高精度轨道摄动模型在GPS导航信号模拟器中的应用
2016-06-01张亮蔡乐马舒洁谭志云
张亮 蔡乐 马舒洁 谭志云
(1北京空间飞行器总体设计部,北京 100094)(2航天恒星科技有限公司,北京 100086)
高精度轨道摄动模型在GPS导航信号模拟器中的应用
张亮1蔡乐2马舒洁1谭志云1
(1北京空间飞行器总体设计部,北京 100094)(2航天恒星科技有限公司,北京 100086)
通过建立高精度的航天器轨道摄动模型,可以显著地提高GPS导航信号模拟器的仿真精度。文章通过借鉴现有的高精度轨道摄动模型的研究成果,将其产生的轨道数据引入到GPS导航信号模拟器的数学仿真流程之中,并对最终的仿真性能进行比对分析。结果表明:在采用所介绍的应用方法后,能够有效地提高GPS导航信号模拟器的工作性能。此研究结果也可为后续GPS导航信号模拟器产品的研制和开发提供参考。
摄动;轨道数据;全球定位系统;导航信号仿真器
1 引言
星载GPS接收机的定位精度直接关系着卫星在轨任务的执行情况,是卫星在轨任务数据事后分析的重要依据。为了在地面测试阶段充分验证GPS接收机的各项性能指标,须要应用GPS导航信号模拟器对GPS接收机的工作情况进行综合评估。导航信号模拟器产生的仿真信号越接近航天器在轨工作中接收到的实际信号,测试结果就更能体现星载接收机的真实定位精度,并且还为星载接收机在轨工作产生的定位数据提供了事后分析的依据。高精度轨道摄动模型的建模和仿真是衡量GPS导航信号模拟器整体性能的一项重要指标。航天器轨道摄动模型的建模须要考虑地球非球形引力、第三体引力、太阳光压力和大气阻力等诸多因素的影响。[1]现有GPS导航信号模拟器应用的是英国SPIRENT公司生产的GSS系列产品,其功能强大,应用面广,但不支持对大气阻力摄动模型的仿真,因此在实际应用过程中具有一定的局限性。
目前GPS导航信号模拟器的首选方案是“信号由硬件产生,软件模拟各个信息模型”的设计结构[2]。在这种设计方案下,模拟器的核心部位——数学仿真软件的工作量极其庞大,既要满足各种仿真模型的计算复杂度和精度要求,还要满足数据输出的实时性要求。在此条件下想要进一步提高数仿软件的轨道计算精度,难度较大。如果能够设计出一个独立于数仿软件之外的仿真模块进行高精度轨道摄动模型的计算,不但可以减少数仿软件的工作量,提高数仿软件的工作效率,还能够显著地提高航天器轨道数据的仿真精度,这对于GPS导航信号模拟器的方案设计具有极其重要的意义。
本文首先介绍了高精度轨道摄动模型的计算机仿真,通过利用现有研究成果,得到了包含地球非球形引力、第三体引力、太阳光压力和大气阻力等摄动效应的航天器轨道仿真数据,并将其轨道数据与STK软件计算结果进行比较;随后以国产导航信号模拟器CSG5000的应用为例,简要介绍了将高精度轨道摄动模型产生的数据文件引入至导航信号模拟器的工作流程;最后,将国产导航信号模拟器CSG5000采用该摄动模型输出数据的仿真结果与国外同类产品进行了比较,并给出了结论。
2 高精度轨道摄动模型的计算机仿真
GPS导航信号模拟器在进行航天器轨道仿真时,须要综合考虑各种摄动因素的影响,并分别对其进行数学建模,这样才能接近卫星在轨的实际运行情况。文献[3]对航天器轨道各种摄动模型的建模方法进行了详细的介绍,并对各种摄动因素的影响程度进行了综合分析。文献[4]则提供了各种摄动模型下摄动力计算方程,最后通过计算机仿真获取到了高精度的轨道仿真数据。其轨道数据的计算精度与STK软件的计算结果基本一致。
