随钻陀螺测斜系统设计及测试试验*
2016-06-10赵少伟杨保健幸雪松贾立新
谢 涛 赵少伟 杨保健 幸雪松 贾立新
(中海石油(中国)有限公司天津分公司 天津 300452)
随钻陀螺测斜系统设计及测试试验*
谢 涛 赵少伟 杨保健 幸雪松 贾立新
(中海石油(中国)有限公司天津分公司 天津 300452)
通过对光纤陀螺仪、石英挠性加速度计、姿态测量短节、供电短节、泥浆脉冲发生器、地面仪器等关键设备的设计与研制,开发出了一套适合海上作业特点和需求的随钻陀螺测斜系统。室内及现场试验结果表明,自行设计的随钻陀螺测斜系统在大排量钻井环境下能够正常完成井下仪器测斜功能,实时连续提供井筒轨迹数据,测量精度满足异常磁环境下井筒防碰绕障作业要求,地面系统能够完成正常解码,井下仪器结构抗振、耐高温,对钻井环境的适应性强。
随钻陀螺测斜系统;光纤陀螺仪;石英挠性加速度计;姿态测量短节;供电短节;泥浆脉冲发生器;室内测试;现场测试
与MWD等磁测量工具相比,随钻陀螺具有异常磁环境下实现井眼轨迹精确测量的优点。与电缆陀螺工具相比,随钻陀螺在作业过程中的连续随钻测斜功能可使起下钻次数减少,有利于高效实施高密度丛式井防碰绕障。从目前公开资料及报道可知,仅美国科学钻井公司将陀螺姿态测量产品集成到MWD中,所研制的随钻陀螺测斜系统近年来对中国只提供服务,不进行销售。本文通过对光纤陀螺仪、石英挠性加速度计、姿态测量短节、供电短节、泥浆脉冲发生器、地面仪器等关键设备的设计与研制,开发出了一套适合海上作业特点和需求的随钻陀螺测斜系统,并进行了室内及现场测试试验,结果表明该系统能与固井质量测量仪器连接,实现固井质量测量及轨迹复测一次完成,可保障海上油田安全作业与降本增效。对于海上油田丛式井上部井段防碰绕障及提高作业效率有重要意义。
1 随钻陀螺测斜系统设计
新研制的随钻陀螺测斜系统整体结构如图1所示,由井下系统和地面系统2个部分组成。井下系统通过姿态测量短节测量井眼轨迹参数,按照规定的信息传递协议将轨迹参数通过脉冲发生器以泥浆压力脉冲形式传递到地面[1],再由地面系统进行准确解码[2],并将井眼轨迹信息进行处理、显示,为司钻和定向工程师工作提供信息参考。
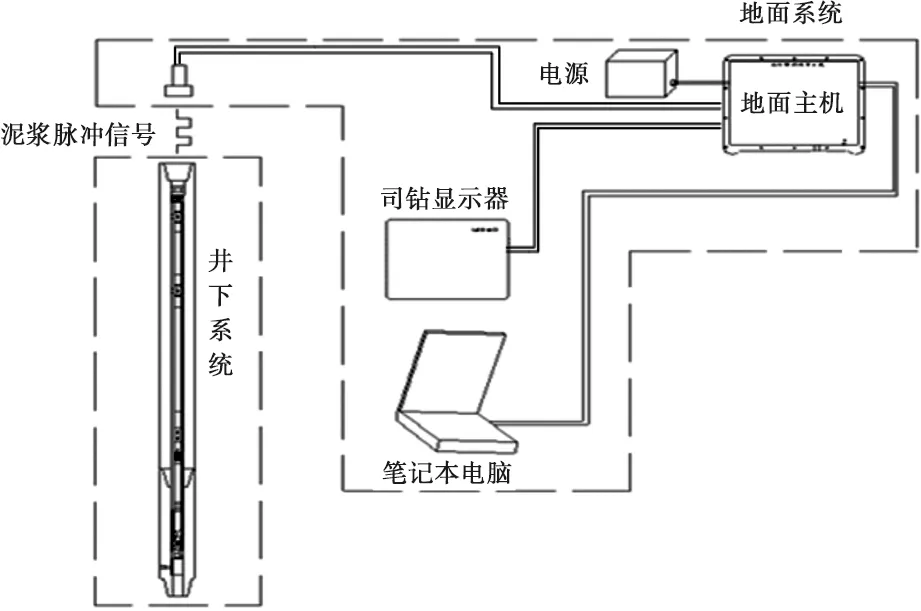
图1 随钻陀螺测斜系统结构示意图
1.1 井下系统设计
井下系统主要由供电短节、泥浆脉冲发生器、姿态测量短节(探管)、扶正器等组成(图2)。供电短节利用3组锂电池(每组8节)组合设计,为井下仪器供电;泥浆脉冲发生器接收探管的指令并按指令实现蘑菇头的动作,改变钻柱内压力,形成压力脉冲;姿态测量短节对工程参数中的井斜、方位、工具面角及温度进行测量。

图2 随钻陀螺测斜系统井下系统示意图
