基于模型跟踪最优控制的3轴全轮转向车辆操纵稳定性分析
2016-06-12袁磊刘西侠杜峰刘维平装甲兵工程学院北京0007天津职业技术师范大学天津300
袁磊刘西侠 杜峰 刘维平(.装甲兵工程学院,北京0007;.天津职业技术师范大学,天津300)
基于模型跟踪最优控制的3轴全轮转向车辆操纵稳定性分析
袁磊1刘西侠1杜峰2刘维平1
(1.装甲兵工程学院,北京100072;2.天津职业技术师范大学,天津300222)
【摘要】针对3轴车辆操纵稳定性差的问题,在建立车辆理想转向模型的基础上,设计了全轮转向理想模型跟踪最优控制器,基于人-车闭环操纵性综合评价方法分析了全轮转向最优控制、零质心侧偏角控制和原双前桥转向车辆的操纵性,并基于车辆相平面稳定性分析理论分析了全轮转向最优控制和双前桥转向车辆的高速稳定性。结果表明:模型跟踪最优控制车辆具有更好的路径跟踪能力以及更宽的稳定性区域,能够较为有效地改善3轴车辆的操纵稳定性。
主题词:3轴车辆驾驶员模型操纵稳定性理想模型
1 前言
多轴车辆具有车身长、质量大、转动惯量大等显著特点,存在转向避障能力差和中高速行驶稳定性差的问题[1]。研究表明,全轮转向(All Wheel Steering,AWS)系统在改善车辆操纵稳定性方面效果较好。
2轴车辆AWS系统只能对后轴轮胎转角进行控制,而1个控制变量难以实现多个变量的最优,因此,大多数2轴车辆的AWS系统都选择了2个变量的折衷。而多轴车辆AWS系统由于增加了控制变量的数量,能够同时实现对多个状态变量的有效跟踪,其控制方法与2轴车辆有差异[2],因此有必要对多轴车辆AWS控制系统进行深入研究。多轴AWS车辆控制系统仿真研究主要包含3个问题:多轴车辆建模、AWS控制系统设计和车辆操纵稳定性的评价。多轴车辆建模方面,需考虑车辆转向过程中轮胎载荷的转移以及轮胎的非线性问题;AWS控制系统设计方面,研究较多的控制方法是零质心侧偏角控制,这种控制方法增加了车辆的横摆角速度相位滞后,且高速时有较严重的不足转向特性,增加了驾驶员的转向负荷,而理想模型跟踪控制能够较好地解决以上问题;车辆操纵稳定性评价方面,多是基于开环系统简单分析,难以全面表征AWS系统的有效性,可进一步研究闭环系统操纵性评价方法以及表征不同初始条件下车辆稳定性的相平面法[3~6]。
本文以某3轴全轮转向车辆为研究对象,在建立整车模型、轮胎模型和驾驶员模型的基础上,通过设计车辆转向理想模型和AWS最优控制器,对车辆理想模型跟踪最优控制器进行操纵稳定性评价。基于车辆操纵性综合评价方法,对AWS车辆闭环系统的操纵性能进行对比分析;基于相平面理论,对AWS车辆的高速稳定性进行对比分析。结果表明,最优控制AWS系统能够较好地改善3轴车辆的操纵稳定性。
2 系统动力学模型
系统动力学模型包含车辆模型、车辆控制模型和驾驶员模型。车辆建模过程中,对轮胎载荷转移和轮胎非线性特性进行单独建模。
2.1整车模型
车辆动力学建模过程中,模型自由度过多会导致针对性不强,而模型自由度过少会影响仿真精度,因此模型自由度的合理选取是转向性能仿真分析的关键。在对3轴AWS车辆转向性能分析时,由于车辆簧载质量较大,车身的侧倾应该加以考虑。因此,在通常的单轨模型基础上,建立包含侧向、横摆、侧倾3个自由度的整车模型。
各悬架作用力和车辆横摆力矩可表示为:


