船用压力水柜控制系统的设计
2016-06-06林文城
林文城
(厦门海洋职业技术学院,福建厦门 361012)
船用压力水柜控制系统的设计
林文城
(厦门海洋职业技术学院,福建厦门361012)
摘要针对传统船舶压力水柜控制系统存在的问题,以某货轮淡水压力水柜为例,开发出基于PLC变频技术的自动控制系统,减轻轮机技术人员的劳动强度,同时提高了压力水柜运行过程中的平稳性以及节能减排和可靠性等方面的技术要求。
关键词压力水柜;PLC;变频技术
某轮设置有3套压力水柜系统,分别为船员和设备提供淡水、饮用水和海水。以淡水压力水柜为例,安装在泵和用户之间的管路上,从空气瓶中引入高压空气充注柜体上部空间,同时利用旋涡泵作为给水泵对柜体下部空间进行间断供水,这样,压力水柜类似蓄能器,可以随时向外提供高压淡水。
1存在的问题
该轮淡水压力水柜采用压力继电器来控制给水泵的运行,向外供应淡水时,压力水柜内的水位将下降,压力随之降低,当压力值下降到设定值的下限0.25MPa时,利用压力继电器启动给水泵,向压力水柜内补水;而补水时水位上涨,水柜内空气被压缩造成压力的增加,当压力升高至设定值的上限0.4MPa时,压力继电器将切断给水泵电机的电源,补水结束。另一方面,在压力水柜正常工作过程中,上部空间内的空气将不断溶解在水里导致质量的下降,失去缓存效果,这样将造成水位过度升高且水压波动剧烈,当向外供水后,水柜内压力迅速降低,导致给水泵频繁启动和停车,提供给用户的水压也达不到要求。考虑到空气量变化带来的影响,值班轮机员要经常检查压力水柜内水位和空气压力,发现空气量不足时,打开压力水柜下部的泄放阀放掉柜内多余的水,水位也达到设计数值时关闭泄放阀,开启充气阀进行补气,当水柜压力达到上限值时关闭充气阀,避免补气量过多导致安全阀开启和给水泵背压过大耗能。所以传统压力水柜运行控制模式,不但增加值班轮机员的劳动强度和心理负担,而且无法保证该系统长期稳定的工作。
2水位控制系统控制原理
基于以上分析,对压力水柜水位控制可以考虑用变频技术的连续控制代替现有的双位控制。利用PLC技术,根据水位传感器检测压力水柜中的水位,只要水位偏离给定值,系统就会产生控制作用,自动调节给水泵的转速,力图消除偏差的存在,所以其能将水位稳定在设定值上,同时也避免出现水泵给水量过多的问题,保持供水与用水之间的平衡。同时压力水柜内压力采用双位控制,因水位波动小,故用压力继电器控制充气阀的通断就可以实现水柜内压力的基本稳定,因篇幅所限,本文就不多作阐述。
3压力水柜控制系统的硬件组成
采用SIMATIC PLC s7—200作为压力水柜控制系统的可编程控制器,实时的离散信号和模拟信号通过SIEMENS EM231模块传至CPU,系统将根据输入的测量值、控制设定值及PID参数进行PID运算,运算得到数字信号经过SIEMENS EM232模块后控制MM440变频器,从而实现给水泵电机的无级调速控制,保证压力水柜中的水位基本维持在设定的数值上。此外,选择TP-177A触摸屏借助通信电缆与PLC互连,在人机界面上设定和显示压力水柜的水位和压力等状态参数数值,调整数据监测间隔时间,并提供系统异常时的故障产生原因。
4水位控制系统的软件设计
