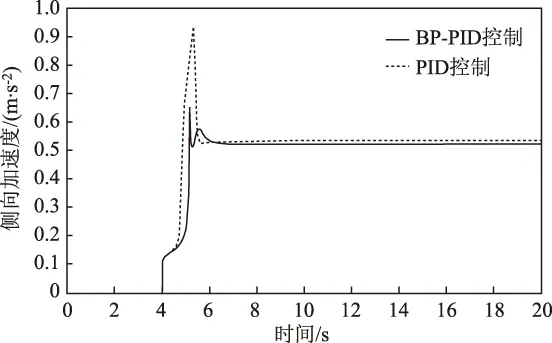
图8 侧向加速度响应曲线Fig.8 Curves of lateral acceleration
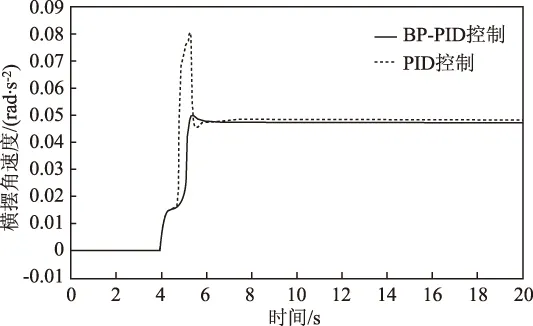
图9 整车的横摆角速度曲线Fig.9 Curves of vehicle’s yaw rate
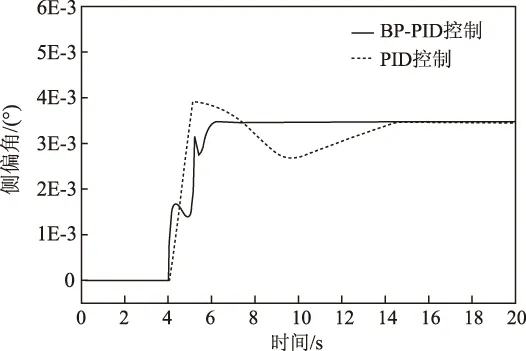
图10 质心侧偏角响应曲线Fig.10 Curves of sideslip angle
从仿真结果可以看出,在单纯的PID控制下,车辆的状态最终趋于稳定,而利用BP神经网络控制后,车辆的稳定性得到了显著增强。由图8侧向加速度曲线可知,随着转向角的输入,车辆的侧向加速度在增大,仅采用PID控制时,曲线激增很大,并存在波动。这是由于转向角输入后,车辆受到了侧向力的作用,导致侧向加速度很大。利用BP神经网络控制后,曲线增长很平稳,而且很快得到了恢复。由图9整车的横摆角速度曲线可以看出,没有BP控制下的曲线的激增值是很大的,在此种低附着极限工况下,激增的横摆力矩会给车辆造成很大的危险,利用BP控制后,有效地控制了车辆的横摆力矩的大小,使车辆不会失稳严重。由图10中质心侧偏角响应曲线可知,利用BP神经网络进行控制,能有效地控制车辆的横摆力矩的大小,保证车辆在此种低附着路面行驶的稳定性。
5结论
四轮独立驱动电动车的转矩控制灵活多样,可根据实际需求进行分配,对这类车进行稳定性研究具有重要价值。在对设计的控制系统进行单纯的PID控制仿真与基于BP神经网络的PID控制仿真对比研究发现,基于BP神经网络的PID控制效果比单纯的PID控制要好得多,所设计的转矩分配控制策略能确保车辆在极限工况下行驶的稳定性。未来研究将对控制策略功能进行完善,并进行软件的相关开发工作及实车验证。
参考文献:
References:
[1]WANG R, WANG J. Stability Control of Electric Vehicles with Four Independently Actuated Wheels[C]// Proceedings of the IEEE Conference on Decision and Control and European Control Conference. Orlando, FL: Institute of Electrical and Electronics Engineers Inc., 2011: 2511-2516.
[2]QIN G, ZOU J, XU H, et al. Torque Allocation Strategy of 4WID In-wheel Motor Electric Vehicle Based on Objective Optimization[C]// Proceedings of the American Control Conference. Portland, OR: Institute of Electrical and Electronics Engineers Inc.,2014:2600-2605.
[3]林程,彭春雷,曹万科.独立驱动电动汽车稳定性的滑模变控制结构[J].汽车工程,2015,37(2):132-138.
LIN Cheng, PENG Chun-lei, CAO Wan-ke. Sliding Mode Variable Structure Control for the Stability of Independent Drive Electric Vehicle[J]. Automotive Engineering, 2015,37(2):132-138.