式中,m为车辆总质量;ms为车辆簧载质量;Ix为车身绕x轴的转动惯量;Iz为车辆绕z轴的转动惯量;vx为车辆纵向速度;vy为车辆侧向速度;wx为车辆绕x轴的转动角速度;wz为车辆绕z轴的转动角速度;δj() j=f,m,r为第j个轮胎的转角;ϕ为车身侧倾角;h0为车辆簧上质量质心到侧倾轴距离;b为车轮轮距;lj为车辆质心到第j轴的距离;Fsi()
i=1f,1m,1r,rf,rm,rr为第i个轮胎的悬架垂向力;Fxi、Fyi为第i个轮胎沿x、y轴受力;Mz为车辆横向摆力矩;Kf为独立悬架阻尼;Cf为独立悬架阻尼。
2.2载荷转移模型
轮胎载荷包含静态载荷和动态载荷2部分,该车为等轴距的3轴车,取轴距为L,由参考文献[7]可得各轴车轮静态载荷为Fszj。

因此,可计算出轮胎载荷为

2.3轮胎模型
车辆仿真过程中,轮胎模型采用Dugoff轮胎模型,该模型能够较好地反映轮胎垂直载荷、地面附着系数与轮胎所受横向力的关系。

式中,Cxi、Cyi分别为轮胎纵向刚度和侧向刚度;Si为轮胎滑移率;λi为轮胎动态参数;μ为路面附着系数;Fzi为车轮垂直载荷。
取地面附着系数μ=0.9,绘制不同垂直载荷下轮胎侧向力随侧偏角的变化曲线,如图1a;取轮胎垂直载荷Fz=25.8 kN,绘制不同地面附着系数下轮胎侧向力随侧偏角的变化曲线,如图1b。由图1可知,当轮胎侧偏角在5°以内时,轮胎侧向力呈现出较好的线性特性。
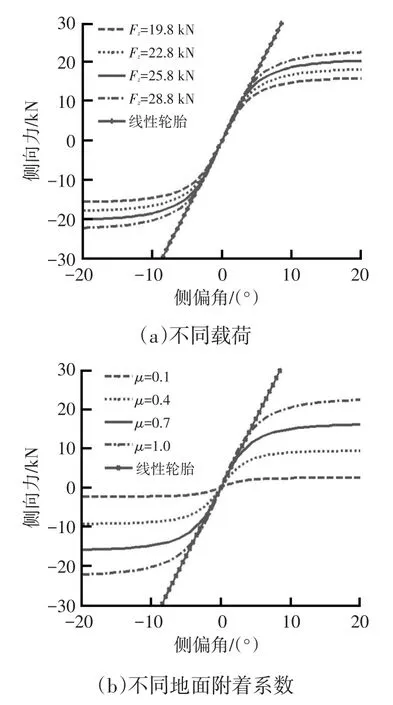
图1 轮胎侧向力学特性曲线
2.4AWS系统控制模型
实践表明,在车辆质心侧偏角较小的情况下,由线性2自由度模型决定的车辆横摆角速度是最稳定的,驾驶员最易掌握[4]。因此,采用线性2自由度模型作为AWS的控制模型。

