基于激光点云的沉陷区水平位移求取方法研究
2016-06-08阎跃观李雪松黄志华
刘 杰,阎跃观,李 军,李雪松,黄志华
(中国矿业大学(北京)地球科学与测绘工程学院,北京 100083)
基于激光点云的沉陷区水平位移求取方法研究
刘杰,阎跃观,李军,李雪松,黄志华
(中国矿业大学(北京)地球科学与测绘工程学院,北京 100083)
[摘要]三维激光扫描技术可用于监测沉陷地表或地物的垂直方向沉降,但由于缺少同名点信息,很难利用激光点云数据监测沉陷区的水平移动。通过构造水平移动的虚拟监测点,提出了一种水平移动的求取方法。首先,以房屋的移动量代替地表的移动量,将房屋点云的重心作为虚拟监测点;然后,以房屋特征点为参照对开采前后房屋点云数据进行人工粗配准,再使用ICP配准算法进行精确配准;最后,求取配准前后虚拟监测点的空间位置差值,从而求出水平移动量。通过实测点云数据对该方法进行应用研究,证明了该方法的有效性。
[关键词]水平位移;三维激光扫描;沉陷监测;重心坐标;ICP 算法
为了避免或减少矿山开采造成的损害,需要对沉陷区地表进行变形监测。传统方法是在工作面上方布设线状的观测站,通过全站仪和水准仪来获取监测点的形变,从而得到地表的形变。这种监测方法有以下不足之处:沉陷区监测点的布设受地形条件的限制,易破坏、不易维护;监测范围一般都是沿工作面走向或倾向的线状区域,监测周期比较长[1]。三维激光扫描仪作为获取数据的一种新手段,能够无接触、快速、准确、全天候地获取目标点云数据[2],且不需要布设固定点,同时获取的是点云面状数据,能够全面准确地反映沉陷区地表和建筑物形态。例如,有学者通过对比煤层开采前后点云所构建的DEM来得到地表的沉降量,从而来反演预计参数[3-4]等等。
但是,三维激光是通过无接触盲目式的扫描获取点云数据,无法在两次扫描的点云数据中找到同名点对,使水平移动量的求取变得困难。很多学者在这方面也做了较深入地探讨,例如:张舒等提出在工作面上方布设少量固定点来求取水平移动量[5],但这样做增加了成本和额外的工作量;戴华阳等将多次手动点取点云中房屋角点位置附近的点,取其平均位置坐标作为监测点来求取水平移动量[6],这种手动量取方法受人为因素影响比较大,精度难以保证;敖建锋等通过点云拟合房屋的角点作为监测点求取移动量[7],这种方法对点云的质量要求比较高,并且容易受噪点的影响。针对上述问题,本文提出了一种基于Iterative Closest Point(ICP)精确配准算法的水平移动求取方法。
1ICP算法概述
ICP算法是由Besl等提出的一种高层次的基于自由形态曲面的配准方法,迭代使距离误差最小化。基本思想是:对于初始点云中的每一个点,把目标点云中距离其最近的点作为与之相对应的点(即理想状态下的同名点),并计算所有对应点的欧式距离平方的平均值,然后通过迭代算法使这个平均值最小化,并同时更新点云之间的相对位置,当这个平均值小于所设定的阈值时,迭代停止[8]。
