基于以太网的第2代分布式列车网络控制系统(DTECS―2)
2016-06-01杨奇科
赵 冬 杨奇科 叶 彪
(中国中车株洲电力机车有限公司,412001,株洲∥第一作者,工程师)
基于以太网的第2代分布式列车网络控制系统(DTECS―2)
赵 冬杨奇科叶 彪
(中国中车株洲电力机车有限公司,412001,株洲∥第一作者,工程师)
摘 要长沙市轨道交通1号线车辆采购项目的其中1列车被要求采用基于以太网的第2代分布式列车网络控制系统。介绍了该系统的功能需求、系统架构、系统性能,并与传统的基于MVB(多功能车辆总线)的分布式列车网络控制系统进行了比较。
关键词地铁列车;分布式列车网络控制系统;以太编组网
Author's address CRRC Zhuzhou Electric Locomotive Co.,Ltd.,412001,Zhuzhou China
随着经济和社会发展,现代轨道交通装备制造业正向着高速化、智能化、集成化进行跨越式的高速发展。分布式网络控制技术由于拥有集成化高、智能化高、维护简便、成本低等优势,已成为现代轨道交通装备制造特别是车辆集成制造的关键技术之一,且随着大量使用分布式网络控制技术的轨道交通车辆得到越来越多的用户使用,该技术变得日趋成熟、稳定,成为轨道交通车辆的标准配置。然而,用户对该技术提出了更加复杂的要求,如希望能够实现更加快速的响应、更加高的集成化、更加高的性价比等,要求实现网络远程诊断与维护、旅客信息与舒适性支持、统一高效的智能化决策支持等。
近年,工业交换式以太网技术异军突起。由于具有优异的高速传输性能、开放的网络协议栈、几乎任意的扩展性能、多样的产品设计制造商、丰富的测试验证手段等优势,其逐渐垄断了工业自动化和过程控制市场。在轨道交通用户和业内专家组织的共同推动下,IEC TC 9(The International Electrotechnical Commission Technical Committee 9:Electrical Equipment and Systems for Railways)起草,并于2014年3月正式发布IEC 61375-3-4《轨道交通电气设备—列车通信网络—以太编组网》标准(以下简称“ECN标准”),为实现市场对轨道交通装备制造业提出的更高要求注入了新的技术力量。
中国中车株洲电力机车有限公司目前正在生产的长沙市轨道交通1号线车辆采购项目(以下简称“CSL1项目”)共包含23列列车(B型车辆,6节编组),列车以带司机室拖车(Tc车)、带受电弓动车(Mp车)和不带受电弓动车(M车)各2节按照=Tc -Mp-M*M-Mp-Tc=的基本编组方式构成。其中,22列车仍采用中车时代电气提供的基于传统MVB(多功能车辆总线)分布式列车网络控制系统(以下简为DTECS系统);1列车作为概念性研发,采用中车时代电气提供的基于ECN标准的第2代分布式列车网络控制系统(以下简为DTECS—2系统),该车由公司完全独立研发并具有自主知识产权,是首次装车尝试,它将为未来列车网络控制系统升级和研究性试验提供案例和平台。
