并联混合动力汽车综合协调控制技术研究*
2016-05-31允侯丽华张黎黎梁春辉
张 允侯丽华张黎黎梁春辉
(1.长春工程学院,长春130012;2.吉林大学汽车仿真与控制国家重点实验室,长春130021)
并联混合动力汽车综合协调控制技术研究*
张允1,2侯丽华1张黎黎2梁春辉1
(1.长春工程学院,长春130012;2.吉林大学汽车仿真与控制国家重点实验室,长春130021)
【摘要】针对并联混合动力汽车(PHEV)工作状态切换过程中面临的多目标综合协调控制问题,从多角度对其多目标综合协调控制技术进行了研究,构建了HEV多目标综合协调控制系统整车控制模型,提出了HEV整车控制器硬件电路总体设计方案,并搭建了HEV多目标综合协调控制系统硬件在环仿真试验平台。基于所设计的硬件在环仿真试验平台和试验台架,分别针对应用多目标综合协调控制技术前、后的整车动力性、经济性、SOC平衡性及排放特性进行了对比分析,验证了并联混合动力汽车多目标综合协调控制技术的有效性。
1 前言
因并联混合动力汽车(PHEV)的动力耦合系统具有部件繁多且呈强非线性的特征,在汽车状态切换过程中,动力耦合系统各部件的高效工作区和工作特性与控制需求差异较大,所以即便各单一部件达到最优工作状态也未必会使得整体系统处于最优状态。且对于各单一部件而言,其各子控制目标之间亦可能相互补充、相互独立甚至可能是相互冲突的,故如何根据整车实时运行工况,对各控制目标进行综合协调控制,以期在满足车辆动力性需求的前提下,使SOC在规定范围内变化,达到油耗最低、排放最少,已成为国内外众多学者研究的热点。
2 混合动力汽车多目标优化问题数学模型