但是,ICP算法只有在较好的初始配准条件下才能获得比较高的配准精度。初始点云与目标点云配准前相对位置对算法影响很大,直接影响ICP算法的收敛速度以及是否收敛于正确的位置。所以,在进行ICP算法配准之前需要进行初始配准[9]。
2水平移动的求取方法
由于在激光点云数据中无法找到同名点对,本文构造了一个虚拟监测点:煤层开采后扫描的房屋局部区域点云重心。相对于地表移动盆地,房屋的尺寸比较小,煤层采出后,可以认为房屋局部区域只是在某个方向产生了移动,点云重心的移动量也就是房屋的移动量。因此,需要求出煤层开采后房屋局部点云的重心坐标及开采前这些点云的重心坐标,二者之间的差值就是水平移动量。
如何求取开采后扫描的房屋点云在开采之前的重心坐标成为了关键。由于现有的配准算法已经比较成熟,特别是ICP迭代算法的配准精度比较高,所以,本文使用ICP配准算法将开采后的点云与开采前的点云进行配准使其还原到开采前的状态,求解配准前后监测点水平面内位置的变化作为水平移动量。配准的精度越高,求取的水平移动量的精度越高。
2.1数据的获取及预处理
变形监测中,获取数据的质量直接决定监测结果好坏。在三维激光扫描中除了仪器自身误差和目标物体反射面误差,数据配准误差对扫描精度的影响比较大。
由于沉陷区范围较大,建筑物比较多,通视条件不好,往往要多次架站才能采集完整的点云数据,为了统一各个扫描站的坐标系,需要对各站点云配准。为了保证监测结果的可靠性,防止配准误差的累积,本文采用了控制点配准方法。
在三维激光扫描之前先在沉陷区布设控制网,用全站仪和水准仪获取控制点的精确坐标,然后利用扫描仪和全站仪同时测量,如图1所示。利用全站仪测出靶标的全局坐标,然后用扫描仪测出靶标在局部坐标系中的坐标,最后通过4个靶标求取每一站局部坐标系与全局坐标的转换参数,把每一站的局部坐标都配准到全局坐标系上,避免了配准误差的累积,保证了监测的精度。

图1 站点布设示意
为避免将粗差带入到变形监测分析中,需要去除点云数据内可能包含的不稳定或者错误点。去噪算法有很多,如基于数学形态学滤波方法、基于最小二乘拟合的滤波算法等。但是,单一的算法很难适应所有的点云数据,所以本文采用常规的人机交互去噪方法[10]。
2.2计算方法及步骤
首先手动量取房屋移动量的粗值作为初始配准的参数,然后借助ICP配准算法的优越性,将开采后的房屋与开采前的房屋进行精确配准,最后比较配准前后房屋点云重心坐标的差值求取水平移动量,求解流程图见图2。
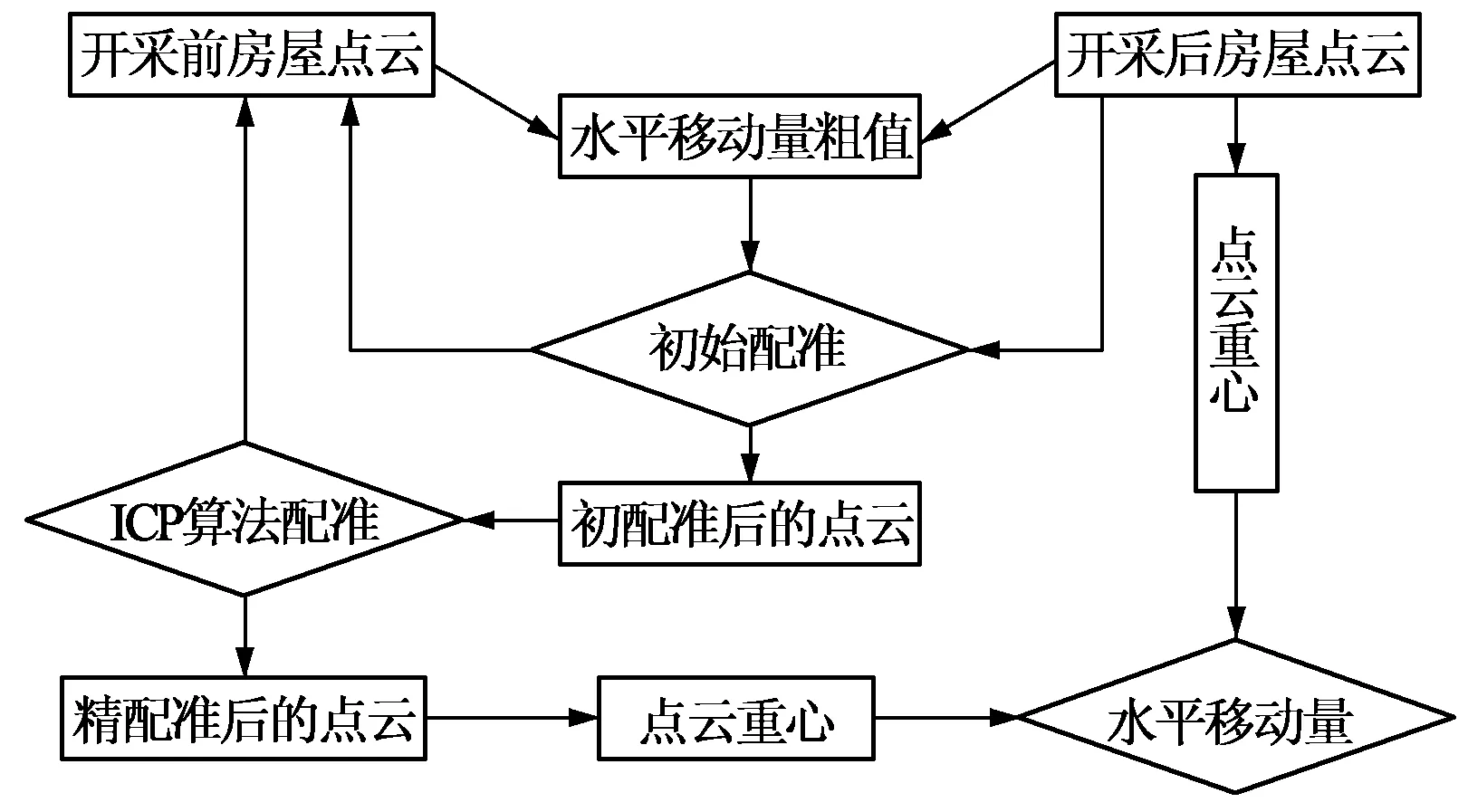
图2 求解流程示意
(1)初始配准首先手动量取房屋角点开采前后的坐标分别为(X1,Y1,Z1),(X2,Y2,Z2),用式(1)求出角点移动变形量的粗值记为(ΔX,ΔY,ΔZ)。同时求取开采后房屋点云坐标的平均值作为重心坐标(X0,Y0,Z0)。