1.1.1 姿态测量短节
姿态测量短节用于在工作过程中对井眼轨迹的数据进行测量,为下一步的井眼轨道控制提供依据[3]。姿态测量短节系统的主要技术指标如下:井斜角精度±0.1°、 测量范围0°~90°;方位角精度±2°(1个标准偏差,3°≤井斜角≤60°),或±3°(1个标准偏差,0.5° ≤井斜角<3°,60°<井斜角≤90°),测量范围0°~360°;工具面角精度±3°(高边工具面和北向工具面输出界线为井斜角在3°~7°之间)。
姿态测量短节采用旋转机构设计(图3),具有2种测量方式,在长测量时进行零速校漂[4-5],提供全部姿态信息,校漂时间大约为5 min;在短测量时仅利用加速度计或Z轴陀螺仪积分提供井斜和工具面,不提供方位信息。姿态测量短节中传感器系统主要由光纤陀螺仪和石英挠性加速度计组成,是随钻陀螺测斜系统中决定随钻陀螺性能的重要部分,是整个系统的核心。

图3 随钻陀螺测斜系统姿态测量短节组成
1) 光纤陀螺仪。
选择光纤陀螺仪的关键是测量精度及仪器寿命,要求零偏稳定性在0.1~1.0°/h(1个标准偏差,10 s计算一次)。陀螺仪的设计选型为双轴光纤陀螺仪,该陀螺仪利用Sagnac效应进行设计,没有旋转和摩擦部件,解决了研制过程中的测量精度及钻井环境适应的问题。光纤陀螺仪技术指标如下:测量范围-500~500°/s;零偏重复性和零偏稳定性(1个标准偏差,10 s平均)≤0.5°/h;标度因数不对称度(3个标准偏差)≤2×10-4;标度因数重复性(3个标准偏差)≤2×10-4;抗振20 g,随机振动。
2) 石英挠性加速度计。
选择石英挠性加速度计同样要考虑测量精度及仪器寿命,零偏稳定性不大于1 mg,标度因数非线性度不大于1×10-4[6-11],石英挠性加速度计技术指标如下:零偏≤5 mg;零偏稳定性≤1 mg;测量范围-3~3 g;测量精度80 μg;刻度系数误差(3个标准偏差)≤1×10-4;标度因数非线性度(3个标准偏差)≤1×10-4;抗振20 g,随机振动。
1.1.2 供电短节
井下系统中姿态测量短节额定功率约为10 W,在使用节电模式下其平均功率可以降到6 W;脉冲发生器的功率在不同状态下相差较大,根据经验,在整个钻井过程中其平均功率应小于3 W。根据上述功率特性及系统工作时间(150 h)要求,电源转换效率按80%计算,供电短节共需24节电池(3.6 V,24 A·h),分为3组(每组8节,并排放置),其中2组电池串联使用给姿态测量短节供电,另一组电池单独给脉冲发生器供电。
1.1.3 泥浆脉冲发生器