实现对混合动力汽车状态切换过程中车辆动力性、燃油经济性、电池SOC平衡性及排放性能的多目标综合协调控制,实质上是在给定约束条件下,针对多种竞争性目标进行折衷,求各子目标函数相对最优解的过程[1-4]。
多目标函数方程为:
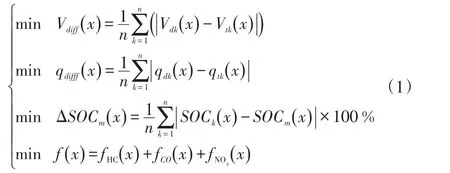
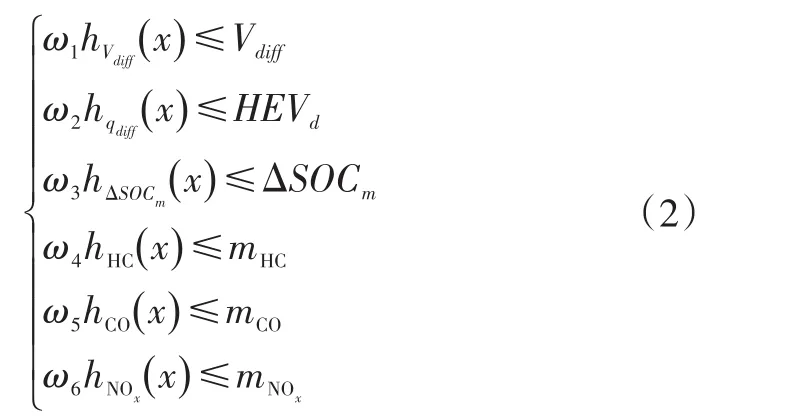
约束条件为:式中,Vdk(x)为各采样点处需求车速函数;Vtk(x)为各采样点处实际车速函数;n为采样点数;Vdiff(x)为车速差均值目标值函数,本文中Vdiff<0.2表明车辆动力性较好;qdk(x)为期望燃油消耗函数;Vdifff(x)为燃油消耗差均值函数;SOCk(x)为采样点处SOC实际值函数;SOCm(x)为SOC平衡值函数;ΔSOCm(x)为SOC实际值与平衡值之差均值的目标值函数和
fNOx(x)为行驶过程中尾气排放函数为反映各目标参数重要程度的权值,需根据实际工况实时调整;h(·)(x)为与各子目标对应的约束函数;为所考虑模型的n个与车速、加速度、功率相关的决策变量;HEVd为燃油消耗目标值;ΔSOCm为SOC实际值与平衡值之差的均值的目标值,ΔSOCm越小,说明SOC波动越小,平衡性越好;mHC、mCO、mNOx为行驶过程中尾气排放目标值。
3 混合动力汽车多目标综合协调控制策略
3.1HEV多目标综合协调控制算法