本文对DTECS—2系统的有关功能需求、系统架构、系统性能作简要分析,并与DTECS系统进行一系列比较。
1 系统功能
DTECS—2系统的整车集成应用功能如下:
(1)列车控制及监视,包括列车控制设备(含所有车载分布式微机控制模块、司控器、主断路器以及与运行安全相关的I∕O(输入∕输出)信号)的通信、控制、信息显示、事件记录等功能。
(2)列车控制设备的故障诊断与安全导向。
(3)开放的软件接口,方便用户或整车系统集成商进行应用层开发。
(4)车载多媒体设备(如视频监控和音视频媒体)的网络化传输,实现媒体网络与控制网络的数据交互。
(5)系统与车地无线通信网络的无缝接入,实现入库数据自动下载。
上述(1)、(2)、(3)功能均在DTECS系统中得到成熟应用。DTECS—2系统的功能与DTECJ系统类似,但其将车载多媒体设备以及车地无线通信网络接入到系统中,在布线简单化和经济性方面具有优势。
目前DTECS—2系统尚处于概念性研发阶段,为保证其可靠性和兼容性,在硬件结构设计上考虑采用以太网系统和MVB系统共有的形式。其具体构成形式为:列车级控制总线采用ECN环网方式,车辆级控制总线采用MVB与ECN共用的方式,实现列车监控系统(TCMS)、牵引控制系统(DCU)、辅助供电控制系统(SIV)、制动控制系统(BCU)、列车自动驾驶系统(ATS)、车门控制系统(EDCU)、乘客信息系统(PIS)、空调控制系统(HVAC)、视频监控系统(CCTV)和车地无线通信系统(WAN)互联互通。TCMS包括以太网版本列车控制模块(VCM -M)、车辆控制模块(VCM)、事件数据记录模块(EDRM)、人机操作模块(HMI)、数字量输入∕输出模块(DXM)、模拟量输入输出模块(AXM)、以太网版本列车数字量输入输出模块(EIOM))。
CSL1项目的DTECS—2系统列车级控制拓扑结构如图1所示。
2 系统结构

图1 DTECS—2系统列车级控制硬件拓扑结构图
其中ECNN为DTECS—2系统专用以太网交换机。该系统利用一套以太网列车环网构成列车级核心交换网。目前,该列车核心交换网的传输速率为100 Mbit∕s。