轨道摄动模型的计算机仿真主要分为无摄动轨道计算、受摄动轨道计算和轨道漂移误差计算3个部分。无摄动轨道计算部分利用无摄轨道模型,根据航天器的位置和速度初值,采用一定的数值计算方法推算出下一时刻的位置和速度。受摄动轨道计算部分则由航天器的位置和速度初值推算出摄动加速度,再由受摄轨道模型推算出下一时刻的位置和速度。最后,通过轨道漂移误差计算公式求出在摄动力作用下轨道漂移造成的航天器位置误差。循环执行以上的计算过程,则可以计算出航天器在各个时刻的位置偏移量[5]。在进行数值计算时,采用目前广泛使用的Runge-Kutta-Fehlberg方法,既能直接利用各摄动加速度的数学模型,避免计算函数的各阶导数,减少仿真工作的计算量,还能保证轨道数据的计算精度。
按照文献[4]提供的各种摄动模型下摄动力计算方程,通过C++编程实现高精度轨道摄动模型的数学建模,在此条件下进行计算机仿真,便可以获取到航天器轨道的仿真数据。具体操作步骤如下:
(1)在卫星轨道仿真模型中输入经典坐标系下的初始轨道根数值;
(2)按照文献[4]提供的公式分别计算出地球非球形引力、第三体引力、太阳光压力和大气阻力的摄动力数值,并采用高阶Runge-Kutta-Fehlberg方法(RKF78)积分求解卫星运动方程;
(3)设置输出的轨道文件记录数据为地心地固坐标系下的位置、速度、加速度,并设置数据存储周期为20ms,轨道时间长度为12h。
操作完毕后运行仿真程序,最终得到的轨道数据格式如图1所示。
须要说明的是,在全部4种摄动力作用下的仿真数据(即图1中的轨道仿真数据)与STK软件在同等工况下计算得到的轨道数据进行了长时间的比对,其位置误差小于5m,速度误差则在毫米级每秒,证明了该轨道摄动模型设计的合理性。
3 轨道数据在国产导航信号模拟器中的应用
3.1 GPS卫星信号构成
GPS卫星所发射的信号从结构上可分为3个层次:载波信号(主频率L1和次频率L2)、测距码和导航电文。测距码包括C/A码和P码,其中C/A码也叫粗码,精度较差,而P码为精确捕获码,定位精度高。导航电文则是一组数据率为50bit/s的二进制序列,导航电文中包含有GPS导航卫星的状态、星历数据和时间信息等用于导航和定位的信息。
GPS卫星信号的载波、测距码和导航电文都在同一基准时钟(f0=10.23MHz)的驱动下产生,以此来保证GPS信号在时序方面的要求。载波L1和L2的中心标称频率分别为f1=154×f0=1 575.42MHz和f2=120×f0=1 227.6MHz。载波L1上包含C/A码和P码两种测距码,而载波L2上只包含P码[6]。
C/A码是一种Gold码,码长1023,重复周期1ms。C/A码由两个十级的m序列构成(分别为G1序列和G2序列)。将G1序列和经过相移的G2序列进行模2加运算即可得到C/A码。C/A码具有很好的自相关性,不同C/A码之间的互相关性很小。
在L1频段,第i颗GPS卫星在某一时刻t发射信号的数学模型[6-7]为
式中:Ac表示L1频段C/A码的振幅,Ci(t)表示第i颗GPS卫星的C/A码,Di(t)表示第i颗GPS卫星的导航电文,øi表示第i颗GPS卫星的载波相位。
该信号到达接收端的信号数学模型为