为解决混合动力汽车状态切换过程中面临的动态协调控制问题,需制定多目标综合协调控制策略。首先根据采集到的电动机、发电机、电池等运行数据判断混合动力汽车是否满足状态切换的条件,如果不满足条件,则直接根据当前混合动力汽车运行状态确定发动机和电动机的目标转矩;如果满足条件,则向动态协调控制算法发出状态切换请求,进入状态切换子程序。由于并不是所有的状态切换过程都需要进行协调控制,因此需进一步判断进行状态切换的系统是否满足协调控制的条件,若满足条件,则进入多目标综合协调控制子程序。因多目标综合协调控制算法的控制目标是在满足车辆动力性需求的前提下,故首先对各目标进行综合分析,然后在此基础上建立多目标优化问题数学模型,并确定对优化目标产生影响的各因素的指标权重,根据权重求出优化模型中各目标函数的相对最优解,获得优化结果。动态协调控制算法流程及多目标综合协调控制子程序流程分别如图1和图2所示。
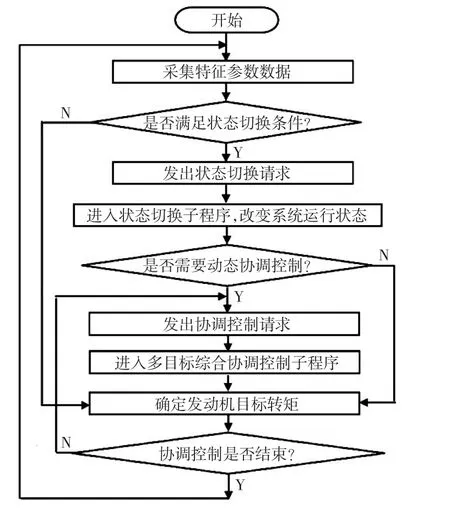
图1 动态协调控制算法流程
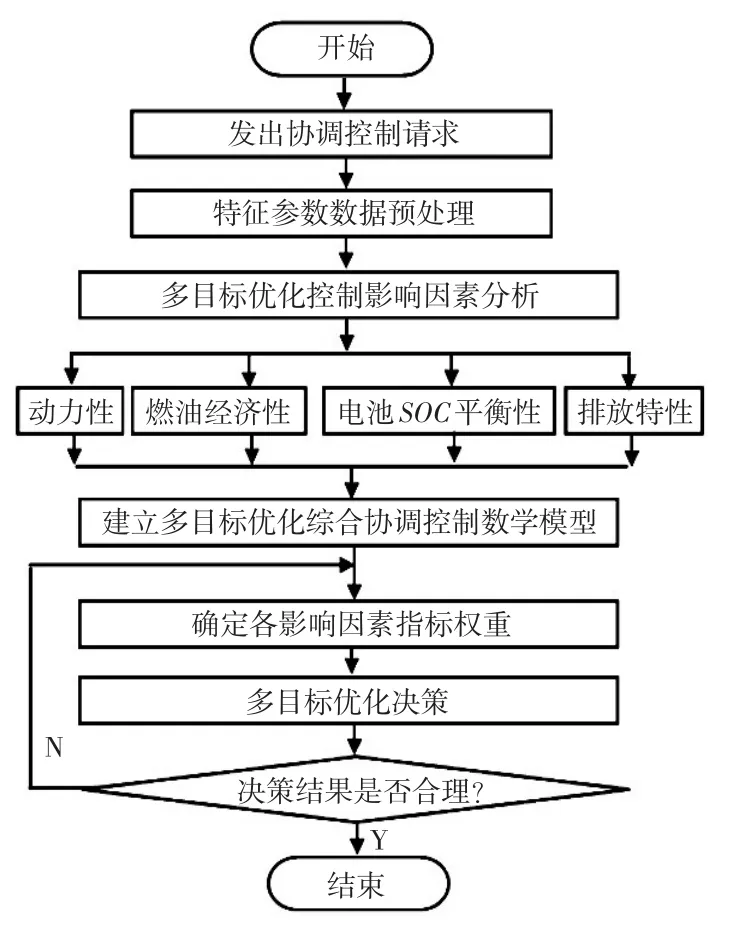
图2 多目标综合协调控制子程序流程
3.2HEV多目标综合协调控制系统整车控制模型
结合HEV多目标综合协调控制策略建立混合动力汽车多目标综合协调控制系统整车控制模型,模型结构如图3所示。
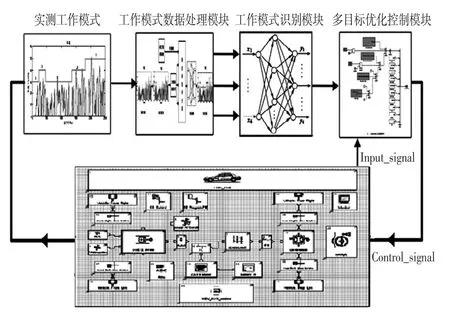
图3 HEV多目标综合协调控制系统整车控制模型
图3中,工作模式数据处理模块的功能是针对实测工作模式设定采样时间段,计算该采样时间段内工作模式的特征参数,然后对特征参数数据进行预处理(如异常点去除、去毛刺等),最终将处理后的特征参数数据输出给工作模式识别模块。工作模式识别模块的功能是以采样时间段为区间对特征参数数据进行连续预测识别,进而实时判断有无工作模式切换发生,并预测识别出系统所切换到的工作模式。