《自动控制原理》的虚拟仿真在课堂教学中的应用
2016-05-30顾洲
顾洲
摘要:《自动控制原理》课程具有较强的理论性,内容抽象不易理解;知识点多,计算烦杂,且作图量大,给学生理解带来很大困难。存在着“教师难讲、学生难学”的情况,如将虚拟仿真技术应于传统的课程教学中,大量的推导计算与图形绘制将被一些指令所取代,解决了复杂的数学计算问题,避免学生狭隘地认为控制问题即为数学问题。虚拟仿真技术可以把抽象的理论变得生动,把烦杂的计算任务交给计算机,让学生对理论知识的掌握变得简单,为自动化课程的教学改革提供了良好的平台。
关键词:Matlab;可视化;教学实践
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2016)28-0178-02
一、引言
《自动控制原理》为自动化专业的核心基础课程,内容抽象不易理解;知识点多,计算烦杂,且作图量大。在传统的教学过程中,教师花费大量的时间和版面进行推导公式和绘制曲线,而且难以保证结果的精度和准度,也不能反映系统动态响应过程,影响了课堂教学效果。计算机技术的飞速发展,各种应用软件层现叠出,在控制理论领域MATLAB应用最为广泛,进行适当编程,即可分析控制系统的动静态性能。
(一)研究参数变化对系统的影响
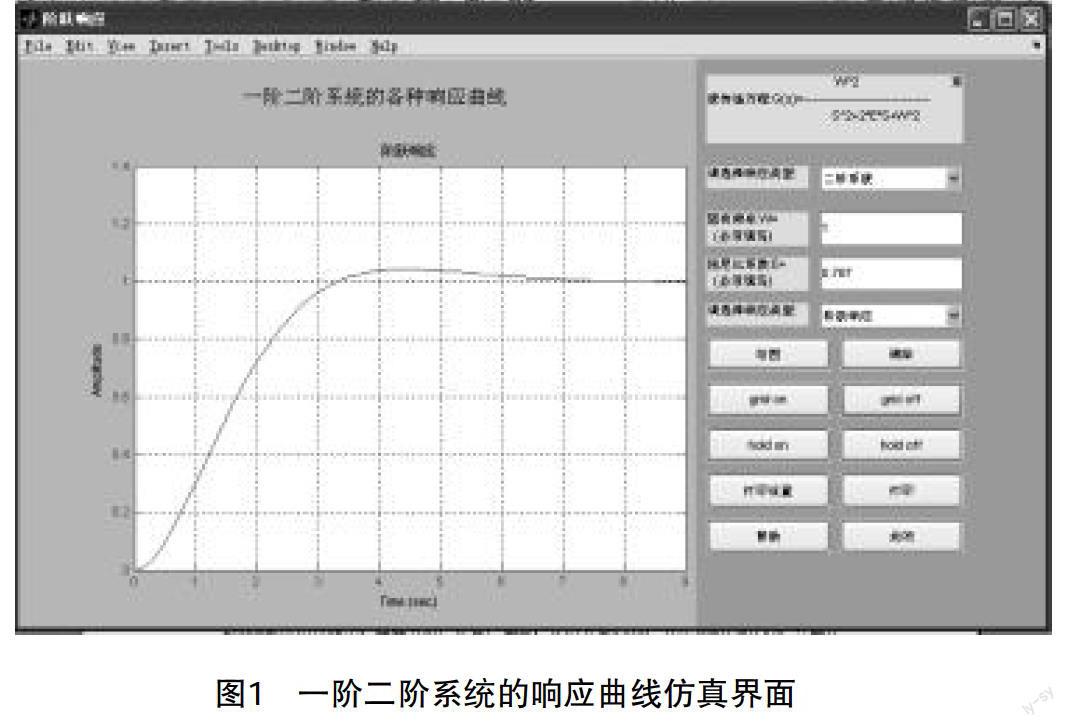
由于MATLAB具有很多成熟的控制系统的库函数,对于本科教学中的控制问题只需调用库函数即可实现。我们通过改变系统的控制参数或对象参数来分析和理解该参数对系统产生的影响,让复杂的问题变得简单,抽象的问题变得直观,便于学生理解,把必须到实验室的硬件环境搬到课堂,增强学生学习的自信心以及学习兴趣,同时学生在自学过程中,也可以作为练习验证的工具。作者通过Matlab的GUI编程,编写了可视化的仿真工具,如图1。
在图1所示的仿真界面中,有两个组合框可以选择是一阶系统还是二阶系统,其形式分别是■和■,以及响应曲线方式的选择(阶跃响应、脉冲响应和斜坡响应);另外还有两个编辑框用于编辑一阶和二阶系统的参数,在选择一阶系统时,可供编辑的参数为时间常数T和比例增益K;在选择二阶系统时,可编辑参数分别为固有频率ω和阻尼系数ξ,通过改变参数,可以形象生动的看出不同的参数对系统的影响。
(二)研究不同方法分析稳定性的一致性
控制系统的研究核心问题即为系统的稳定性问题。以线性定常系统为例,其稳定性问题的研究方法很多,在经典控制理论中大致包含:(1)画出响应曲线;(2)研究系统闭环极点的分布情况;(3)通过劳斯判据判断;(4)Nyquist曲线和Nichols曲线分布;(5)通过bode图研究。其中,(1)~(4)为时域分析方法,(4)~(5)为频域分析方法。对上述几个问题进行分析,如果不借助于计算机仿真技术,只是通过理论计算,将占用大量的课堂时间,而且学生不能很好掌握。
本文通过Matlab仿真软件开发的经典控制系统仿真软件,通过组合框系统类型,通过编辑框填写合适参数。如在方法(1)中,曲线最终收敛于1则说明系统是稳定的,否则是发散的。在方法(2)中,通过观察闭环极点的分布情况,判断系统的稳定性,如果闭环系统的根都具有负实部,则系统稳定;否则系统处于临界稳定或发散。闭环系统极点分布情况,可以由闭环系统的特征根得出,或分析开环系统的根轨迹分布情况来确定。而手工求解特征根对于高阶系统是不可行的。根轨迹曲线也只能是草图。通过Matlab则可方便地得到系统根的分布状况,如单位反馈系统的开环系统的传递函数为G(s)=.