式中:Aci为第i颗星发射的GPS信号经过衰减后到达接收端的信号振幅;τdi为第i颗星到达接收端的信号传输时延,包括真实传输时间、卫星钟差、星历误差及多径时延等;fdi为第i颗星相对于接收端运动而产生的多普勒频移;ni(t)为噪声。
3.2 导航信号模拟器内部工作流程
GPS信号从GPS卫星发射到用户接收端所传输的距离与各项误差之和,统称为伪距。作为GPS导航信号模拟器,必须能实时地模拟出航天器在轨飞行的伪距变化关系。对于GPS导航信号模拟器而言,必须获取航天器的运动轨迹才能计算出各个时刻的伪距。因此,将高精度轨道摄动模型生成的轨道文件输入导航信号模拟器的数学仿真软件中进行计算,由数学仿真软件最终生成包含导航星座、空间环境效应等误差项的观测数据和导航电文。其中观测数据是指各路导航卫星到达用户接收端的伪距值和载波相位,即式(2)中的τdi和fdi[8-9]。
控制单元根据接收到的导航电文和观测数据等信息,完成测距码相位和载波相位的合成,并对C/A码和导航电文进行扩频调制和BPSK调制,生成数字中频GPS信号。随后再对数字中频信号进行数模转换,转换为模拟信号后输出至射频模块。
射频模块实现中频信号上变频至L1/L2频点的射频调制,此外还对输出信号进行滤波及功率衰减等处理,最后得到的信号就是模拟在高动态环境下运行的GPS导航信号。
国产导航信号模拟器CSG5000的内部结构如图2所示。
4 应用结果分析
为了对国产导航仿真器CSG5000引入轨道摄动模型后的工作性能进行验证,将其与GSS8000在同等工况下生成的定位数据进行比较。由于GSS8000不支持对大气摄动模型的仿真,因此关闭轨道摄动模型中的大气摄动模型仿真模块。试验验证方案如图3所示。

图3 测试验证方案示意图Fig.3 Schematic diagram of test and verification
首先,将CSG5000引入高精度轨道摄动模型后生成的导航信号输入GPS高动态接收机,并由定位数据分析软件实时接收GPS接收机输出的定位数据包。定位数据包中含有WGS-84坐标系下的三轴位置、速度以及与其对应的UTC时间,各点位之间的时间间隔为1s。本试验选用的是一条12h时间长度的运行轨道,定位数据分析软件将接收到的定位数据包进行本地存储,标记为定位文件1。文件1中记录的点位数据在时刻i的瞬时坐标记为(x1i,y1i,z1i),瞬时速度记为(vx1i,vy1i,vz1i)。
须要说明的是,本文只针对轨道摄动模型的建模精度进行比对,因此GPS仿真环境中的其他误差项,诸如电离层误差、钟差、多径效应等皆忽略不计。轨道摄动模型仿真参数的设置情况见表1。
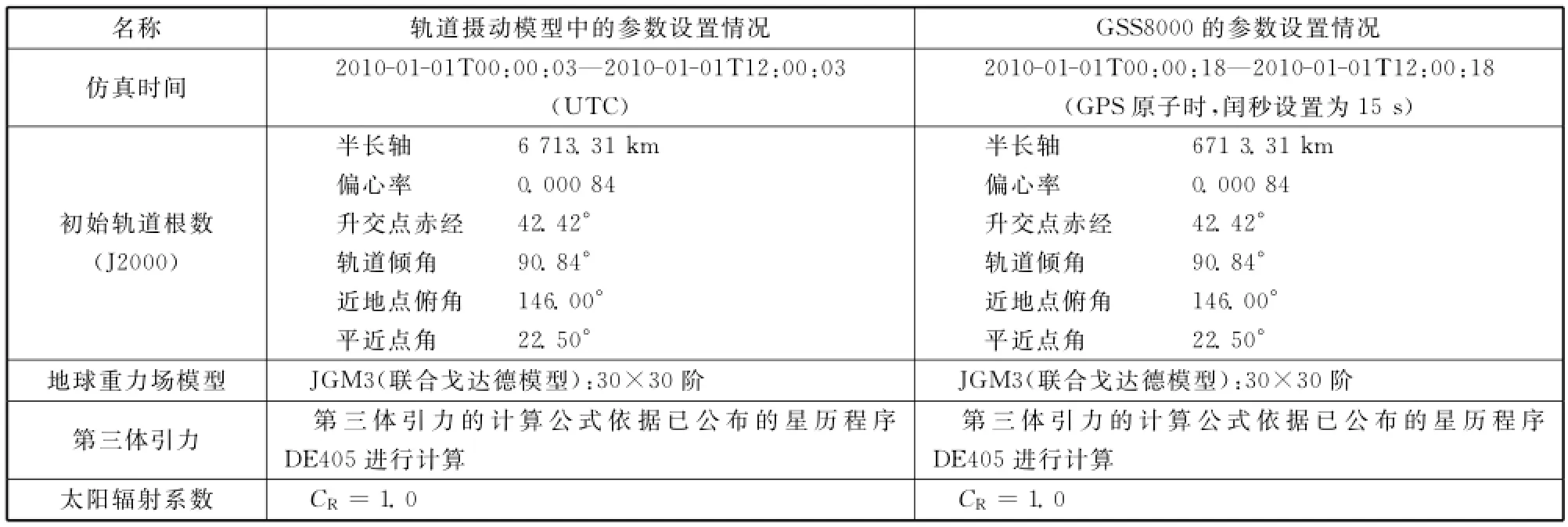
表1 轨道摄动参数设置情况说明Table 1 Experimental condition of perturbation parameters configuration
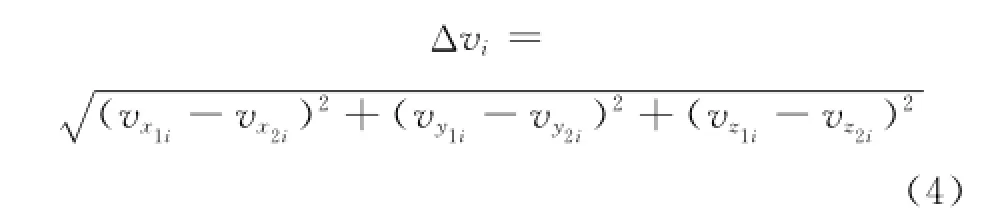
最后,对两种工作模式下生成的定位文件进行比对分析,即将定位文件1与定位文件2在各个时刻记录的点位信息进行比较,对各个时刻的位置误差和速度误差进行统计。其中,定义瞬时位置误差为
定义瞬时速度误差Δvi为
两种试验方案轨道数据的比对结果如图4、图5所示。
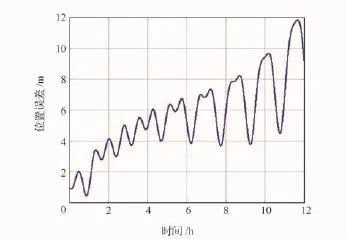