多目标优化控制模块的功能是判断状态切换过程是否需要动态协调控制,若需要协调控制,则结合多目标综合协调控制算法计算发动机油门开度、电机输出转矩等控制信号并传送给整车动力学模型,以完成车辆的动态仿真。
4 基于dSPACE的多目标综合协调控制硬件在环仿真试验
4.1HEV整车控制器硬件电路总体设计方案
整车控制器(HCU)性能的好坏将直接决定HEV能否达到理想的控制目标,其主要功能是采集驾驶员的相关操作信息,通过CAN总线获得整车行驶状态信息以及电机、电池等其它电控系统的相关数据,在此基础上结合控制策略对采集数据进行分析、运算和处理,将相应结果以控制命令或数据形式通过CAN总线发送给各外部子ECU(电机控制器、发动机控制器和电池控制器等)。各电控系统的微控制器单元根据所接收到的信息执行相应的操作与处理,进而实现对混合动力汽车的合理控制和对整车动力及能量的有效分配。基于模块化设计思想,设计的硬件电路包括MCU最小系统模块、输入/输出开关信号处理电路、输入/输出模拟信号处理电路、输入/输出脉冲信号处理电路、CAN总线通讯模块及SCI串行口通信模块[5~11]等。整车控制器结构原理框图如图4所示。
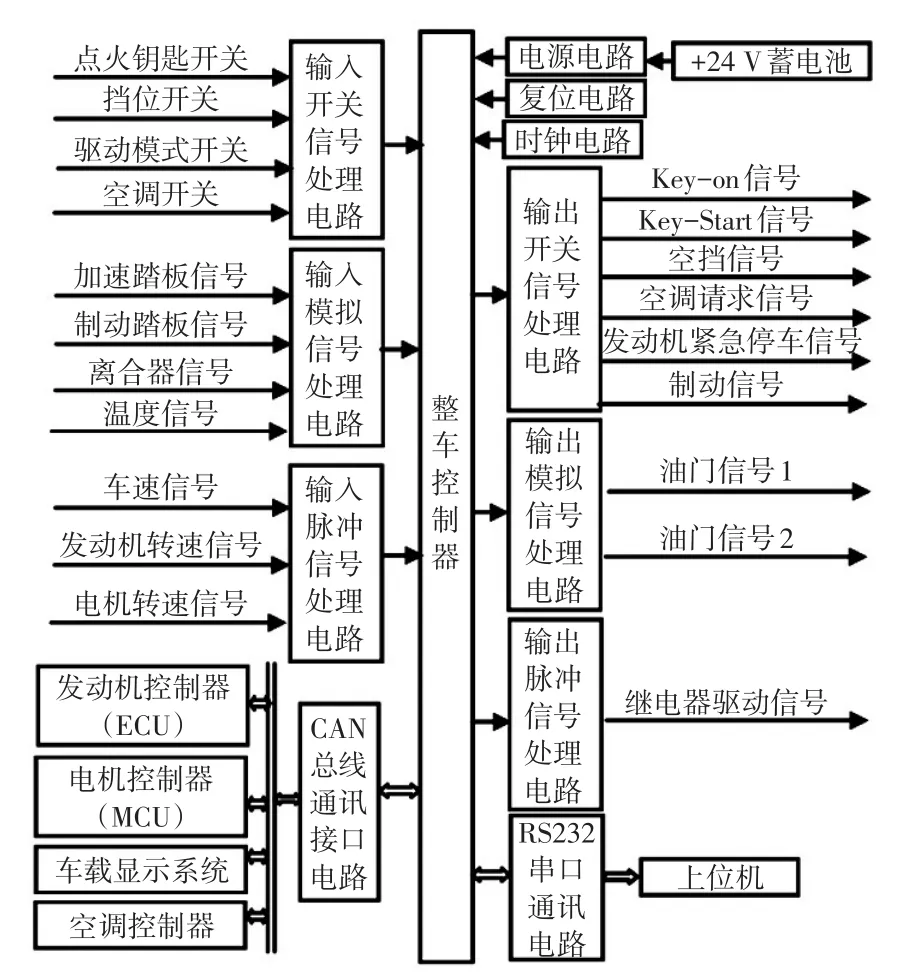
图4 整车控制器结构原理框图
4.2混合动力汽车综合协调控制系统硬件在环仿真平台开发
