基于CAN总线的飞行模拟器油门台控制系统*
2016-05-30
(天津工业大学,天津 300387)
油门台是飞行模拟器模拟操控系统的关键部件之一,主要作用是为飞行模拟器油门控制系统提供操作指令,同时飞行员通过油门台上的反作用力可以判断飞机的运动状态,从而提高飞机操纵品质和飞行品质[1]。因此,油门台及其控制技术成为目前研究的一个热点问题和重要方向且能与飞机的飞行状态建立紧密联系。
由于数字计算机的使用以及采用其他新技术,极大地增强了飞行模拟器的功能,提高了各种座舱设备的模拟精度。随着大、中型数字电子计算机及微型计算机的飞速发展,越来越多的计算机控制飞行模拟器被设计研发出来并应用于飞行员的培训工作中。就飞行模拟器油门台系统而言,国外研究起步较早且发展迅猛,已能真实模拟飞行器的各种功能状态[2-3],而国内研究还在起步发展阶段,以往针对飞行模拟器的油门台控制系统大多仍然停留在采用人为机械操作[4],对于自动导航控制功能,即油门台的随动功能仍存在一定的空白点,一定程度上阻碍了飞行模拟器自动化程度的提高。
针对此类现状,本文对油门台的随动功能增加了油门杆伺服装置。提出为了确保在任何条件下,特别是在自动油门杆控制出现故障时,飞行员对油门杆的操纵始终拥有最高的控制权限,不能完全采用全电传控制,必须保留人为机械操纵备份。
1 控制系统方案
1.1 油门台结构
图1为油门台机械结构图,飞行模拟器油门台主要由操纵杆及其上反推力杆连接的各传感器反馈位姿信息,由电机通过电磁离合器控制操纵模式切换,再通过一系列的传动链传递给操纵杆,控制操纵杆的动作。通过油门台上各卡槽位点,增加飞行员模拟训练的力感。
对飞行模拟器油门台的控制有手动和随动两种操纵控制模式。手动模式时,飞行员通过人为操纵油门台操纵杆操纵发动机;随动模式时,通过油门控制计算机把位姿信号传送给油门台,然后由电动伺服装置转换为机械位移信号,以达到位置要求。其具体控制要求如下:
(1)各油门杆每次运动到相同位置输出的位置信号的偏差小于2%,微调的分辨率小于0.5°,两杆在平齐位置时输出的位置信号的偏差小于1%。
(2)油门台的手动信息反馈和随动信息给予通过CAN2.0B与上位机通信。上位机命令随动状态启动时,电磁离合器吸合,只有在上位机命令停止随动或人为突然施加一定的连续推力时,电磁离合器才会断开,随动状态停止。
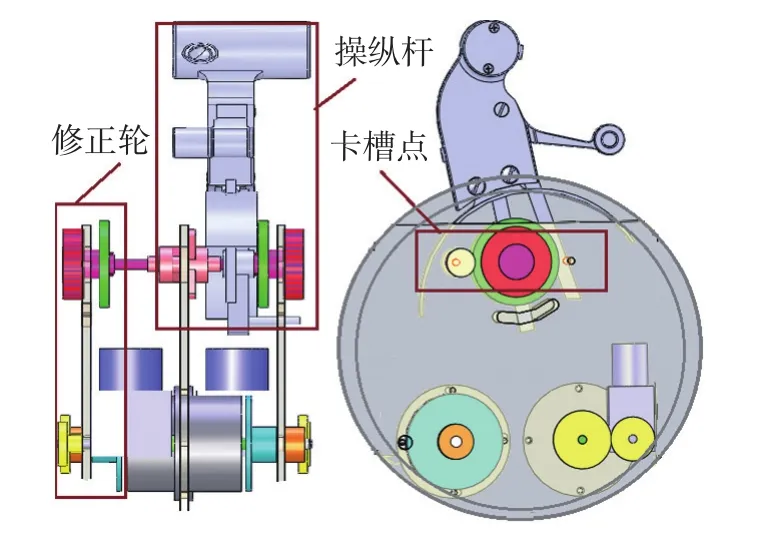
图1 油门台机械结构Fig.1 Mechanical structure of throttle
1.2 控制系统方案
由于油门台的手动模式和随动模式是相互独立的,因此可采用离合器让手动和随动分开,互不干扰。
油门台在手动模式下,继电器模块未接通信号,离合器不吸合,而油门杆每有角度转过时,通过与其啮合的齿轮带动电位器转动,通过AD转换后,再反馈给上位机,实现位置信息实时读取。
油门台在随动模式下,如图2所示,上位机将信号传递给主控板,要求主控板给继电器模块信号使离合器吸合工作,在电机驱动模块驱动下电机转动,从而带动推力杆在其轨道内旋转,进而由电位器反馈回位置信息。主控板实时比较当前位置与目标位置,以决定电机下一步动作。
1.3 主控系统设计
以AT90CAN128为主控芯片,设计一套主控电路,该主控电路可以输出2路频率可调的PWM波形、可以输入2路独立的模拟量信号(电位器1和电位器2)AT90CAN128为Atmel公司的一种低功耗CMOS 8-bit AVR单片机,RISC架构,拥有128k的系统内程序可编程闪存和CAN控制器[5]。