针对PLC控制内容的设计情况,采用STEP7-Micro/WIN编程软件进行程序的编辑、监控和调试。针对船用压力水柜系统的运行特点和技术要求,PLC控制系统由主控程序、信号采集、工艺流程和输出控制等4个模块组成,其中主控程序流程图如图1所示。

图1 主控程序流程图
4.1信号采集
输入信号包含离散信号和模拟信号。当输入端是离散信号时,输入端的设备类型为限位开关、按钮、压力继电器、继电器触点、选择开关和光电开关等。当输入为模拟量输入时,输入设备为压力传感器、水位传感器、流量传感器和电压传感器等。将PLC采集的信号数值依次放在状态寄存器内。
4.2控制系统的保护和报警
压力水柜的报警和保护性停车主要表现在水位偏离设定值、气压偏离设定值、补气压力过低和给水泵排压过高等方面。
4.3PID运算
如图2所示,控制系统使用PLC s7—200对压力水柜水位实现PID计算。在采集运行参数中,压力水柜水位是闭环控制的最重要参数。利用浮球式液位变送器作为水位传感器,依靠磁性浮球漂于液面之上并沿装有测量元件的导管内上下移动,可以在外磁作用下将被测液位信号转换成正比于液位变化的电阻信号,并将电子单元转换成0~5V电压标准信号输出,该电流信号经过A/D模块进行模数转换成数字信号。运用PID程序计算该反馈值Pv(t)与给定值Sp(t)两者的偏差e(t),根据运算的结果PLC输出相应数字信号。该数字信号数模转换后,输出0~5V电压标准信号M(t),控制变频器从而调节电机的转速和给水泵的流量,凭借对压力水柜内水位的连续控制来实现水位维持在设定值附近。
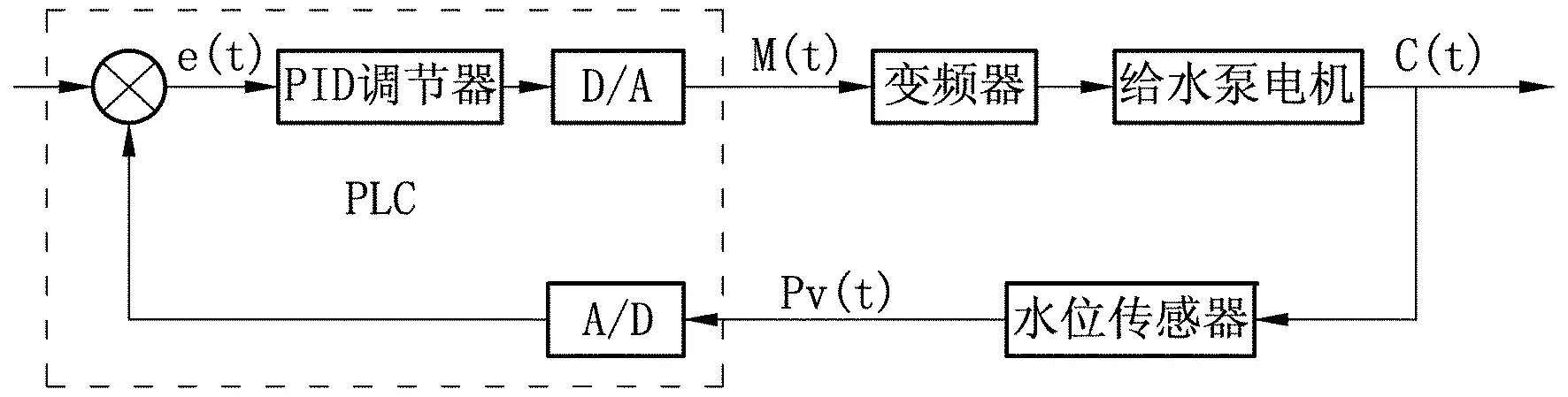
图2 闭环控制系统方框图
PID控制器的输入输出的关系式为:
(1)
式中:e(t)=Sp(t)-Pv(t)为水位偏差;Sp(t)为水位设定值;Pv(t)为水位反馈值;M0为回路输出的初始量,M(t)为控制器的输出量;c(t)为压力水柜水位量;KC为PID回路增益;T1为积分时间常数;TD为微分时间常数。本控制系统中的KC、T1和TD可以通过工程计算初步确定。若PLC设置采集运行参数数值周期T,可以将式(1)离散化,得到离散化的PID控制算法表达式,即第n次采样时的控制器输出算法表达式为:
(2)
其中M(n)为第n次数据采样时调节器的输出;KP为比例系数;T为数据采样周期;n为数据采样序号,n=0,1,2……;e(n)、e(n-1)为第n次和第(n-1)次数据采样时的偏差值。
4.4变频器的调速控制
变频器常用调速的方法有键盘调速、多段调速、通信调速和外部模拟量调速等。其中模拟量调速使用简单,而且还能实现无级调速,本文选择该方法进行调速,PLC、EM232、变频器和电动机的连接如图3所示。该轮的工频为50Hz,EM232模拟量模块的数字量输入范围为0~32000,其模拟量输出范围是0~5V电压。将频率的数值0~50对应的PLC数值0~32000存到VD106~VD306中,也就是把数值0~32000等分为50份,每份640,分别存入VD106~VD306中。这个程序段是初始化程序段。
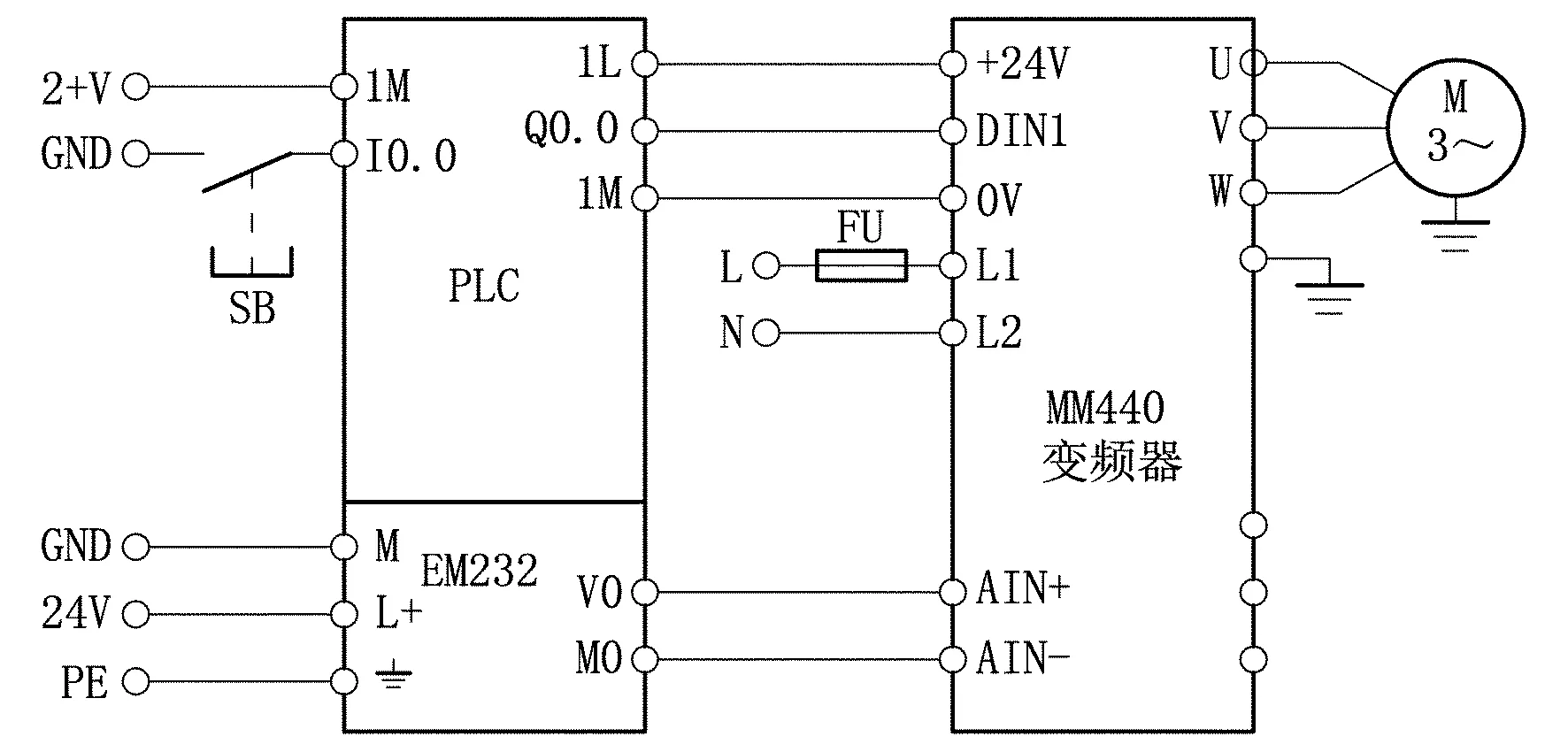
图3 控制系统连线图
