Nachi MZ04机器人在智慧工厂中的运动仿真与轨迹规划
2016-05-30胡丹丹戴花林
胡丹丹 戴花林
摘 要:本文在Matlab环境下,利用机器人运动学原理对Nachi MZ04机器人的参数进行运动分析,并利用Matlab Robotic Toolbox对Nachi MZ04机器人进行三维建模、运动学分析,通过实验证明了其正确性;在智慧工厂应用中进行了轨迹规划,并通过规划运动的动态图、关节曲线图以及机器人末端轨迹得出达到了预期效果的结论。
关键词:Matlab Robotic Toolbox;机器人运动学;Nachi MZ04;智慧工厂
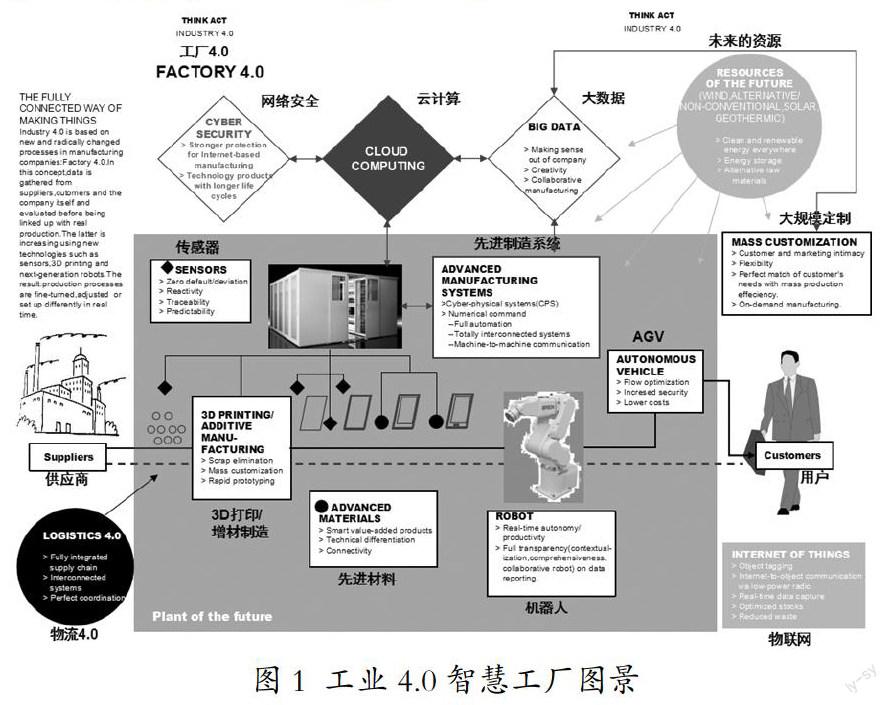
如图1所示为工业4.0智慧工厂图景,智慧工厂指向的是智能联网系统:信息技术(IT)与自动化技术(AT)与传统生产环境相结合,生成一个互联的制造系统网络,它们在本质上是物理的,但又具有联网通讯的功能,目的是通过通讯和智能联网功能使得生产过程更加灵活、高效并具有可持续发展性,从而提高工业竞争力。
从图中可以看出,机器人在智慧工厂中扮演着重要的角色,本文基于Matlab Robotic Toolbox对Nachi MZ04机器人进行运动仿真并在智慧工厂中进行轨迹规划。
1 Nachi MZ04机器人的参数设计
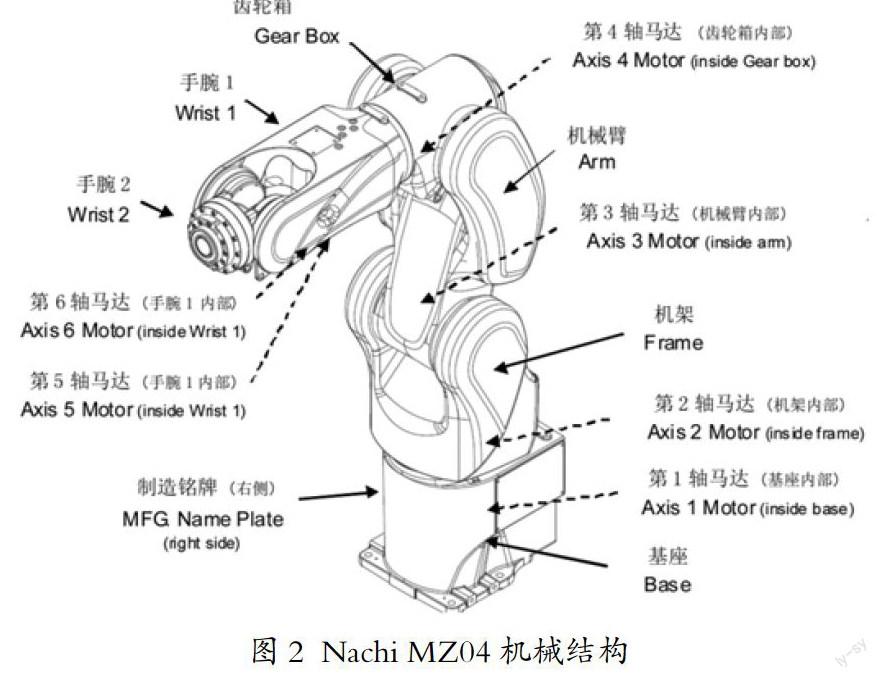
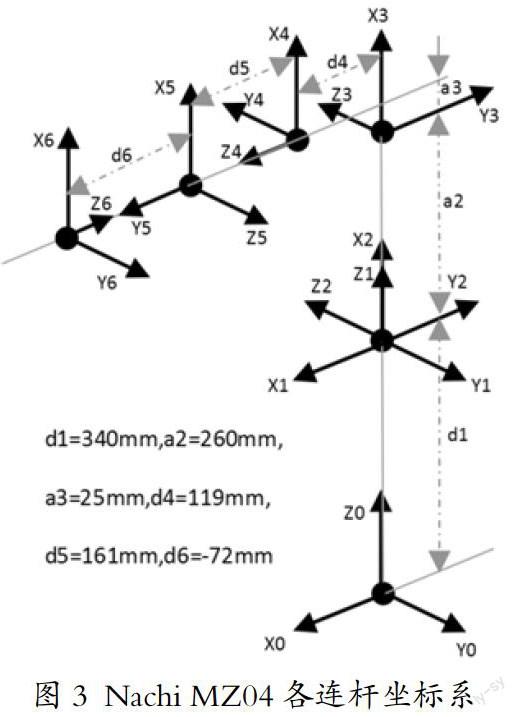
MZ04机器人是由Nachi(那智)公司生产的6自由度串联结构机器人,它由6自由度旋转关节构成,其示意图如图2所示,其中,第1、2、3轴确定手腕参考点位置,第4、5、6轴确定手腕的方位。根据机器人自身参数和Craig参考坐标系建立约定建立各连杆坐标系如图3所示。
当Nachi MZ04机器人处于初始状态时,相应的连杆参数表如表1所示。其中a2=260mm,a3=25mm,d1=340mm,d4=119mm,d5=161mm,d6=-72mm。参数说明:
杆件长度ai-1为从zi-1到zi沿xi-1测量的距离;
扭转角?琢i-1为从zi-1到zi沿xi-1旋转的角度;
横距di为从xi-1到xi沿zi测量的距离;
关节角?兹i为从xi-1到xi沿zi旋转的角度。
2 Nachi MZ04机器人运动分析
机器人学中关于运动学和动力学最常用的描述方法是矩阵法,这种数学描述是以四阶方阵变换三维空间的齐次坐标为基础的,矩阵法、齐次变换等概念是机器人学研究中最重要的数学基础,利用Matlab Robotic Toolbox中的transl、rotx、roty和rotz函数可以非常容易地实现用齐次变换矩阵表示平移变换和旋转变换。例如机器人绕x轴平移了300mm的齐次变换可表示为:T=transl(0.3,0,0);绕z轴旋转了90°可以表示为T=rotz(pi/2);绕y轴旋转90°,接着绕x轴旋转-90°,再沿z轴方向平移500mm对应的齐次变换可表示为:T=transl(0,0,0.5)*rotx(-pi/2)*roty(pi/2)。Nachi MZ04机器人中六个关节均为旋转关节。