井下系统井下信息的传递采用目前比较成熟的泥浆压力脉冲传输方式[3],以钻井液为载体,将井下数据以泥浆压力脉冲的形式传递到地面,地面系统对压力脉冲进行解码,得到井眼轨道数据。泥浆脉冲发生器由主阀芯组件、伺服阀组件及电容节组件等3个部分组成(图4)。

图4 随钻陀螺测斜系统脉冲器主阀芯组件结构示意图
1.2 地面系统设计
地面系统用于接收井下测量信息,经解码后在仪器房内显示及绘图,供定向工程师及时了解井下相关参数,并据此对钻进施工过程进行控制;同时还将工程参数传送至井台显示,供司钻进行操作参考。地面系统由地面主机、司钻显示器、UPS电源、数据处理计算机以及连接电缆等组成(图5)。按照工作环境的不同,地面系统可以分为2个部分,即在井架上使用的仪器和在仪器房内使用的仪器,二者之间通过电缆进行连接。
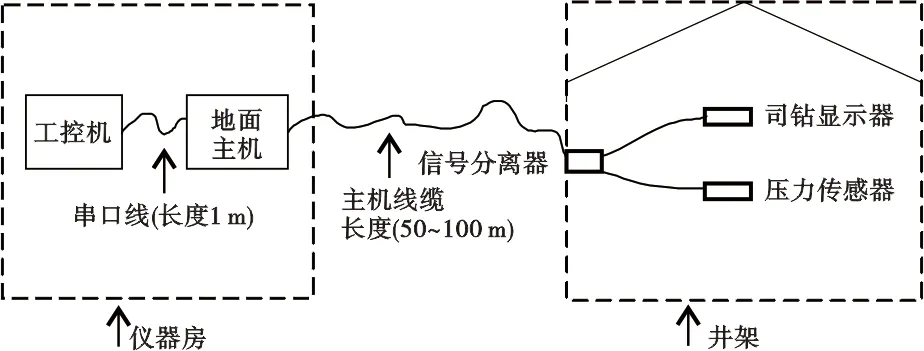
图5 随钻陀螺测斜系统地面系统连接设计图
2 室内测试试验
室内测试包括抗振试验、精度标定试验、高低温试验、地面模拟试验和半实物仿真试验,主要是对随钻陀螺测斜系统和部组件产品的环境适应性及可靠性进行评价,以指导产品的设计、改进。
2.1 抗振试验
对研制的光纤陀螺仪样机进行抗振试验,分为静态测试和振动测试。
2.1.1 静态测试试验
光纤陀螺仪样机静态测试试验结果如图6所示,3次静态测试零偏稳定性数据见表1。从表1可以看出,光纤陀螺仪10 s平均的零偏稳定性优于0.35°/h,30 s平均的零偏稳定性优于0.25°/h,振动前陀螺仪输出满足技术要求。

图6 随钻陀螺测斜系统光纤陀螺仪静态测试结果
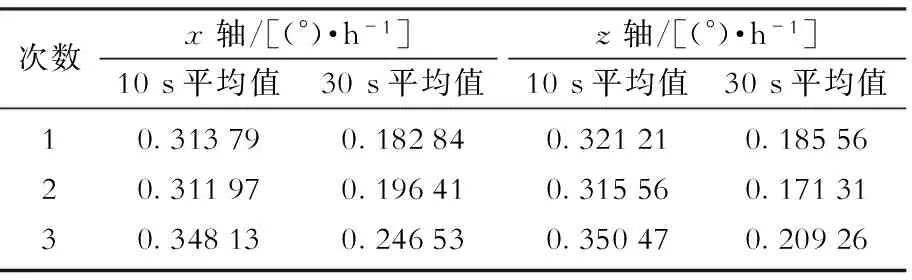
表1 随钻陀螺测斜系统光纤陀螺仪3次静态测试零偏稳定性数据
2.1.2 振动测试试验
将光纤陀螺仪样机固定在振动台上进行抗振动测试,振动测试量级[12]为20 g(随机振动、15 min),测试频率范围20~2 000 Hz。光纤陀螺仪振动测试试验结果如图7所示,光纤陀螺仪10 sx轴和z轴平均的零偏值分别为0.379 58和0.322 12°/h,均优于0.4°/h,30 sx轴和z轴平均的零偏值分别为0.277 04和0.177 04°/h,均优于0.3°/h,振动后陀螺仪输出满足技术要求。

图7 随钻陀螺测斜系统光纤陀螺仪振动测试图
2.2 精度标定试验
将姿态测量短节安装于三自由度位置转台进行精度标定测试,测试数据见表2,从表2可以看出,光纤陀螺仪姿态测量短节井斜最大误差0.07°,方位角最大误差1.44°,工具面角最大误差1.45°,满足试验测量精度要求。

表2 随钻陀螺测斜系统陀螺姿态测量短节精度测试记录表
2.3 高低温试验