硬件在环仿真技术是当今汽车电子开发普遍采用的技术手段,该项技术在测试和验证被开发系统的控制策略及运行可靠性的同时,还能有效降低试验成本、缩短试验周期[12]。图5为混合动力汽车综合协调控制系统硬件在环仿真试验平台架构,该平台是由计算机、dSPACE实时仿真系统、驾驶室仿真器、HCU以及其它外围通讯测试设备共同组成的一个闭环开发测试系统[13]。其中,计算机用于实现上位机监控,dSPACE的作用是将从驾驶室仿真器发送来的驾驶员操控信息转换为HCU可以接受的开关信号、模拟信号与脉冲信号,同时对HCU发出的信号进行采样,并接收由HCU发送的CAN总线通信信号,以实现该硬件在环仿真系统的闭环仿真。
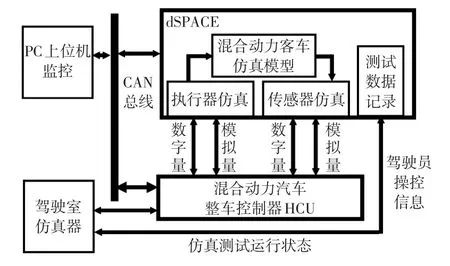
图5 硬件在环仿真试验平台架构
4.3混合动力汽车综合协调控制硬件在环仿真试验研究
完成了硬件在环仿真试验平台的搭建后,将设计的整车控制模型导入dSPACE中,将控制软件安装在HCU中,进一步对整车控制器的控制功能进行测试,并对应用协调控制策略前、后的整车性能进行比较、验证。
4.3.1协调控制前、后整车动力性试验对比
协调控制前、后整车动力性试验结果对比如图6所示。
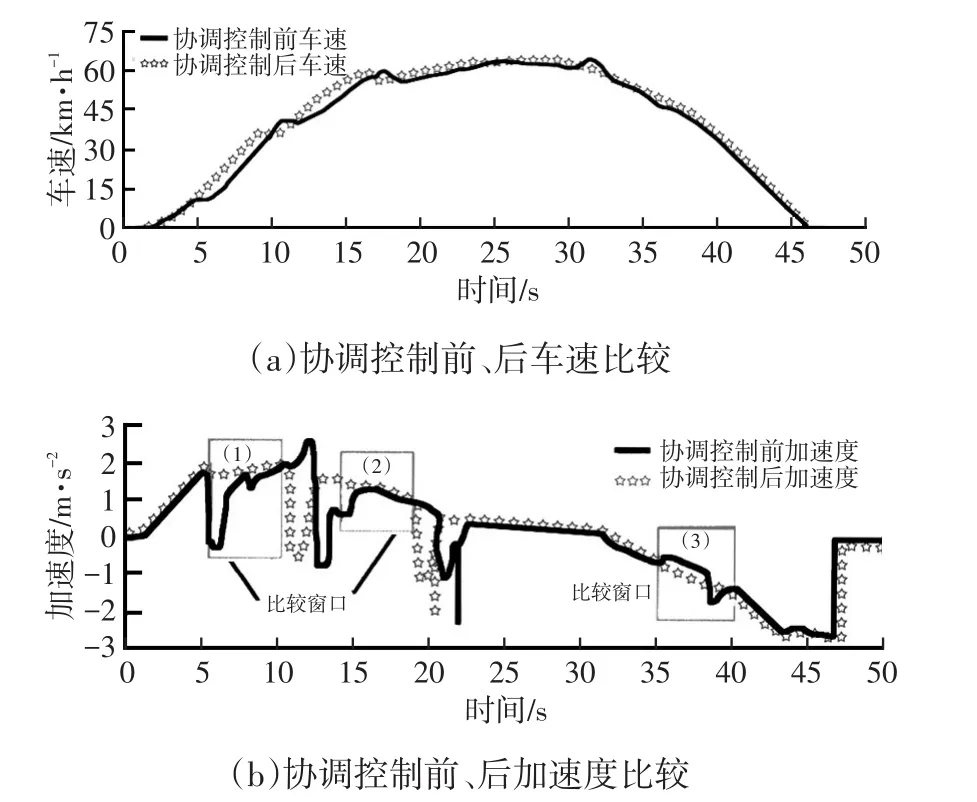
图6 协调控制前、后整车动力性试验结果比较
由图6a可看出,协调控制前车速变化连续性较差,协调控制后车速变化连续性明显改善;由图6b可看出,经协调控制后加速度变化的平滑性明显优于未经协调控制时的变化情况,说明此时驾驶员行车过程中受到的冲击减小,整车动力性及驾驶舒适性均得到提高。
4.3.2协调控制前、后发动机工作点和电机工作点对比图7和图8分别为协调控制前、后发动机工作点和电机工作点对比结果。从图7和图8可看出,协调控制后发动机工作点和电机的工作点均有所提高,表明经协调控制后发动机和电机的效率更高,经济性更好。