(1)
然后用(2)式对开采后房屋的所有点云进行初始配准得到开采后房屋初始配准后的点云坐标(X3,Y3,Z3)。
(2)
(2)精确配准开采后房屋点云经过初始配准后与开采前点云的相对位置,能够满足ICP算法对于初始位置的要求。通过ICP迭代算法将初始配准后的点云配准到开采前的点云上,其单点转换公式为
(3)
式中,R(α,β,γ)为三维旋转矩阵;(X4,Y4,Z4)为移动参数;(X1,Y1,Z1)为开采前的点;(X3,Y3,Z3)为改正后的点。
(3)求取水平移动量最后计算出配准后点云的重心坐标(X5,Y5,Z5),求出开采后房屋点云配准前后重心坐标之差即为房屋的移动量(X,Y,Z),如公式(4)所示。
(4)
3应用研究
采用RIEGL VZ-4000三维激光扫描仪对某矿区进行扫描获得开采前后两期点云数据。由于工作面上方有一条省道,两旁分布了很多房屋,两次数据的采集都是沿着公路进行。扫描之前在公路上布设的控制导线,然后用扫描仪获取矿区地表的点云数据。
对开采前后的点云进行分析,沿着省道选取了16处房屋,如图3,图中的北方向为Y,东方向为X,坐标系满足右手定则。

图3 水平移动矢量图
通过手动量取开采前后房屋角点的坐标值解算出房屋移动量的粗值(ΔX,ΔY,ΔZ),见表1。

表1 房屋水平移动量的粗值 mm
ICP算法精确配准后解算出来房屋移动量的精确值(X,Y,Z),见表2。然后将水平移动量绘制成矢量,如图3所示,可以看出移动的方向都是指向采空区。

表2 ICP配准后房屋水平移动量 mm
对开采前后的房屋点云进行对比分析,如图4所示。图4(a)为开采前后同一房屋点云在同一坐标系下的位置关系,由图可知房屋受开采影响发生了明显的水平移动,从这个图上来量取房屋的移动量粗值作为初始配准参数;图4(b)为开采后的点云经过初始配准后效果图。可以看出,调整后的点云与开采前的点云基本重合,但是放大来看还是有明显分层;图4(c)为精确配准后点云效果图,放大后分层消失,说明沉降后的点云采用ICP算法配准后能较好还原到初始状态,从而求取的水平移动量的精度比较高。

图4 点云对比
4结论
(1)针对基于激光点云数据沉陷区水平移动不易求取的问题,通过构造监测点,借助ICP的精确配准算法,将煤层开采前后房屋移动量转换为开采后房屋点云配准前后重心坐标的差值,从而求取房屋的水平移动量。
(2)对矿区实测的点云数据进行应用研究,结果表明,通过ICP配准算法能够将开采后房屋点云很好地还原到开采前的状态,验证了其求取水平移动的可行性,促进了三维激光扫描技术在沉陷监测中的应用。
[参考文献]
[1]何国清,杨伦,凌庚娣,等.矿山开采沉陷学[M].北京:中国矿业大学出版社,1994.