ECNN有16个100 Mbit∕s全双工以太网端口、1个DEBUG端口、1个CONSOLE端口和1个电源接口,具有连接速度及双方连接自动协调、自动交叉,以及自动极性、自动发现、自动路由和自动地址分配(DHCP和DHCP中继)功能,基本实现零配置即插即用。必备的生成树协议(Spanning Tree Protocol∕Rapid Spanning Tree Protocol IEEE 802.1d∕802.1w)提供了组建以太环网的功能,且生成树自愈时间达到ms级别。DEBUG端口和CONSOLE端口提供不同管理级别的网络管理功能,可以使用通用的SSH或SNMP(V1)等开放协议方便地进行管理和调试。
在DTECS—2系统车辆级控制系统中,Mp车和M车结构相似,Tc车和Mp车∕M车结构有非常大的不同。DTECS—2系统Tc车车辆级控制拓扑结构如图2所示。Mp车、M车车辆级控制拓扑结构如图3所示。其中,硬线I∕O信号主要指涉及到司机操作以及安全相关的列车线信号。
在DTECS—2系统中每节车都有一个VCM,该模块基本上不承担控制和逻辑判断的功能,主要是将MVB总线的数据转换为以太网数据发送到以太网列车线上,其DTECS系统中的逻辑控制功能(包括司机室激活控制、方向选择控制、紧急牵引控制、高速断路器开闭控制、空电联合制动控制、保持制动控制、安全连锁控制、库用电源和库内动车控制、空调启动顺序控制、扩展供电控制)在DTECS—2系统中由VCM-M模块来完成。
由于ATS和EDCU暂时没有接入到DTECS—2系统的以太网接口,Tc车的PIS和CCTV的控制命令(如报站命令等)仍然需要由MVB总线授予。Mp车、M车的PIS和CCTV可直接读取媒体以太网的音视频信息,因此不必再接入到MVB总线。
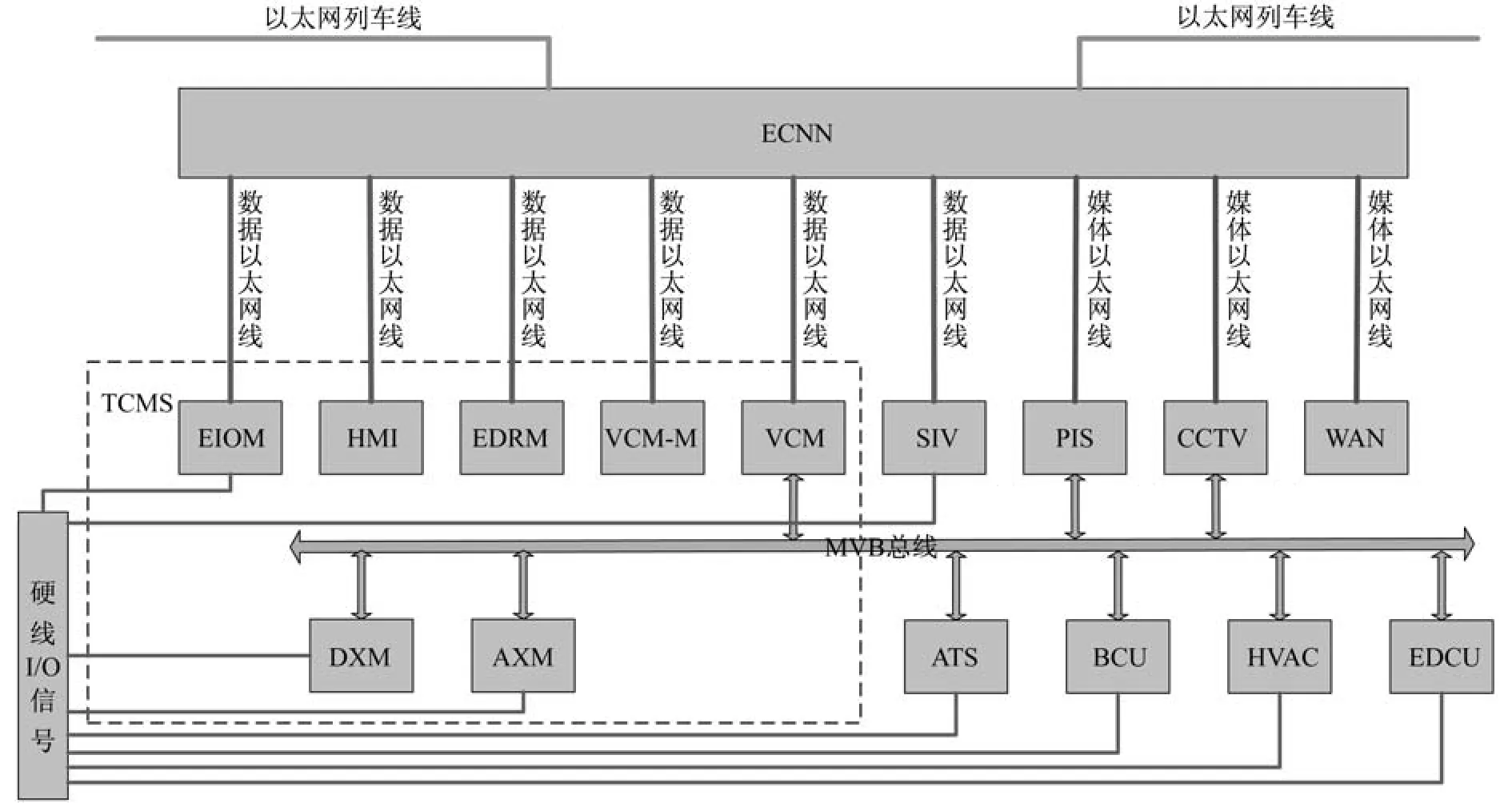
图2 DTECS—2系统Tc车车辆级控制硬件拓扑结构图
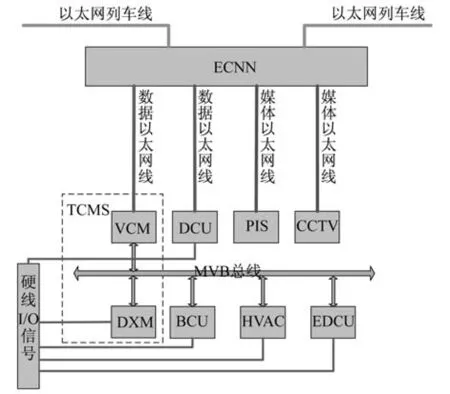
图3 DTECS—2系统Mp车、M车车辆级控制硬件拓扑结构图
另外,在ECNN内部,将媒体以太网与数据以太网划分为不同VLAN(虚拟局域网),利用IGMP (Internet Group Management Protocol)协议对媒体数据和控制数据设定不同的优先级并进行组播∕多播,设定不同的QoS(服务质量)等级,以保证在交换网络中媒体数据与控制数据以规定队列发送∕接收,有效利用带宽,减少冲突。
由此可以看出,DTECS—2系统的拓扑结构比传统DTECS系统的拓扑结构要复杂一些,而且需要增加VCM-M、EIOM、ECNN等模块,每节车都必须有一个VCM模块。这将给成本、总体设备布置设计以及调试等方面带来一些困难,但该系统将PIS、CCTV等设备独立网络或独立硬线集中到TCMS网络中,对于布线以及故障处理等方面则带来了不小的便利。
3 系统性能