式中,δi为各轮胎转角;β为质心侧偏角;wz为横摆角速度;C∂i为车轮侧偏角;li为车辆质心到各轴的距离。
若假设δ2=K2δ1、δ3=K3δ1,则由式(7)可求得车辆横摆角速度wz和侧向加速度ay的传递函数为:
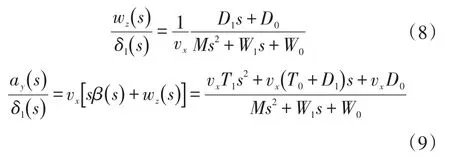
式中:
由传递函数可知,转角比例控制系数K2和K3体现在分子项D1和D0上,代表系统稳定的分母项并未发生改变,即该线性2自由度系统的稳定性并未发生改变。因此,在线性框架内,比例控制AWS并没有改变系统稳定性。因此,寻求能够全面改善车辆操纵稳定性的控制方式对于3轴AWS车辆具有重要意义。
2.5驾驶员模型
郭孔辉教授提出的“单点预瞄最优曲率”驾驶员模型[5]物理概念清晰、跟随性能好,如图2所示。对于3轴AWS车辆,驾驶员模型的建模主要体现在校正时间Tc和校正参数T0的匹配上,并以此来反映驾驶员对AWS车辆的适应性。同时,采用驾驶员预瞄时间T、神经反应滞后Td、操纵滞后Th来反映驾驶员的驾驶能力。
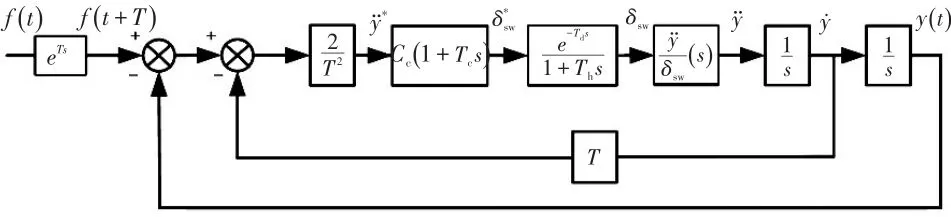
图2 最优曲率驾驶员模型
图2中,驾驶员预瞄时间T取常用值1 s;驾驶员神经反应滞后Td取常用值0.2 s;驾驶员操纵滞后Th取常用值0.1 s。校正时间Tc由驾驶员和车辆结构参数确定,其表达式为:

式中,α为跟随阶数,取常用值0.5;T1、Ty1分别为侧向加速度到转向盘转角传递函数的分子和分母的1阶项,其中传递函数中的K2=0.5,K3=0。
驾驶员校正参数C0可由式(11)计算得到。

3 理想模型跟踪控制
模型跟踪控制器是通过系统传递特性、响应特性、反馈参数的加权处理,获得车辆模型的前馈和反馈控制矩阵,以达到对理想模型跟踪的目的[6]。模型跟踪控制包含理想模型的确定以及模型跟踪控制算法的实现2部分内容。
3.1理想转向模型
AWS的控制目标有2个:一是保持车辆转向时良好的轨迹跟随能力,即可取理想质心侧偏角βd=0;二是保持驾驶员驾驶感受不发生较大的变化,即保证车辆横摆角速度增益尽量与原型车一致[7]。本文原型车为双前桥转向3轴车辆,因此,横摆角速度考虑跟踪双前桥转向车辆的稳态横摆角速度值,即取式(8)中的拉式算子s=0,比例系数K2=0.5,K3=0时的稳态值wzs。另外,考虑车辆侧向加速度大小受到路面附着系数的限制,可进一步获得理想横摆角速度:

因此,AWS车辆理想模型为:

τβ和τw为惯性时间常数,取为0.2,以上理想状态空间方程可变换为:

3.2模型跟踪最优控制
AWS系统控制目标是车辆状态参量与理想转向模型状态参量之间的误差最小,因此可定义状态跟踪误差为:

则误差变化率为:


根据无限时间状态调节器理论,该状态偏差的二次型指标可写为式(18)[8]。根据该指标可计算出反馈控制矩阵U。

其中,Q为状态加权矩阵,R为控制加权矩阵。
系统总控制量U为前馈控制Uq与反馈控制Uf之和。前馈控制用于补偿由前轮转角引起的误差;状态反馈控制的作用是使车辆状态参数跟随理想的状态参数。

对上式进行拉普拉斯变换,可得前馈控制量为:

4 操纵稳定性评价方法
采用时域和频域的开环评价难以准确反映AWS系统的有效性,因此,试图采用人-车闭环系统来评价AWS车辆的操纵性。车辆高速稳定性的分析通常采用相平面法。
4.1操纵性综合评价指标体系
为评价AWS车辆的操纵性优劣,参考文献[9]中提出了评价方法:采用轨道总方差JF表示车辆跟随预期路径的精度;采用转向盘角速度总方差Jδ表示驾驶员的忙碌程度(体力负担);采用综合总方差JT综合评价车辆的闭环操纵性。
式中,Tn为时间长度;f为驾驶员预期轨迹;y为车辆实际运行轨迹;Eˆ为轨道误差的标准门槛值;δ˙sw为转向盘角速度;Eˆ为轨道误差标准门槛值,通常取为0.3 m;δ˙ˆ为转向盘角速度标准门槛值,通常取360°/s;W1、W2为相应指标的加权系数,均取为1。
4.2稳定性相平面分析法
相平面法是一种针对1、2阶线性或非线性系统运动轨迹的图形解法,可通过研究相轨迹来分析系统的稳定性、平衡位置、稳态精度等[10]。车辆相平面通常可以分为2类,即状态参数的相平面和能量相平面,在研究车辆高速稳定性时,通常采用状态参数相平面。状态参数相平面可分为质心侧偏角-质心侧偏角速度相平面和质心侧偏角-横摆角速度相平面。研究表明,质心侧偏角-质心侧偏角速度相平面对车辆的稳定区域和非稳定区域区分较为明显,对车辆系统稳定性的评价效果较好[11,12]。因此,本文采用车辆的质心侧偏角-质心侧偏角速度相平面对AWS车辆的高速稳定性进行评价。
5 仿真分析
操纵性仿真研究中,采用ISO 3888规定的双移线工况作为参考输入[13]。双移线试验表征了车辆超车、紧急避障等工况的安全行驶能力,是典型的车辆测试工况。
5.1操纵性仿真分析
在地面附着系数为0.9、车速分别为30 km/h和80 km/h的2种工况下,对3轴车辆AWS最优控制、AWS零质心侧偏角比例控制、双前桥转向等3种转向方式的相关状态参数和转向轨迹的变化情况进行对比研究。
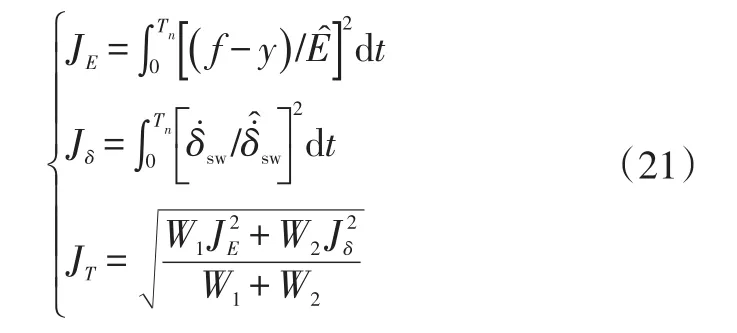
图3为车辆变道行驶时的质心侧偏角变化曲线。由图3可知,模型跟踪最优控制AWS车辆的质心侧偏角几乎始终为0,表现出了良好的轨迹跟踪性能,而原双前桥转向车辆的质心侧偏角波动较大,特别是在车辆高速时。
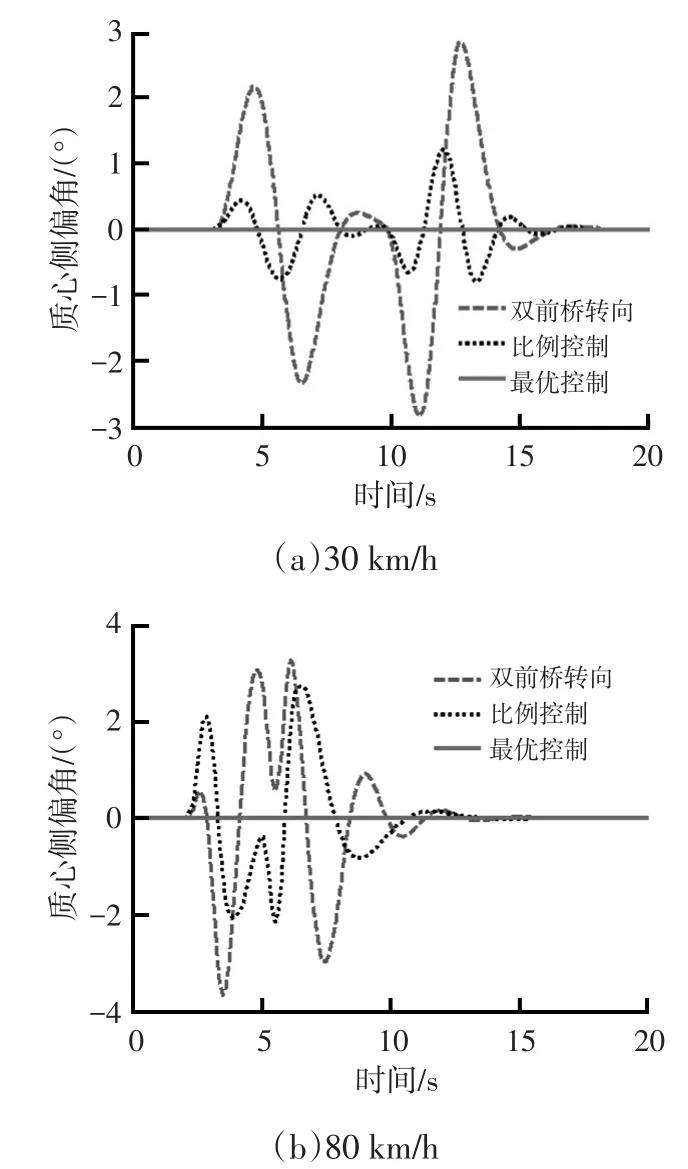
图3 车辆质心侧偏角响应
图4为车辆变道行驶时的横摆角速度变化曲线。由图4可知,模型跟踪最优控制AWS车辆的横摆角速度能够较好地跟踪双前桥转向车辆的横摆角速度,从而使得驾驶员的驾驶感受与原车相比差异不大。