图4 位置误差比对结果Fig.4 Illustration of position data comparison
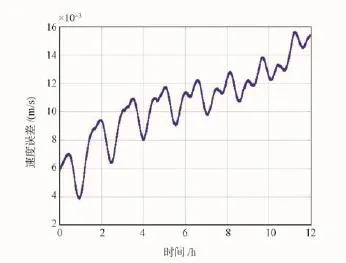
图5 速度误差比对结果Fig.5 Illustration of velocity data comparison
从图4、图5可知,在相同的轨道摄动模型配置情况下,采用本文所介绍的方法,取得了与国外顶尖产品相近的工作性能。在不考虑两套仿真系统由于坐标转换(由J2000坐标系转换到WGS-84坐标系)而产生的固定误差的情况下,在连续12h的仿真时间内,两者定位数据误差在15m以内,而速度误差则为厘米每秒量级。考虑到航天器轨道高度为百千米的量级,航天器相对地心的速度为千米每秒的量级,这种误差对航天器轨道数据仿真的影响几乎可以忽略不计。
由于本文所介绍的轨道摄动模型还具备对大气阻力的计算和仿真能力,因此本文对开启大气摄动模型后的轨道仿真数据也进行了初步探究(开启大气摄动模型后的参数设置详见表2)。具体工作流程为:在同等的试验工况下开启轨道摄动模型中的“NRLMSISE-00”大气摄动模型,按照图4示意的方法生成定位文件3,并将定位文件3的数据与定位文件1的数据进行比较,比对结果见图6、图7。
若在平时,欧阳锋肯定欣然前往,但这一天是他妻子吕凌子的生日,妻子的生日一年只有一次,情况有些特殊,所以钱多多的这个电话让他左右为难。
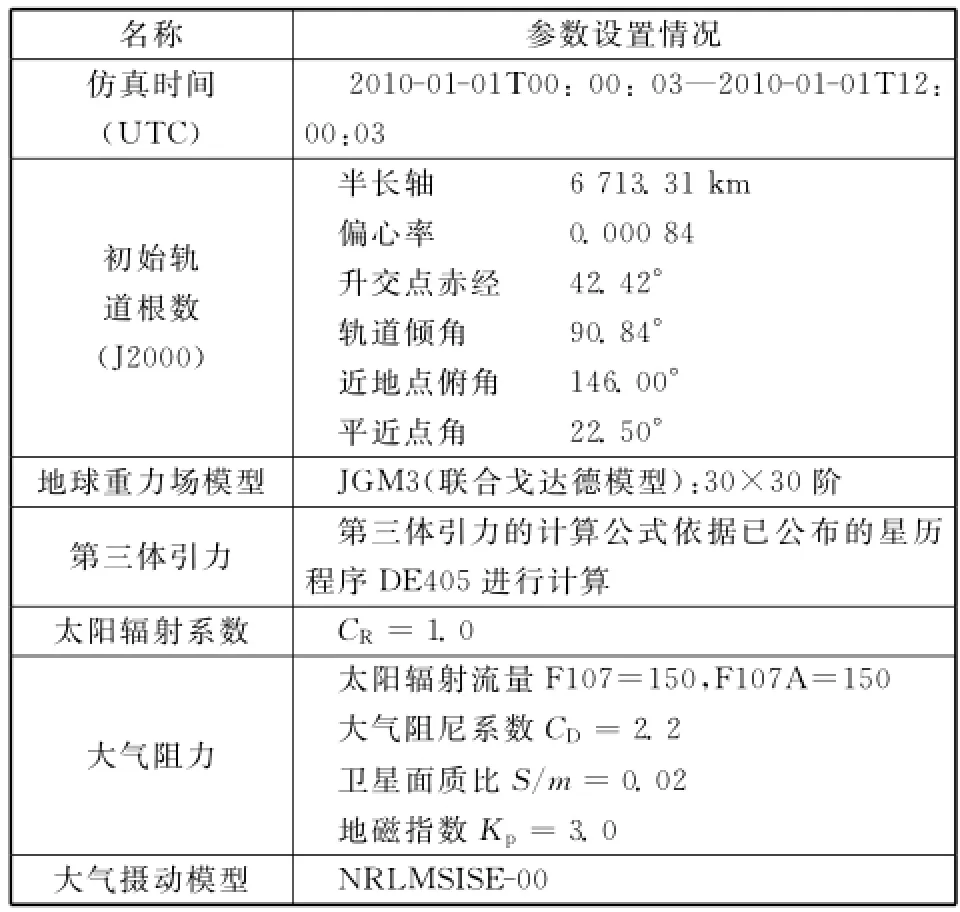
表2 轨道摄动参数设置情况说明(包含大气摄动模型)Table 2 Experimental condition of perturbation parameters configuration(including atmospheric perturbation model)
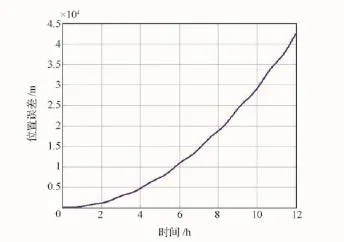
图6 位置误差比对结果Fig.6 Illustration of position data comparison
从图6、图7可知,大气阻力对低轨航天器运行轨道的影响比较明显。对于轨道高度400km左右的航天器,在考虑大气阻力的摄动效应后,其轨道位置和飞行速度的偏差随着时间的推移越来越大。在持续飞行12h以后,轨道位置的偏差能达到几十千米,而大气阻力对航天器飞行速度的影响也达到了接近50m/s的量级,通过以上数据说明大气摄动模型的精确建模对于航天器动力学环境的仿真研究有着非常重要的意义。
5 结束语
为了优化国产导航信号模拟器的信号仿真性能,本文提出了一种对高精度轨道摄动模型进行独立编程的GPS导航信号模拟器设计方案,并对其具体实现方式进行了初步探索。通过分析试验数据发现,将高精度轨道摄动模型产生的轨道数据引入到国产导航信号模拟器的仿真流程中,在连续12h的仿真时间内,两者定位数据的误差在15m以内。证明了国产导航信号模拟器在使用本文介绍的方法以后,轨道动力学仿真性能接近国外同类产品,并且还具备了大气阻力摄动模型的仿真计算能力。采用这种设计方案能够显著地改善国产模拟器的动力学仿真性能,同时也可为后续导航信号模拟器的设计和研发提供一定的参考。
(
)