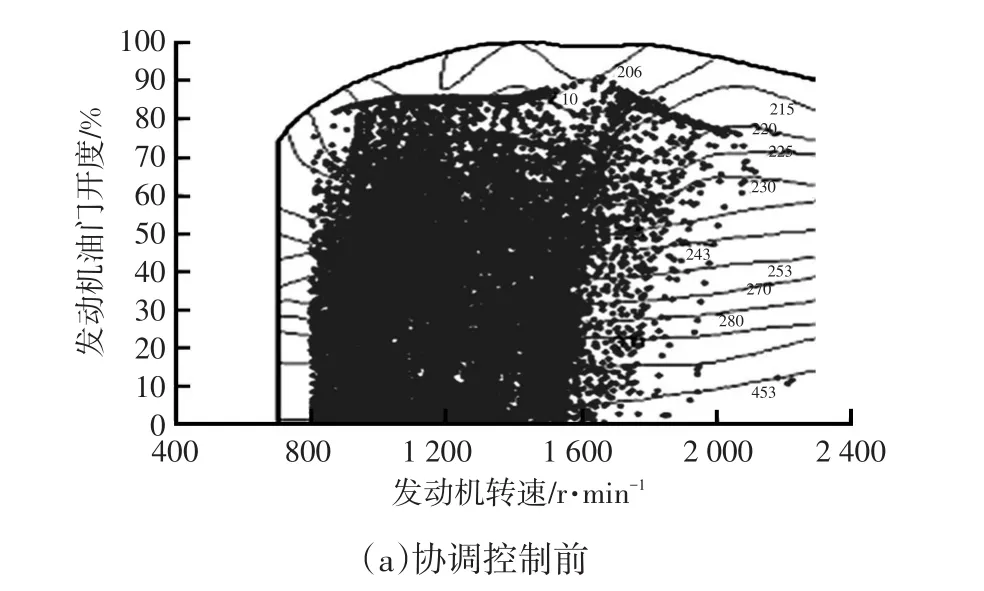
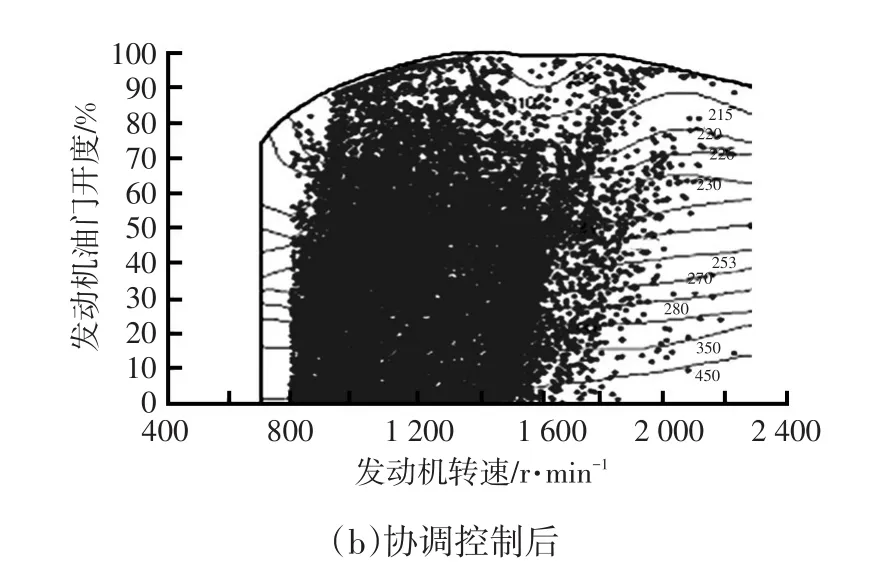
图7 协调控制前、后发动机工作点对比
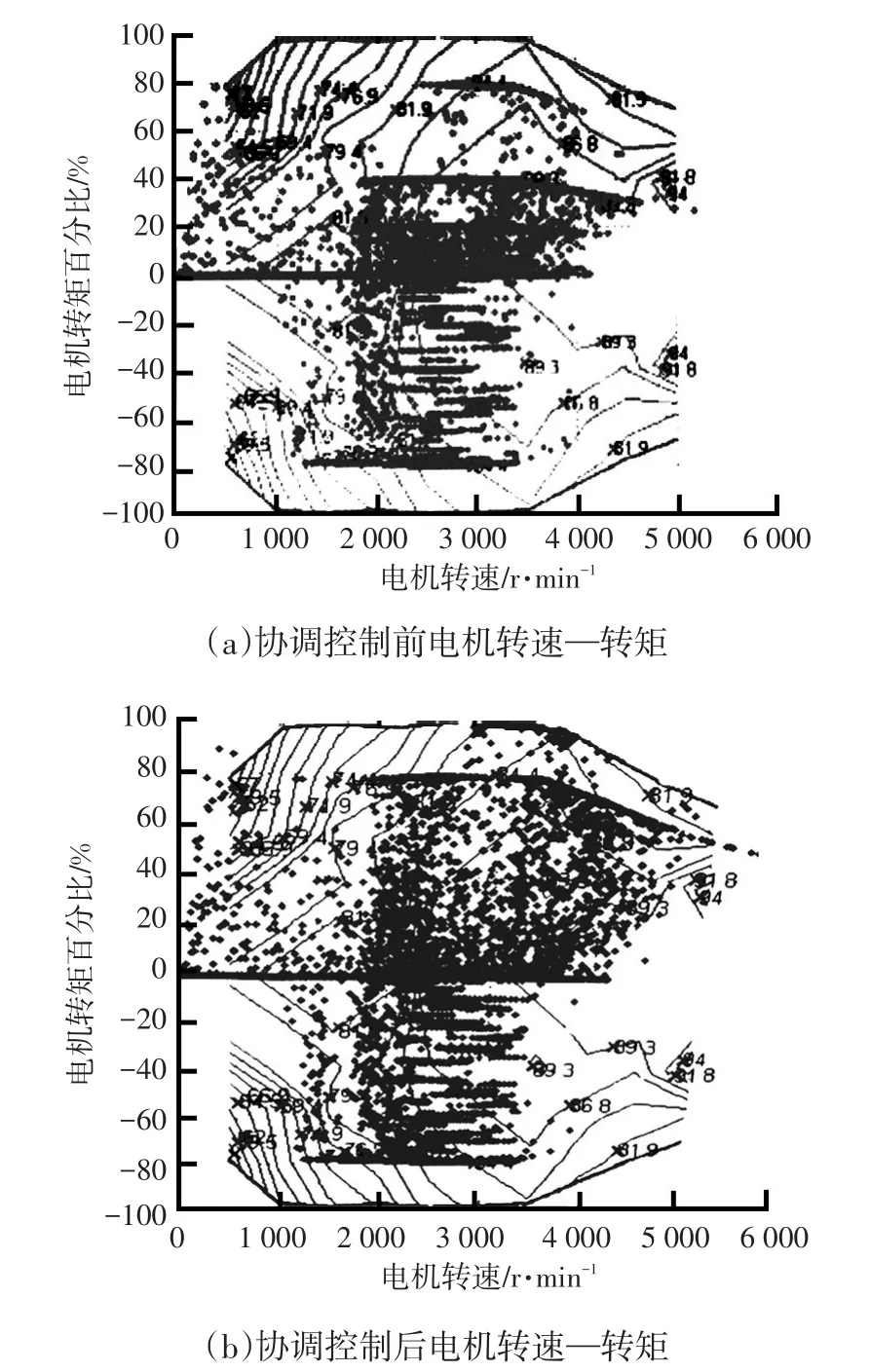
图8 协调控制前、后电机工作点对比
4.3.3协调控制前、后电池SOC变化情况对比
本文采用SOC值与平衡值SOCm之差的均值ΔSOCm作为电池能量平衡性的衡量标准,且定义ΔSOCm的变化范围不超过5%,若ΔSOCm变化超过该范围,说明该工况下车辆SOC的自平衡性不满足要求[14]。图9为协调控制前、后电池SOC变化情况对比结果。从图9可看出,SOC平衡值为0.6,结合试验中各采样点数据可分别计算出协调控制前、后的ΔSOCm,分析计算结果可知,ΔSOCm从协调控制前的6%降至协调控制后的3%,达到允许范围。可见,经协调控制后,电池SOC值被维持在一个合理的范围内,动力电池亦具有较高的充放电效率,有利于延长电池寿命。
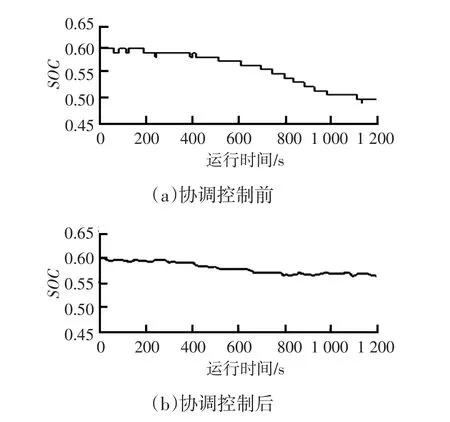
图9 协调控制前、后SOC变化情况对比
5 台架试验结果及分析
为验证与评价在工作状态连续切换过程中多目标综合协调控制策略的有效性,利用台架试验对应用协调控制策略前、后的3种典型循环工况的各项性能指标进行了测试,测试工况分别为美国US06测试循环(工况Ⅰ)、FTP测试循环(工况Ⅱ)和欧洲NEDC测试循环(工况Ⅲ)。