根据随钻陀螺测斜系统要求,温度测试的范围为-30~70℃,高低温度点保温时间为2 h,温升变化斜率为3℃/min,温降变化斜率为1℃/min。随钻陀螺测斜系统在升温和保温阶段通电测试,在降温阶段不通电;试验共进行了10个循环工作过程,温度循环曲线如图8所示。试验结果表明,每个部组件产品经过10个循环均能正常工作,无故障。

图8 随钻陀螺测斜系统部组件温度循环曲线
2.4 地面模拟试验
随钻陀螺测斜系统组装完成后进行地面模拟试验(图9),验证测试系统的供电、自寻北、脉冲器发码、地面模拟解码及曲线绘制、长时间工作等功能,达到下井试验前的功能检查和可靠工作时间指标考核的目的,功能测试完成后再进行长时间通电老化试验。试验结果表明,该系统能够在地面模拟测试中150 h内可靠全功能工作,可以满足现场作业需求。
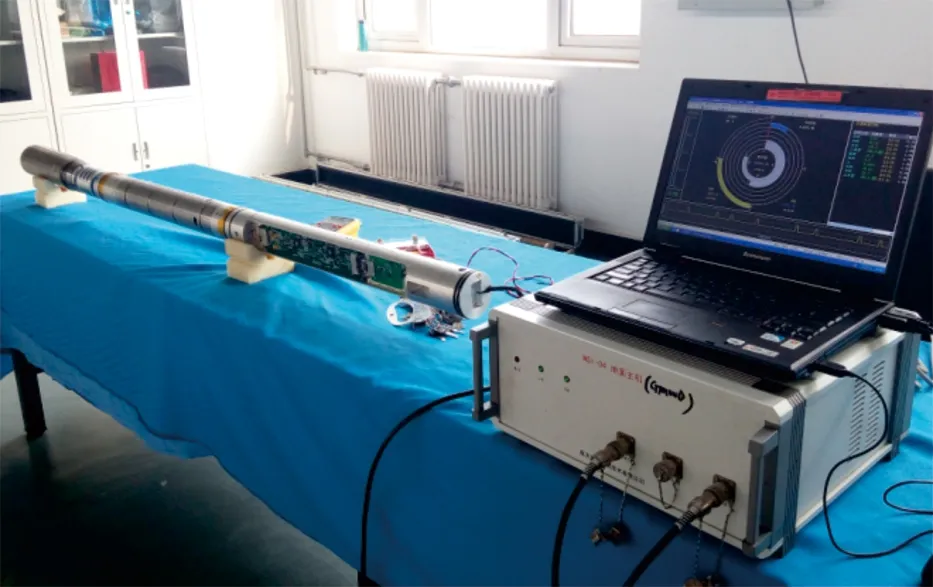
图9 随钻陀螺测斜系统地面模拟试验
2.5 半实物仿真试验
地面模拟验证通过后要对随钻陀螺测斜系统进行半实物仿真试验,主要通过水循环试验考核系统仪器是否具备下井试验的状态,最大限度地仿真模拟井下环境。多次仿真试验结果表明,该系统仪器已达到下井试验状态。
3 现场测试试验
组装完成后的随钻陀螺测斜系统在渤海某油田进行了井下测试试验,井下系统配置为φ311.15 mm钻头+φ244.48 mm马达(0.75°/305 mm)+φ228.20 mm短钻铤+浮阀+φ311.15 mm扶正器+φ203.20 mm悬挂短节(0.88 m)+脉冲器(1.72 m)+扶正器(0.338 m)+电池短节(2.164 m)+扶正器(0.338 m)+探管(2.164 m)+打捞头(0.435 m)。该系统每隔2根钻柱(90 m)进行一次测试,观测到停泵信息后关泵等待5 min,开泵循环钻井液,待地面完整接收停泵信息后结束该测点测试,然后接钻柱并继续下放至下一测点,重复操作。本次井下试验中随钻陀螺测斜系统累计入井时间约为27 h,钻井液排量约为67 L/s,钻进7 h,进尺约100 m,随钻陀螺实钻测量数据见表3。由表3可以看出,在大排量钻井环境下随钻陀螺测斜系统能够正常完成测斜功能,且地面系统能够完成正常解码,仪器功能性验证正常;随钻陀螺测斜系统没有发生断裂、进水,扶正器弹簧无严重冲刷,表明系统结构对钻井环境的适应性强,能够满足使用要求。

表3 随钻陀螺测斜系统实钻测量数据
4 结论
室内及现场测试试验表明,自行设计的随钻陀螺测斜系统适应于海上石油钻井工程领域,陀螺仪综合精度优于0.4°/h,加速度计综合精度优于0.5 mg;实现了陀螺姿态测量短节抗恶劣力学环境设计及随钻化应用,实现精度井斜优于0.1°、方位优于2°;实现了大排量条件下钻井液压力信息的可靠传输及井下数据信息的准确解码,并通过软件设计实现了井下仪器工作模式和参数的灵活设置,更利于工程实践应用。