可编写指令:num=[0.5 1];den=[0.5 1 1];[root,k]=rlocus(num,den),可方便得到根轨迹分布图,同时还可以得到根轨迹增益K和其对应的闭环系统的根root。对于确定的根轨迹增益,还可以通过roots命令求出其闭环特征方程的根,以确定其是否稳定。在经典控制理论中,我们还可以分析在不同频域范围的稳定性,如bode图、Nyquist图和Nichols图。
(三)控制系统设计依据
根轨迹分析方法是一种图解方法,也即通过分析控制系统的某一参数从零变化到无穷时,闭环系统特征根在S平面上的分布情况。在教材中提供了绘制根轨迹的若干规则,根据规则可以得到相应的草图。但依然需要大量的分析、计算、描点等过程。
(四)学生做题的验证工具
在课堂教学中布置的作业,学生可以进行仿真验证。学以致用,对控制理论的学习,我们不能让学生把控制理论简单地理解为数学推导或只会套用一些公式,我们应该引导学生思考控制系统的理论体系,学会分析系统参数的变化对控制性能的影响,从理论分析现象到从现象中寻找理论依据,从而更好地理解控制理论是精髓。如果通过硬件环境去验证,将花费大量的精力和物力,甚至有一定的安全问题。而Matlab软件给我们提供了快捷的分析工具,减少了大量的计算和时间,让学生有可能去大胆探索、验证和改进。
二、结论
通过引入MATLAB对控制系统进行仿真,可以帮助学生对控制理论中的一些概念的深入理解,参数变化对控制系统性能的影响,大胆设计与验证控制参数。在今后的教学过程中,将按模块化对《自动控制原理》中的一些问题进行虚拟仿真设计,切实提高教学质量。
参考文献:
[1]燕涛,朱莉,翁智.“自动控制原理”实验教学改革探索与实践[J].实验室研究与探索,2013,(11).
[2]满红,王琳,邹存名,冀勇钢.浅谈现代教育技术在自动控制原理精品课程建设的作用[J].中国教育信息化,2011,(5).
[3]李振龙,乔俊飞,孙亮,于建均,杨金福,陈梅莲.自动控制原理课程体系结构和教学方法探讨[J].教学研究,2009,(2).
[4]刘艳,尤源.《自动控制原理》课虚拟实验教学的改革与实践[J].装备制造技术,2010,(4).
[5]郭爱文,余亮英.“自动控制原理”在核工程与核技术专业教学中的探讨[J].中国电力教育,2014,(09).
[6]范兴刚,徐新黎,王万良.“自动控制原理”国家精品资源共享课程建设[J].电气电子教学学报,2014,(02).
[7]刘宝,孟令雅,王钊,盛立,于佐军.“自动控制原理”课程特色教学研究与探索[J].电气电子教学学报,2013,(05).
[8]夏静萍,王瑛.自动控制原理实验教学探究——基于实物命题的递进式教学法[J].实验室研究与探索,2013,(12).
[9]金鑫,谢昭莉,盛朝强,王雪,李斌,黄建明,毛永芳.“自动控制原理”实验教学改革创新与实践[J].电气电子教学学报,2009,(S2).
[10]李向群,刘浩,罗诗敏,杨龙月,翟周林.电网混沌系统的T-S模糊非线性PI控制[J].电力系统及其自动化学报,2012,(02).