图5为车辆变道行驶时的行驶轨迹变化曲线。由图5可知,模型跟踪最优控制AWS车辆具有较好的路径跟踪性能,能够较好地跟随理想轨迹。
5.2操纵性评价指标计算
3轴车辆在AWS最优控制、AWS零质心侧偏角比例控制和双前桥转向3种转向方式下,双移线仿真的操纵性评价指标计算值见表1。
图4车辆横摆角速度响应
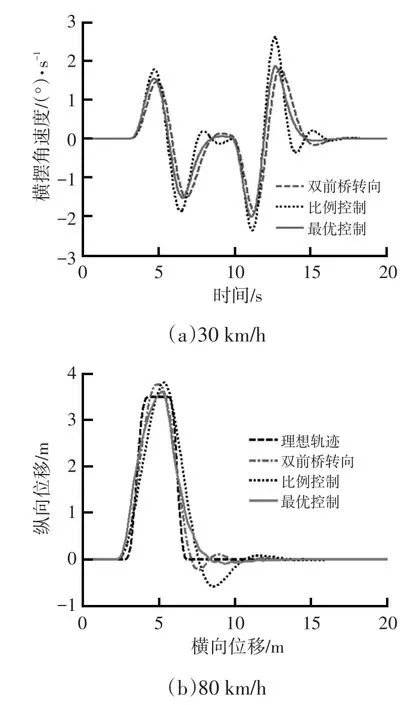
图5车辆行驶轨迹
由表1可以看出:
a.最优控制AWS车辆的行驶轨迹总方差值JE始终小于零侧偏角比例控制AWS车辆和原双前桥转向车辆的总方差值,说明最优控制的AWS车辆能够较好地跟随理想轨迹,降低了车辆紧急避障的危险几率;
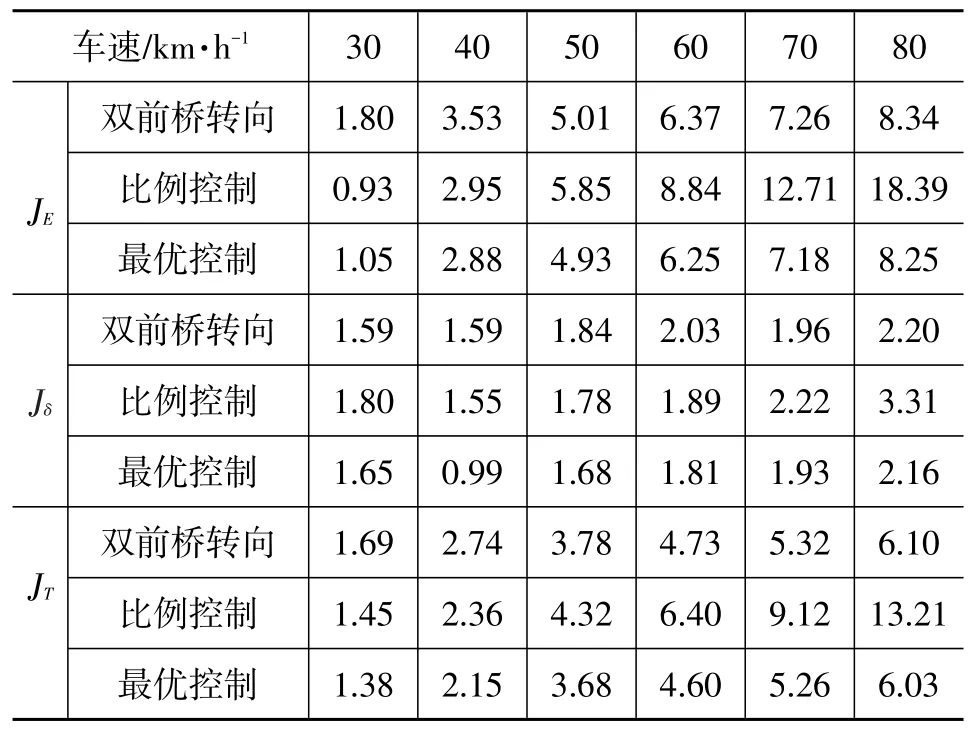
表1闭环操纵系统操纵性评价指标
b.最优控制AWS车辆的转向盘角速度总方差值Jδ始终小于零侧偏角比例控制AWS车辆和原双前桥转向车辆的总方差值,说明驾驶员操纵负荷和忙碌程度相对较低;
c.最优控制AWS车辆的操纵性综合评价总方差值JT始终较小,说明最优控制AWS系统能够较好地改善车辆的操纵性和行驶安全性。
5.3相平面稳定性分析
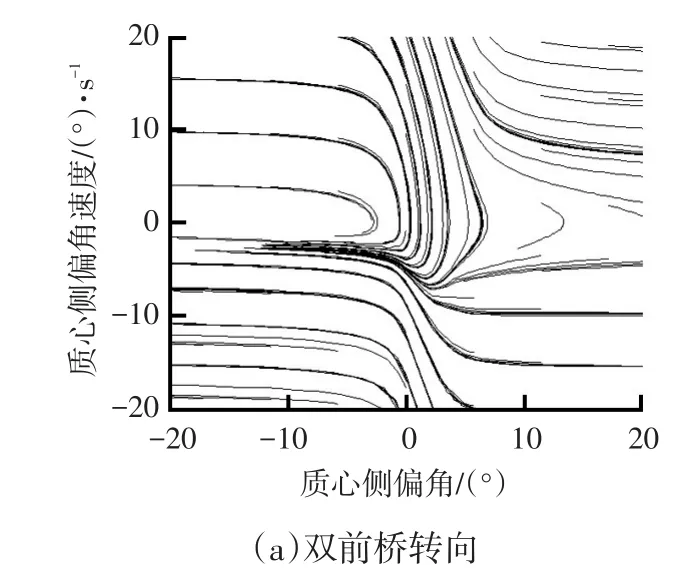
车辆稳定性问题主要出现在低附着系数路面上的高速行驶工况。因此,选取地面附着系数为0.4、车速为80 km/h、前轮转角为3°的高速工况。设车辆质心侧偏角初始值取值范围为-20~20°,质心侧偏角速度初始值取值范围为-20~20(°)/s,可得双前桥转向和最优控制AWS的质心侧偏角-质心侧偏角速度相平面。
图6a为3轴双前桥转向车辆的β-β˙相平面。从图中可知,车辆在该工况下的质心侧偏角和质心侧偏角速度始终未能够收敛。图6b为最优控制AWS车辆的β-β˙相平面。由图可知,车辆在该工况下出现了收敛域,且当初始质心侧偏角速度和质心侧偏角符号相同时,车辆能够在较大范围内收敛。因此,最优控制AWS系统提高了车辆的高速稳定性。
参考文献
1Lee An.Development of steering algorithm for 6WS military vehicle and verification by experiment using a scale-down vehicle.Advanced Vehicle Control,2006:245~250.
2崔胜民.汽车系统动力学仿真.北京:北京大学出版社,2014,138~144.