[1] 吕伟,孙成志,刘宝生,等.光纤随钻陀螺仪在丛式井网防碰中的应用[J].钻采工艺,2014,37(4):23-25.Lv Wei,Sun Chengzhi,Liu Baosheng,et al.Application of fiber optic gyroscope while drilling in multiple wells anti-collision [J].Drilling & Production Technology,2014,37(4):23-25.
[2] 林铁,林恒,高爽,等.光纤陀螺测斜仪数据采集及传输单元设计与实现[J].测井技术,2009,33(4):402-405.Lin Tie,Lin Heng,Gao Shuang,et al.Design and implementation of data acquisition and transmission for fiber optic gyroscopes inclinometer[J].Well Logging Technology,2009,33(4):402-405.
[3] 王励扬,翟昆朋,何文涛,等.四阶龙格库塔算法在捷联惯性导航中的应用[J].计算机仿真,2014,31(11):56-59.
Wang Liyang,Zhai Kunpeng,He Wentao,et al.Application of fourth-order Runge-Kutta algorithm in SINS[J].Computer Simulation,2014,31(11):56-59.
[4] 郝燕玲,张义,孙枫,等.单轴旋转式捷联惯导方位对准研究[J].仪器仪表学报,2011,32(2):309-315.
Hao Yanling,Zhang Yi,Sun Feng,et al.Analysis of single-axial rotation SINS azimuth alignment[J].Chinese Journal of Scientific Instrument,2011,32(2):309-315.
[5] 吴校生,陈文元,崔峰.全固态微陀螺的研究进展[J].电子器件,2008,31(5):1505-1509.
Wu Xiaosheng,Chen Wenyuan,Cui Feng.Researching development of all-solidstate micromachined gyroscope[J].Chinese Journal of Electron Devices,2008,31(5):1505-1509.