根据IEC 61375系列标准,列车通信网络属于实时网络,因此,实时性、可靠性是列车通信网络系统的重要性能指标。对于地铁列车网络控制系统,设计过程中主要参考的技术指标有网络通信速率、支持的数据类型、端口种类和数量、数据传输距离、网络节点类型和数量、主要数据导致的网络负荷、网络延迟、可靠性保障方式、可维护性保障方式、协议开放性、成熟应用案例以及成本价格等。限于篇幅,本文仅对DTECS—2系统的主控模块网络负荷和网络延迟进行计算分析。
3.1主控模块网络负荷计算
DTECS—2系统与传统DTECS系统均属于列车通信网络(TCN),其网络数据可分为3种数据类型:用于轮询牵引、制动、紧急制动、超速保护等信息,以及对实时性要求非常严格的周期性过程数据;用于响应司机室查询等操作的偶发性随机数据;用于设备配置、设备状态监视和故障诊断的偶发性消息数据。
首先,需要明确哪些数据参与主控模块网络负荷计算。
媒体数据和控制数据分别属于不同的组播∕多播组,主控模块CPU(中央处理器)不接收和处理媒体数据包。此外,偶发性的随机数据包和偶发数据包在理论计算时是不可预测的,其数学统计模型符合帕累托分布和泊松分布,对于主控模块的网络负荷非常小,因此偶发性数据负荷计算不在此列。本文仅分析过程数据包对于两种系统中主控模块所产生的网络负荷。
对于分布式计算系统,主控模块的网络负荷通常用模块单位时间内接收和发送的数据包数量来进行评判。其计算式如下:
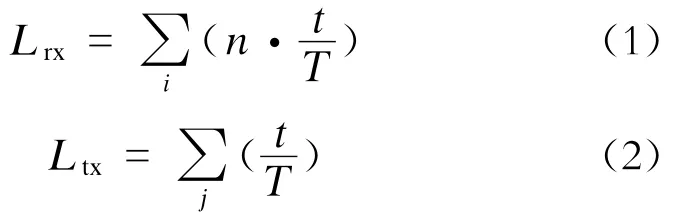
式中:
Lrx——主控模块网络接收负载;
i——过程数据类型的数量;
n——列车中设备的数量;
t——单位时间,通常取1 s;
T——过程数据交换周期;
Ltx——主控模块网络发送负载;
j——不同过程数据交换周期的数量。
注:每一次过程数据的交换都需要主控模块接收并处理1个过程数据应答数据包。相同的过程数据交换周期内,主控模块仅需要组播∕多播1个过程数据请求数据包。
表1列出了DTECS—2系统中其他模块与VCM-M发生过程数据交换的时间周期。
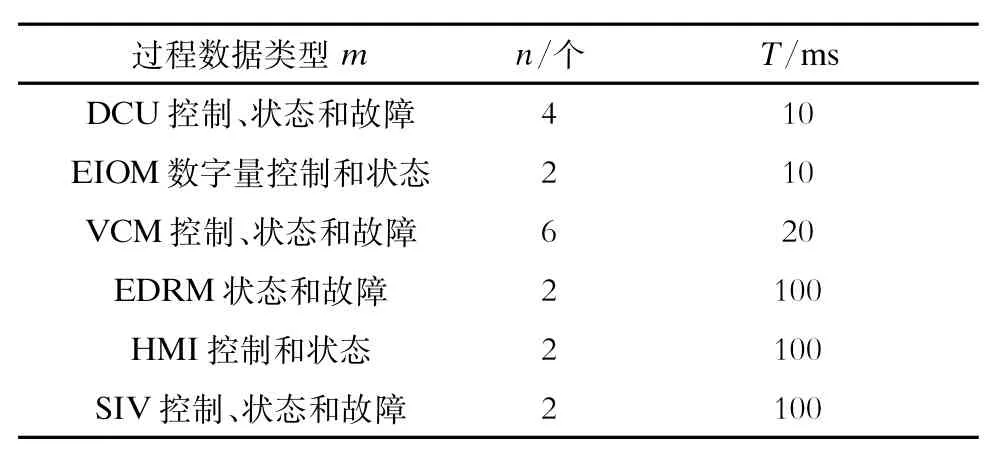
表1 DTECS―2系统中其他模块与VCM―M发生过程数据交换的时间周期
将表1数据代入式(1)、式(2),可得VCM-M网络的接收负载(数据包)为960个∕s,发送负载(数据包)为160个∕s。
表2中描述了DTECS系统中其他模块与VCM发生过程数据交换的时间周期。
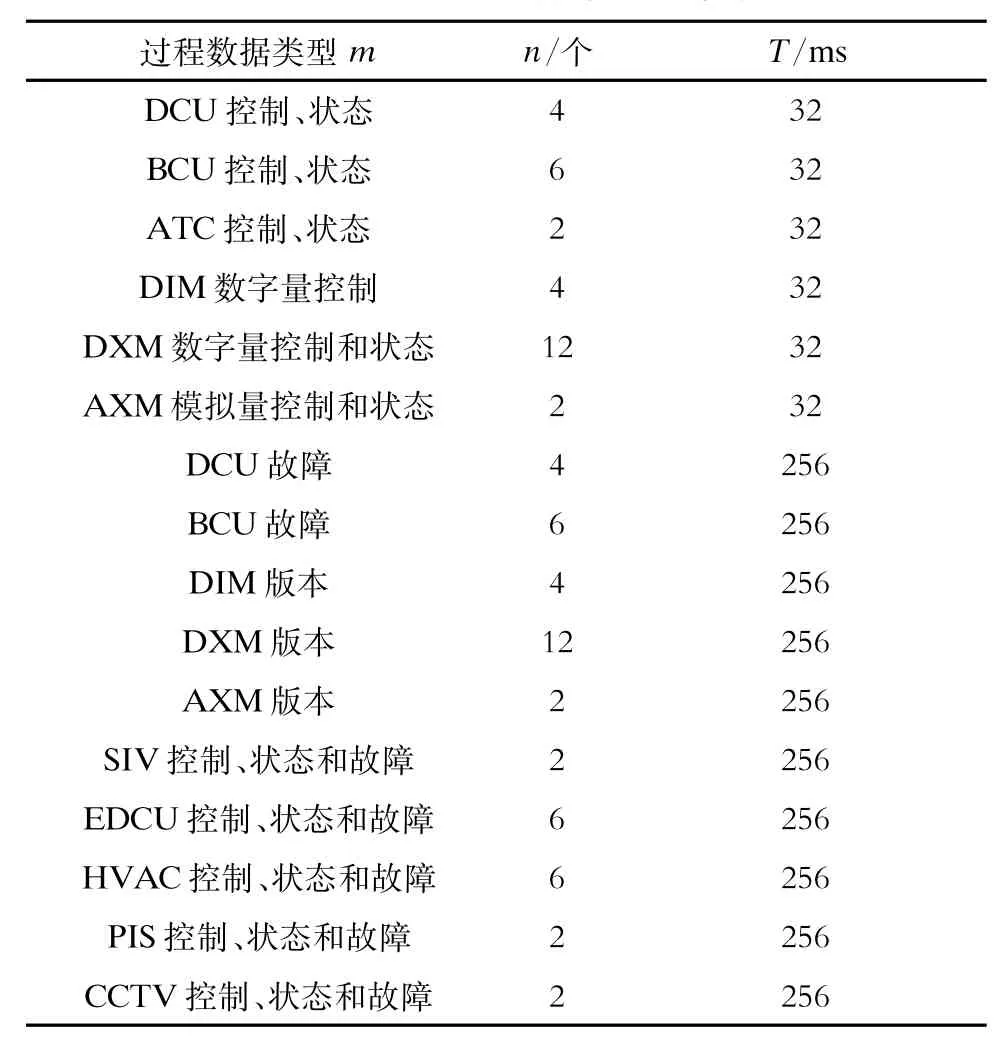
表2 CSL1项目的DTECS系统中其他模块与VCM发生过程数据交换的时间周期
将表2数据代入式(1)、式(2),可得VCM网络的接收负载(数据包)为1 117.2个∕s,发送负载(数据包)为35.2个∕s。