3 MATLAB运动仿真
机器人是由多个连杆连接而成的,机器人关节分为旋转关节和移动关节。创建机器人的两个最重要的函数是:Link和SerialLink。根据图3和表1中的参数,可构建Nachi MZ04机器人仿真matlab程序并将仿真机器人(初始状态)绘制如图4所示。
图5为MATLAB中机器人控制面板,图中,q1、q2、q3、q4、q5、q6分别为关节1至关节6的关节角,对应表1中的?兹1至?兹6,可通过调节图中的滑块来使关节转动,就像实际操作机器人一样,通过机器人自带示教仪实际操作机器人各关节与在Matlab中仿真控制各关节进行对比,所得结果一致,从而验证了仿真建模的正确性。
4 智慧工厂中Nachi MZ04机器人的运动轨迹规划
在实际模拟智慧工厂中,Nachi MZ04机器人用于抓取工件,通过机器人自带示教仪测量出起始点关节空间矢量qA(0,0,0,0,0,0)与目标点关节空间矢量qB(1.6,1.-2,0,0,0)的坐标,利用Matlab Robotic Toolbox中的关节空间规划算法jtraj可以计算出需要的轨迹,并可在matlab中看到运动动态图以判断是否可行,图6为Nachi MZ04机器人关节3的角位移、角速度、角加速度曲线,图7为Nachi MZ04机器人末端运动轨迹。
5 结语
本文简单介绍了智慧工厂,利用Matlab Robotic Toolbox对Nachi MZ04机器人建立了三维模型,分析了Nachi MZ04机器人的运动问题和轨迹规划问题,通过示教仪操控机器人与Matlab仿真控制机器人各关节结果对比验证了模型建立与运动分析的正确性,在Matlab中进行轨迹规划时可以看到机器人运动的动态图,各关节没有运动错位的情况出现,由图6可以看见关节能平稳地由初始点运动至目标点,图7可以看到机器人末端运动轨迹,达到了运动轨迹规划的目的。
参考文献:
[1] 蔡自兴,谢斌.机器人学[M].第三版.北京:清华大学出版社,2015.
[2] 刘保住,苏彦华,张宏林.MATLAB 7.0 从入门到精通[M].北京:人民邮电出版社,2015年2月第13次印刷.
[3] 罗家佳,胡国清.基于MATLAB的机器人运动仿真研究.厦门大学学报,2005年9月第44卷第5期:640-644.
作者简介:
胡丹丹(1987-),女,汉族,江西南昌人,硕士研究生,高职讲师,研究方向:机电一体化;
戴花林(1968-),女,汉族,湖南株洲人,本科,高职副教授,研究方向:电气自动化。