[1]白绍竣.航天器轨道动力学仿真技术研究[D].哈尔滨:哈尔滨工业大学,2005 Bai Shaojun.Research on the simulation of spacecraft orbit dynamics[D].Harbin:Harbin Institute of Tech-nology,2005(in Chinese)
[2]贾科军,柯熙政.高动态GPS卫星信号模拟器设计与实现[J],宇航计测技术,2006(5):1-6 Jia Kejun,Ke Xizheng.Design and implementation of highly dynamic GPS satellite signal simulator[J].Journal of Astronautic Metrology and Measurement,2006(5):1-6(in Chinese)
[3]袁幸伟.摄动因素对航天器轨道设计的影响分析[D].哈尔滨:哈尔滨工业大学,2010 Yuan Xingwei.Influence analysis of perturbation factors on spacecraft orbit design[D].Harbin:Harbin Institute of Technology,2010(in Chinese)
[4]蒋方华,李俊峰,宝音贺西.高精度卫星轨道摄动模型[C]//全国第十三届空间及运动体控制技术学术会.北京:清华大学航空航天学院,2008 Jiang Fanghua,Li Junfeng,Bao Yinhexi,et al.The model of orbit perturbation with high precision[C]//The 13thNational Conference on Control Technology of Kinematics.Beijing:Aerospace Institute of Tsinghua University,2008(in Chinese)
[5]王融,熊智,乔黎,等.基于受摄轨道模型的小卫星轨道摄动分析研究[J].航天控制,2007(3):66-70 Wang Rong,Xiong Zhi,Qiao Li,et al.Analysis and research of micro satellite orbit perturbation based on the perturbation orbit model[J].Aerospace Control,2007(3):66-70(in Chinese)
[6]杨耀.单通道GPS卫星实时信号模拟源的设计与实现[D].厦门:厦门大学,2013 Yang Yao.Design and implementation for real-time GPS signal simulator with single channel[D].Xiamen:Xiamen University,2013(in Chinese)
[7]牛丰.GPS中频信号的软件仿真[D].天津:天津大学,2008 Niu Feng.The simulation of GPS intermediate frequency signals by software[D].Tianjin:Tianjin University,2008(in Chinese)