试验时选取车速差均值作为整车动力性评价指标,选取百公里油耗作为整车经济性评价指标,选取电池SOC变化均值作为电池SOC平衡性评价指标,选取NOx、CO和HC排放数据作为排放性能评价指标。协调控制前、后各项性能指标的对比结果如表1所列。由表1可知,经协调控制后,整车动力性、经济性、SOC平衡性及排放特性均比优化控制前有所提高,表明了所建立的协调控制策略的有效性。
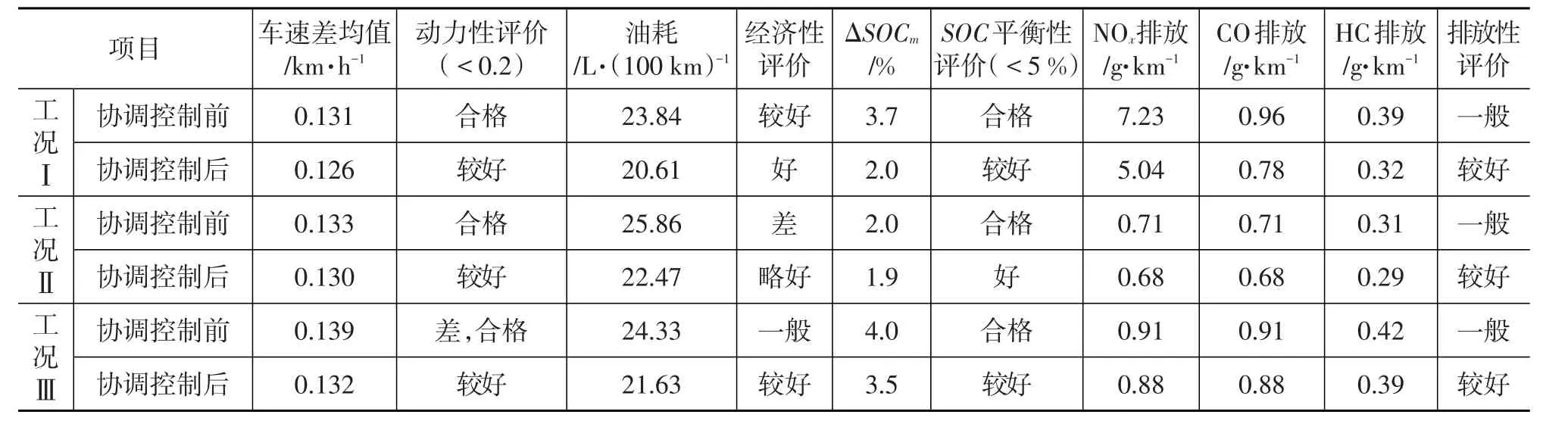
表1 不同工况下多目标综合协调控制台架试验结果
6 结束语
本文针对混合动力汽车状态切换过程中车辆动力性、燃油经济性、电池SOC平衡性及排放性能的多目标综合协调控制问题,从数学模型构建、多目标综合协调控制算法研究、整车控制器硬件电路总体方案设计、硬件在环仿真平台开发等多角度对并联混合动力客车多目标综合协调控制技术进行了全面、系统的研究,并基于所设计的dSPACE硬件在环仿真试验平台及试验台架对所研究的协调控制技术进行了验证。仿真与台架试验结果表明,应用多目标综合协调控制策略后,整车动力性、经济性、SOC平衡性及排放特性均得到了明显改善,证明了该多目标综合协调控制技术的可行性与有效性。
参考文献
1Gu Xianguang, Sun Guangyong, Li Guangyao et al. Multiob⁃jective optimization design for vehicle occupant restraint system under frontal impact.Structural and Multidisci⁃plinary Optimization, 2013,47(3):465~477.