3Bayar K,Unlusory Y S.Steering strategies for multi-axle ve⁃hicle.International Journal of Heavy Vehicle Systems,2008,15(2):208~236.
4Watanabe K,Yamakawa J,Tanaka M,et al.Turning charac⁃teristic of multi-axle vehicle.Journal of Terramechanic,2007,44(1):81~87.
5郭孔辉.汽车操纵动力学原理.南京:江苏科学技术出版社,2011:297~299.
6Song K.Vehicle modeling with nonlinear tires for vehicle stability analysis.International Journal of Automotive Tech⁃nology,2010,11(3):339~344.
7闫永宝,张豫南,颜南明,等.六轮独立驱动滑动转向车辆运动控制算法仿真研究.兵工学报,2013,34(11):1461~1463.
8袁磊,刘西侠,刘维平.三轴车辆全轮转向系统方案设计性能仿真.郑州大学学报(工学版),2014,35(6):121~124.
9杜峰.基于线控技术的四轮主动转向汽车控制策略仿真研究:[学位论文].西安:长安大学,2008,38~40.
10Willians D E.Generalised Multi-axle Vehicle Handling. Vehicle System Dynamics,2012,50(1):1~18.
11日本汽车技术会编.汽车工程手册1:基础理论篇.北京:北京理工大学出版社,2010:296~298.
12Kim W G,Kang J Y,Yi K.Drive Control System Design for Stability and Maneuverability of a 6WD/6WS Vehicle.In⁃ternational Journal of Automotive Technology,2011,12 (1):67~74.
13李国勇.最优控制理论及参数优化.北京:国防工业出版社,2006:160~185.
(责任编辑斛畔)
修改稿收到日期为2015年12月21日。
The Handling Stability Analysis of Three-axle AWS Vehicle Based on the Optimal Model Tracking Control
Yuan Lei1,Liu Xixia1,Du Feng2,Liu Weiping1
(1.Academy of Armored Force Engineering,Beijing 100072;2.Tianjin University of Technology and Education, Tianjin 300222)
【Abstract】To improve handling stability of three-axle vehicle,an optimal controller for ideal all-wheel steering (AWS)model is designed based on the establishment of ideal vehicle steering model.Handling stability of vehicle with AWS optimal control,zero centroid side-slip angle control and the original double front-axle steering based on the comprehensive evaluation method of human-vehicle closed-loop handling are analyzed,high-speed stability of AWS vehicle optimal control and double front-axle steering based on vehicle phase plane stability analysis theory.The results show that the vehicle with model tracking optimal control has better path tracking ability and wider stability region and it can improve the handling stability of three-axle vehicle effectively.
Key words:Three-axle vehicle,Driver model,Handling stability,Ideal model
中图分类号:U463.4
文献标识码:A
文章编号:1000-3703(2016)03-0030-06
