一种高分辨率遥感影像道路提取方法
2016-05-30赵焕新
赵焕新
摘要:总结了道路提取常用的形状指数,提出一种新的长宽比指数,采用该长宽比和面积指数结合光谱特征从高分辨率遥感影像中提取道路。实验证明采用新的长宽比指数能有效的将线状道路与面状房屋区分开来。
关键字:高分辨率;遥感影像;道路提取
中图分类号:G642.4 文献标志码:A 文章编号:1674-9324(2016)17-0199-02
近年来,很多学者致力于利用道路的形状特征和光谱特征相结合来提取道路。不同学者提出不同的形状特征,总结如下:
紧实度:P为区域周长,Π为圆周率。
长宽比:区域的最小外接矩形的长宽比。
矩形度:也有学者称之为充满度。F=S为区域面积,为最小外接矩形面积。
形状复杂性E:E=L为连通区域周长,S为区域面积。
周长:影像对象边界的总长为像素长度。
面积:道路通常是一段一段相互连接的网状结构,面积不会太小,利用此特征可滤除面积较小的干扰物体,节省后续计算时间。
形状指数:C是区域周长,A为区域面积。
密度:其中协方差矩阵S。
不对称性:m、n分别表示外接椭圆长轴和短轴的长度。
狭长度:其中与表示的最大值和最小值。f(I,j),θ∈0,Π)其中N和M分别是图像的行列号上限。
极惯性矩:平面面积对垂直于该平面的轴线之惯性矩称为极惯性矩。
一、传统的长宽比指数存在不足
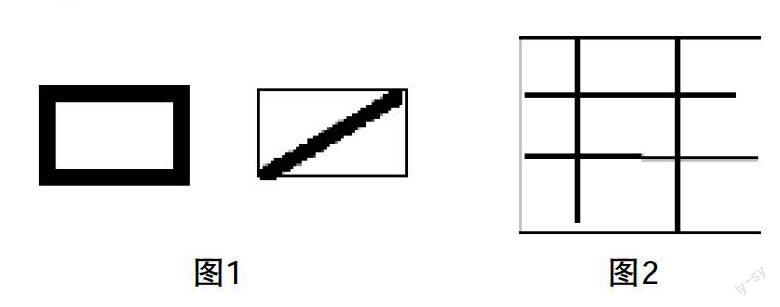
在图1中左边矩形的区域与右边线型道路拥有同样大小的外接矩形,利用上述长宽比无法区分两者。苗则朗等对长宽比进行了改进,改进后的长度为图形外接矩形的对角线L,宽度W为n/L,其中n为图形像素个数。后者相对前者是有所改进,但有些情况仍然存在不足,如遇到错综复杂的道路,如图2中,其外接矩形的对角线长度远小于道路真实长度,如此造成计算得到的长宽比偏小。
二、改进长宽比指数并结合面积参数从高分辨率遥感影像中提取道路
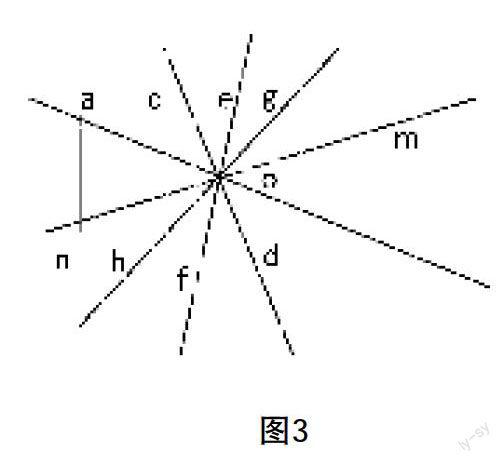