2 Wu Lianghong, Wang Yaonan, Yuan Xiaofang et al.Multiob⁃ jective optimization of HEV fuel economy and emissions us⁃ing the self-adaptive differential evolution algorithm.IEEE Transactions on Vehicular Technology, Xiangtan,2011,60 (6):2458~2470.
3Keller,André A. Fuzzy multiobjective optimization modeling with mathematica. WSEAS Tran-sactions on Systems,2009, 8(3):368~378.
4江道琪,何建坤,陈松华.实用线性规划方法及其支持系统.北京:清华大学出版社,2006.
5张亚明,何洪文,张晓伟.混合动力汽车整车控制器开发.中北大学学报(自然科学版), 2009, 30(6):530~535.
6滕文祥.嵌入式混合动力汽车总成控制系统的设计与研究:[学位论文].山东:山东科技大学,2009.
7孙存娟.并联式HEV多能源动力总成控制系统的研究:[学位论文].哈尔滨:哈尔滨理工大学,2009.
8张翔.纯电动汽车整车控制器进展.汽车电器,2011(2): 1~5.
9周巍.混合动力汽车多能源动力总成控制器的研究与开发:[学位论文].上海:上海交通大学,2007.
10潘凯.基于MPC555的混合动力电动汽车整车控制器硬件系统设计.汽车工程,2005,27(1):20~23.
11杨庆保.纯电动汽车整车控制器研究:[学位论文].北京:北京交通大学,2012.
12 Hsani M,Gao Y,Gay S E,et al.Modern electric,hybrid electric and fuel cell vehicles: fundamentals,theory and de⁃sign. Boca Raton,FL: CRC,2004.
13杨闻睿,敖国强,刘志,等.高压共轨柴油机ECU硬件在
环仿真系统软件设计.内燃机工程,2009,30(5): 41~45. 14白东明.基于工况识别的CNG混合动力公交车控制策略
优化研究:[学位论文].长春:吉林大学,2014.
(责任编辑文楫)
修改稿收到日期为2016年2月26日。
主题词:并联混合动力汽车综合协调控制硬件在环仿真
Research on Comprehensive Coordination Control Technology for Parallel Hybrid Electric Vehicle
Zhang Yun1,2, Hou Lihua1, Bi Mingxuan3, Liang Chunhui1
(1.Changchun Institute of Technology, Changchun 130012; 2. State Key Laboratory of Automobile Simulation & Control, Jilin University, Changchun 130021)
【Abstract】For multi-objective comprehensive coordination control of parallel hybrid electric vehicle(PHEV)during operating state switching, multi-objective comprehensive coordination control technology is studied in many aspects, and a HEV multi-objective comprehensive coordination control system vehicle control model is built, and HEV vehicle controller hardware circuit overall design is proposed. In addition, HEV multi-objective comprehensive coordination control system hardware in the loop simulation platform is constructed. Based on the hardware in the loop simulation platform and the experimental bench, the vehicle power, economy, SOC balance and emission characteristics before and after the application of multi- objective comprehensive coordination control technology are compared and analyzed comparatively, and effectiveness of the multi-objective comprehensive coordination control technology is proved.
Key words:Parallel hybrid electric vehicle, Comprehensive coordination control, Hardware in the Loop Simulation
*基金项目:吉林省科技厅基金(201205046);国家自然科学基金(51276079)。
中图分类号:U469.72;TK401
文献标识码:A
文章编号:1000-3703(2016)04-0036-05