将VW100存入频率值,这个数值一般只能由PLC的上位机给定,PLC编程时只能给一个初始值(频率的设定方法可以用触摸屏或者组态软件完成)。将这个给定数值乘以4,再加上VB106的首地址,这样可以找到对应的PLC数值0~32000中的一个数值,再转换成0~5V电压信号,由AQW0输出,控制变频器0~50Hz输出。
在本文水位控制系统中,根据对压力水柜设定水位值和水位反馈值的PID计算结果,实时调节给水泵电机的转速,完成对压力水柜内水位的控制。
5结语
利用PLC控制变频器实现给水泵电动机无级调速技术,确保压力水柜的水位和压力基本稳定在设定值上。与传统半自动控制方法相比,该控制技术一方面降低值班轮机员的劳动强度,另一方面在技术上表现出明显优势:控制精度高,水位波动小,避免给水过量调节;减少给水泵电机频繁启停,节约耗能;减轻给水泵的气穴现象,避免全速运转下机械磨损、噪音和震动,延长设备和管路的使用寿命。
参考文献
1向晓汉. 电气控制与PLC技术[M]. 北京: 人民邮电出版社, 2009
2何宇峰. PLC在制冷机改造中的应用[J]. 制冷, 2008 (2): 84-87
3陈亮,陈华. 模糊控制策略在火电厂汽包水位控制中的应用[J]. 工业控制计算机, 2013 (2): 70-70
4张保盛,曹莉. 锅炉汽包水位三冲量控制系统的设计[J].机械工程与自动化, 2012, (6): 154-156
5鲍存会. 锅炉汽包水位监控系统及可靠性[J].陕西理工学院学报:自然科学版, 2011 (2): 20-23
(责任编辑:谭银元)
The Designing of the Control System of Marine Pressure Tank
LIN Wen-cheng
(Xiamen Ocean Vocational College, Xiamen 361012, China)
Abstract:According to problems existing in the traditional marine tank pressure control system, with a fresh water pressure tank as an example, this essay develops an automatic control system based on PLC frequency conversion technology, which can reduce the labor intensity of turbine technical personnel, and meanwhile improve the stability of the pressure tank operation, energy conservation, emissions reduction and reliability, etc.
Key words:pressure tank; PLC; frequency conversion technology
中图分类号U664.8
文献标志码A
文章编号1671-8100(2016)01-0017-03
作者简介:林文城,男,副教授,硕士,研究方向:船舶辅机自动控制和维护管理。
收稿日期:2015-11-02