3.2网络时延
DTECS—2系统与传统DTECS系统均属于共享介质型网络,即同一时刻只能有一个数据帧在网络中传输。但是对实时性要求较高的TCN,二者均采用了优化的介质分配方法,如在DTECS—2系统中利用优化的媒体访问控制(MAC)过程,实现了全双工交换式以太网,而在DTECS系统中有总线主角色进行总线传输仲裁。因此,本文仅计算数据帧在两种系统中无碰撞传输的理论最大时延。
在DTECS—2系统中,数据帧经过交换机进行传输,其传输时延包括四部分:帧收发时延、交换时延、线路传输时延、帧排队时延。数据帧经过一个交换机的最大时延可由下式计算:
Lmax= m(Lsf+Lsw+Lwl+Lq)(3)式中:
Lmax——数据帧在整个交换网络中传输的最大时延;
m——数据帧需要经过的最大ECNN数,在CSL1项目中ECNN共有6个;
Lsf——数据帧收发最大时延,以太网数据帧最大为1 000字节,传输速度按100 Mbit∕s计算,Lsf=80μs;
Lsw——最大交换机转发时延,其取决于交换机的内部特性,根据经验,Lsw=3.5μs;
Lwl——最大线路传输时延,其取决于网络线缆特性和线缆长度,网络线路采用双绞线,在最恶劣的传输条件下,双绞线缆信号传输速率取2∕3光速,以太网中单根线缆最大长度为100 m,Lwl=0.5μs;
Lq——数据帧排队时延(即数据帧转发等待时间),其为概率性时延,取决于网络负载率,在交换式以太网中最大数据帧排队时延可认为与数据帧收发最大时延一致,为80μs。
将上述数据代入式(3)计算可知,在DTECS—2系统中,整个网络的最大数据帧传输延迟为984μs。
对于传统DTECS系统中,网络最大数据帧传输延迟亦由式(3)计算得到,其参数取值如下:
m——数据帧需要经过的最大中继模块(REP)数,在CSL1项目中REP共有6个;
Lsf——最大数据帧长度为256位,其传输速率按1.5 Mbit∕s计算,则Lsf约为170.667μs
Lwl——带变压器耦合的电气中距离(EMD)线缆最大长度为200 m,在最恶劣的传输条件下,EMD线缆信号传输速率取1∕2光速,则Lwl约为0.67μs;
Lsw——最大REP转发时延,其取决于REP内部特性,根据经验,Lsw约为3μs;
Lq——取值与Lsf一致,取170.667μs。
将上述数据代入式(3)可知,在DTECS系统中,整个网络的最大数据帧传输延迟约为2.07 ms。
以上数据仅作为理论上的简单计算,重点在于介绍DTECS—2系统的网络延迟规律。由于两种网络对数据报文的处理机制不同,故对于网络延迟要求及延迟处理方法也不相同。实际上DTECS—2系统与DTECS系统在网络时延方面并无可比之处,不能一概而论孰优孰劣。
4 结语