如图3所示,在一连通区域内选择一像素点o,作若干条经过o点的直线,这些直线要均匀的分布在不同方向上,直线与连通区域的交线分别为ab、cd、ef、gh、mn……比较各线段的长度,取最短的线段长度作为该连通区域的宽度W,该联通区域的长度L=S/W,其中S代表该区域的面积。在该过程中,所作直线条数越多,所求的宽度越接近于区域宽度,但同时会增大计算量,减慢计算速度,此外每条直线可能会遇到区域中有孔洞的地方,导致计算的宽度偏小。考虑到以上两个因素,本次实验中对每个连通区域选择通过四个不同的像素点分别作若干条直线,本文中所作直线分别为东西、南北、西北-东南、东北-西南方向的四条直线,首先计算通过每个点的四条直线与联通区域的交线,取其中的最短距离d1,d2,d3,d4,然后取d1,d2,d3,d4中的最大值作为该区域的宽度。
(一)提取道路的流程
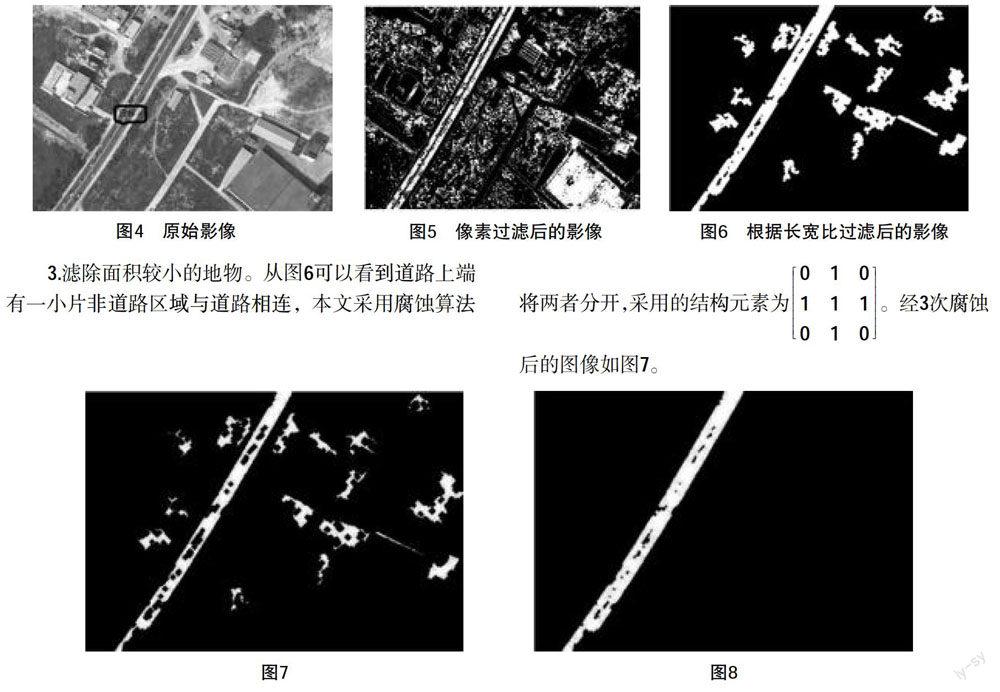
1.统计图像道路像素RGB值,初步选择道路。本文在道路上均匀选取40个像素点,统计他们的RGB值范围为932.从图5中可以看到每个连通区域有很多小孔,为减少对获取连通区域宽度的影响,对图2进行先膨胀后腐蚀的操作,减少孔洞的数量,然后根据前述的长宽比定义获取每个连通区域的长宽比,消除长宽比小于阈值的连通区域,此次实验所取阈值为10。得到图6,从图中可以看到大部分零星地物已被消除,右下角矩形建筑也被消除。
3.滤除面积较小的地物。从图6可以看到道路上端有一小片非道路区域与道路相连,本文采用腐蚀算法将两者分开,采用的结构元素为0 1 01 1 10 1 0。经3次腐蚀后的图像如图7。
由于腐蚀的作用使得道路变窄,中间的孔洞也变大,因此滤除小面积地物后再采用矩阵B对图像进行3次膨胀处理,最终得到的主干道路图像如图8。
(二)结论与不足
结论:本文提出一种新的长宽比的定义,并利用该定义结合面积参数成功从高分辨率遥感影像提取主干道路。
不足:连通区域里的孔洞会影响长宽比的获取。
参考文献:
[1]罗庆洲,尹球,匡定波.光谱与形状特征相结合的道路提取方法研究[J].遥感技术与应用,2007,22(2):339-344.
[2]李晓峰,张树清,韩富伟.基于多重信息融合的高分辨率遥感影像道路信息提取[J].测绘学报,2008,37(2):178-184.
[3]雷小奇,王卫星,赖均.一种基于形状特征进行高分辨率遥感影像道路提取方法[J].测绘学报,2009,38(5):457-465.
[4]申真.基于面向对象的高分辨率遥感影像道路提取研究[D].赣州:江西理工大学,2012.
[5]苗则朗,史文中,张华.一种高分辨率影像道路中心线提取算法[J].中国矿业大学学报,2013,42(5):887.