[4]丁惜瀛,张钦爽,覃艳丽,等.基于转矩分配的电动汽车横摆稳定性控制[J].大功率变流技术,2011(5):41-44,49.
DING Xi-ying, ZHANG Qin-shuang, QIN Yan-li, et al. Yaw Stability Control of EV Based on Torque Distribution [J]. High Power Converter Technology, 2011(5):41-44,49.
[5]熊璐,余卓平,姜炜,等.基于纵向力分配的轮边驱动电动汽车稳定性控制[J].同济大学学报:自然科学版,2010,38(3):417-421,426.
XIONG Lu, YU Zhuo-ping, JIANG Wei,et al. Research on Vehicle Stability Control of 4WD Electric Vehicle Based on Longitudinal Force Control Allocation[J]. Journal of Tongji University:Natural Science Edition, 2010,38 (3): 417-421,426.
[6]杨秀建,王增才,彭伟利,等.极限工况下周期转向汽车侧向动力稳定性及分岔分析[J].公路交通科技,2009,26(11):141-145,152.
YANG Xiu-jian, WANG Zeng-cai, PENG Wei-li ,et al. Analysis on Lateral Dynamic Stability and Bifurcation of Vehicle Periodic Steering under Critical Condition[J]. Journal of Highway and Transportation Research and Development, 2009,26(11):141-145,152.
[7]王庆年,张缓缓,靳立强.四轮独立驱动电动车转向驱动的转矩协调控制[J].吉林大学学报:工学版, 2007,37(5):985-989.
WANG Qing-nian, ZHANG Huan-huan, JIN Li-qiang. Torque Co-ordinated Control of Four-wheel Independent Drive Electric Vehicles in Cornering[J]. Journal of Jilin University:Engineering Science Edition, 2007, 37(5):985-989.
[8]MURATA S. Vehicle Dynamics Innovation with In-wheel Motor[EB/OL].[2015-03-03]. http://papers.sae. org/2011-39-7204/
[9]MOKHIAMAR O, ABE M. How the Four Wheels Should Share Forces in an Optimum Cooperative Chassis Control[J]. Control Engineering Practice, 2006,14 (3):295-304.
[10]张缓缓.电动轮驱动电动车转矩协调控制研究[D].长春:吉林大学,2009.
ZHANG Huan-huan.Research on Torque Coordinating Control of In-wheel Motor Driving Electric Vehicle[D].Changchun:Jilin University, 2009.
[11]KANG J, YI K., HEO H. Control Allocation Based Optimal Torque Vectoring for 4WD Electric Vehicle[EB/OL].[2015-03-03]. http://papers.sae.org/2012-01-0246/
[12]杨万福.汽车理论[M].广州:华南理工大学出版社,2010.
YANG Wan-fu. Automobile Theory[M]. Guangzhou: South China University of Technology Press, 2010.
Research of Torque Allocation Strategy of Four-wheel Independent Driving Electric Vehicle Based on Stability
ZHANG Huan-huan1,2, XIANG Xu-ai1, YE Ke-bao1
(1. School of Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620,China;2. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun Jilin 130025, China)
Abstract:In order to research the stability of four-wheel independent driving electric vehicle under extreme driving condition, a torque allocation method of PID control based on BP neural network is adopted to control both yaw rate and sideslip angle. The main characteristic parameters of the stability are analyzed at first, the control variables are determined, and the torque allocation control strategy for independent driving electric vehicle is designed. There are two layers in the controller, which includes the upper layer and the lower layer. In the upper layer, according to the demand of the longitudinal force, the PID control method is designed for speed control, and the PID controller based on BP algorithm is set up to control the yaw moment created by yaw rate and side-slip angle. In the lower layer, a fuzzy control method is adopted to control slip rate. Finally, the designed control system is simulated. The result shows that the designed torque allocation control strategy can ensure the driving safety and stability of the vehicle under extreme driving conditions.
Key words:automobile engineering; torque allocation; PID control based on neural network; electric vehicle; vehicle stability
收稿日期:2015-05-14
基金项目:汽车仿真与控制国家重点实验室开放基金项目(20121114);上海工程技术大学研究生创新项目(E1-0903-14-01137)
作者简介:张缓缓(1979-),女,湖北随州人,博士,副教授.(zhanghh@sues.edu.cn)
doi:10.3969/j.issn.1002-0268.2016.05.022
中图分类号:TH113.2
文献标识码:A
文章编号:1002-0268(2016)05-0141-06