[2]马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[3]胡大贺,吴侃,陈冉丽.三维激光扫描应用于开采沉陷监测研究[J].煤矿开采,2013,18(1):20-22.
[4]周大伟,吴侃,周鸣,等.地面三维激光扫描与RTK结合建立开采沉陷观测站[J].测绘科学,2010,36(3):79-81.
[5]张舒,吴侃,王响雷,等.三维激光扫描技术在沉陷监测中应用问题探讨[J].煤炭科学技术,2008,36(11):92- 95.
[6]戴华阳,廉旭刚,陈炎,等.三维激光扫描技术在采动区房屋变形监测中的应用[J].测绘通报,2011(11):44-46.
[7]敖建锋.动态沉陷区地面激光扫描数据处理关键问题研究[D].北京:中国矿业大学(北京),2015:69-83.
[8]Besl P Makay.A Method for Registration of 3D Shape[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1992(14): 239-256.
[9]郑德华.ICP算法及其在建筑物扫描点云数据配准中的应用[J].测绘科学,2007,32(2):31-32.
[10]严剑锋.地面LiDAR点云数据配准与影像融合方法研究[D].徐州:中国矿业大学,2014.
[责任编辑:施红霞]
Solution Method of Horizontal Displacement of Subsidence Zone Based on Laser Point Cloud
LIU Jie,YUAN Yue-guan,LI Jun,LI Xue-song,HUANG Zhi-hua
(1.Geoscience and Surveying Engineering College,China University of Mining & Technology(Beijing),Beijing 100083,China)
Abstract:Three dimensional laser scanning technology could be used for subsidence monitoring of surface and buildings,which appeared in vertical direction.But horizontal displacement of subsidence zone was difficulty to be monitored with laser point cloud data as lack of information of the same point.Then a solution method of horizontal displacement was put forward according constructed virtual monitoring points of horizontal displacement.First,surface displacement was substituted by house displacement,the gravity center of house point cloud as virtual monitoring pointing,and then took characteristic points of house as reference object,artificial calibrated was applied on house point cloud data that collected from begin and after mining,then precise calibrated was applied based on ICP calibration method.Spatial position difference of virtual monitoring points that before and after calibration was calculated,and then horizontal movement displacement was solved.The validity of the method was proved by application and studying of measured point cloud data.
Key words:horizontal displacement;3-D laser scanning;subsidence monitoring;gravity center coordinate;ICP method
[收稿日期]2015-08-19
[基金项目]国家自然科学基金资助项目(51404272);高等学校博士学科点专项科研基金(20110023110014);中央高校基本科研业务费专项资金项目(2010QD01,2010YD05)
[作者简介]刘杰(1991-),男,河南正阳人,在读硕士研究生,从事三维激光扫描应用和开采沉陷研究工作。
[中图分类号]TD173.4
[文献标识码]A
[文章编号]1006-6225(2016)02-0099-04
[DOI]10.13532/j.cnki.cn11-3677/td.2016.02.026
[引用格式]刘杰,阎跃观,李军,等.基于激光点云的沉陷区水平位移求取方法研究[J].煤矿开采,2016,21(2):99-102.