[8]张守玉,姜振东.基于STK的卫星轨道机动模型设计与仿真[J].计算机仿真,2004,21(10):25-28 Zhang Shouyu,Jiang Zhendong.Design and simulation of satellite orbital maneuver model based on STK[J].Computer Simulation,2004,21(10):25-28(in Chinese)
[9]刘俊,张思东,张宏科.GPS系统建模与仿真技术研究[J].系统仿真学报,2001,13(3):329-330 Liu Jun,Zhang Sidong,Zhang Hongke.Modeling and simulation in GPS[J].Journal of System Simulation,2001,13(2):329-330(in Chinese)
(编辑:李多)
Application of High-precision Orbit Perturbation Model in GPS Navigation Simulator
ZHANG Liang1CAI Le2MA Shujie1TAN Zhiyun1
(1Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
(2Space Star Technology Co.,Ltd.,Beijing 100086,China)
By building aperturbation model of spacecraft orbit with high precision,we can improve the simulation precision of GPS navigation simulator remarkably.By using existing research achievements,this paper applies the simulated data based on the highly precise model of spacecraft orbit to the procedure of system simulation for GPS navigation simulator,and analyses the simulation result.The result shows that the working performance of GPS navigation simulator is improved distinctly by the method introduced in this paper.This paper may provide a reference for the design and manufacture of simulator in the future.
perturbation;orbital data;GPS;navigation simulator
V416.8
A
10.3969/j.issn.1673-8748.2016.02.011
2015-09-07;
2015-12-21
国家重大航天工程
张亮,男,硕士,工程师,从事遥感卫星综合测试工作。Email:health_zl@hotmail.com。