[6] 曹丽,刘扬,刘伟.利用加速度计和角速度仪的笔杆运动姿态检测[J].仪器仪表学报,2008,29(4):831-835.
Cao Li,Liu Yang,Liu Wei.Pen motion attitude measurement using accelerometer and gyroscope[J].Chinese Journal of Scientific Instrument,2008,29(4):831-835.
[7] 吕伟,李玮燕,张龙,等.基于光纤陀螺仪的油井测绘系统[J].测井技术,2011,35(6):581-584.
Lv Wei,Li Weiyan,Zhang Long,et al.An oil well trajectory surveying system based on FOG[J].Well Logging Technology,2011,35(6):581-584.
[8] 赵建辉,王鹏鹏,李帆,等.陀螺测斜仪随钻对准中的可观测性研究[J].测井技术,2009,33(3):279-283.
Zhao Jianhui,Wang Pengpeng,Li Fan,et al.On observability analysis for MWD alignment of Gyro inclinometer[J].Well Logging Technology,2009,33(3):279-283.
[9] 杜海龙,张荣辉,刘平,等.捷联惯导系统姿态解算模块的实现[J].光学精密工程,2008,16(10):1956-1962.Du Hailong,Zhang Ronghui,Liu Ping,et al.Realization of attitude algorithm module in strapdown inertial guidance system[J].Optics and Precision Engineering,2008,16(10):1956-1962.
[10] KIM S J,LEE S S,KWON Y S,et al.Dynamic north-finding scheme based on a fiber optic gyroscope[C]∥Proceedings of SPIE.FL,United States,1997:126-136.
[11] 张鹏飞,龙兴武.石英挠性加速度计误差补偿模型的研究[J].传感技术学报,2006,19(4):1100-1102,1170.
Zhang Pengfei,Long Xingwu.Research on compensating error model of quartzose flexible accelerometer[J].Chinese Journal of Sensors and Actuators,2006,19(4):1100-1102,1170.
[12] MANGOLD U.Estimation of useful and disturbing signals in strapdown inertial systems alignment[C]∥Symposium Gyro Technology,2000.
(编辑:叶秋敏)
Design and test of gyroscope inclination survey while drilling system
Xie Tao Zhao Shaowei Yang Baojian Xing Xuesong Jia Lixin
(TianjinBranchofCNOOCLtd.,Tianjin300452,China)
A gyroscopic inclination survey while drilling system suitable for offshore operation characteristics and needs was developed, including fiber gyroscope, quartz flexible accelerometer, attitude measuring crossover, power sub, mud pulse generator, and surface instruments. Lab and field test results show that the home-made inclination survey system can smoothly measure inclination and azimuth under the condition of high mud flow-rate, and provide real-time and continuous hole trajectory data. The data accuracy meets the need of anti-collision and barrier-bypassing in abnormal magnetic environment, and the data can be decoded normally with surface facility. The downhole instrumentation is vibration- and heat-resistant, and is highly adaptable to various drilling environments.
gyroscopic inclination survey while drilling system; fiber optic gyroscope; quartz flexible accelerometer; attitude measuring crossover; power sub; mud pulse generator; lab test; field test
谢涛,男,工程师,2005年毕业于中国石油大学(华东),主要从事海洋石油钻完井技术研究工作。地址:天津市塘沽区闸北路609信箱(邮编:300452)。E-mail:xietao3@cnooc.com.cn。
1673-1506(2016)03-0121-06
10.11935/j.issn.1673-1506.2016.03.019
TE27+1
A
2015-11-24 改回日期:2016-01-16
* “十二五”国家科技重大专项“海上稠油油田高效开发示范工程 (编号:2011ZX05057) ”部分研究成果。
谢涛,赵少伟,杨保健,等.随钻陀螺测斜系统设计及测试试验[J].中国海上油气,2016,28(3):121-126.
Xie Tao,Zhao Shaowei,Yang Baojian,et al.Design and test of gyroscope inclination survey while drilling system[J].China Offshore Oil and Gas,2016,28(3):121-126.