基于ECN标准的网络控制列车具有优异的性能,能够承载更加多样化的数据、更高的传输性能、更低的网络负载率以及更低的成本。本文介绍的DTECS—2系统是一种基于以太网和MVB并存的列车网络控制系统的设计样本。作为创新尝试,DTECS—2系统目前尚未得到实践装车验证,其性能和可靠性在实际应用中会遇到较大问题。但笔者认为,这样的尝试是大势所趋,架设全以太网化列车网络控制系统的需求今后将越来越多。
参考文献
[1] IEC 61375-1:1999 Electric Railway Equipment-Train Bus -Part 1:Train Communication Network[S].
[2] IEC 61375-3-4:2014 Electric Railway Equipment-Train Communication Network -Part 3-4:Ethernet Consist Network[S].
[3] 刘建伟.轨道车辆MVB通信网络的实时特性[J].中国铁道科学,2006,27(6):79.
[4] 陈明可.以太网在城轨车辆上的应用前景[J].铁道机车车辆,2010,30(4):62.
Distributed Train Network Control System-2 Based on Ethernet Network
Zhao Dong,Yang Qike,Ye Biao
AbstractIn the procurement project of Changsha metro Line 1,one train is required to adopt the 2nd generation distributed train network control system based on Ethernet network.In this article,functional requirements,architecture and performance of the system are introduced,which is also compared with the traditional distributed train network control system based on multifunction vehicle bus(MVB).
Key wordsmetro train;distributed train network control system(DTECS);ethernet consist network
中图分类号U 231.6
DOI:10.16037∕j.1007-869x.2016.01.016
收稿日期:(2014-06-05)