图2 控制系统设计方案Fig.2 Design scheme of control system
CAN控制器:采用Mob(消息对象)方式进行数据发送和接收,共有15个Mob,它们具有相同的属性和11位标识符(2.0A 协议),也可扩展至29位(2.0B协议);最多为8字节数据缓冲(静态分配);Tx、Rx帧缓冲或自动响应配置。
定时器:定时器0和定时器2:输出8位PWM波形,传递给L298N驱动模块,用于控制直流电机的转速,进而控制油门杆随动速度的改变。
8路10位SAR ADC引脚:其中2路连接电位器1和电位器2;电位器可以将油门杆的位置信号转换为电压信号,通过ADC转换功能转换为10位的数字量(0~1024)。另外,2路连接两电机点数电流检测信号,用于检测在油门杆随动过程中是否有人为的操控操作。
32×8个通用I/O接口:连接油门台上的3个按压开关和1个拨钮开关。
2 CAN通信软件
2.1 CAN控制器应用层协议
系统中油门台与上位机保持通信,同时上位机还需负责对系统数据的接受与管理、控制命令的发送以及设备状态的实时显示,而CAN总线可以方便地实现这一功能,使现场设备方便地连接到上位计算机上。通过主控芯片对油门杆位置信号进行监测,对电位器反馈的数据进行打包处理并将处理后的数字信号通过CAN总线发送到上位机中,而控制系统中的数据传送和接收都是通过CAN总线接口实现。
本文采用250Kbps通信波特率;标准8字节长数据帧格式[6];预置上位机PC的ID号为0xA5,油门台的ID号为0x5B;实时接收上位机信号并定时16ms输出油门台动作状态信息(包括油门台的按键信息和油门台左右随动杆的位置)。
如表1所示,0xaa为PC向油门台发送的控制指令和数据要求,K1~K4分别为油门台启停、暂停恢复、左油门杆随动启停、右油门杆随动启停信号;0xa0和0xa1分别为PC发送左右油门杆随动数据指令,LS1/RS1 +LS2/RS2组合构成目标角位移,LV1/RV1 +LV4/RV4组合构成目标角速率;而0xb0为油门台向上位机返回油门杆位置信息,WLS、WRS分别表示左右油门杆位置;0xb1为油门台上开关按键信息,每个数据字表示2个开关量,高4位表示左杆开关,低4位表示右杆开关。
2.2 标识符和验收滤波初始化
CAN初始化主要用来实现CAN工作时的参数设置,如果不经过初始化就不能工作。初始化的内容包括硬件使能、设置总线波特率、设置中断工作方式、设置验收滤波器工作方式、设置控制器工作模式等[7-9]。
CAN节点通过标识符来识别CAN帧是否为系统需求,识别方法通过滤波屏蔽寄存器设置完成,接收滤波寄存器设置标识符每位的值,接收屏蔽寄存器一般有相同的数量匹配接收滤波寄存器,规定接收滤波寄存器标识符每一位的值是否需要进行匹配,从总线上接收CAN帧,然后依次将收到的CAN帧标识符与接收滤波和屏蔽寄存器进行匹配,符合某对接收滤波和屏蔽寄存器要求后即停止匹配,将数据接收到对应的缓冲器中。
因此,在CAN的初始化中对标识符和验收滤波的设置尤为重要[10]。在系统中设定邮箱Mob0、Mob3、Mob4分别为接收PC发送的控制指令、左杆目标信息、右杆目标信息,Mob1和Mob2为油门台发送给PC油门杆位置和开关状态信息。图3为具体初始化流程。
2.3 传输数据信息的获取和转换
(1)模拟量信号:由定时器出发,通过多次采集油门杆位置信息,再经一定滤波算法处理转换成角度信息,再构造成CAN发送数据帧格式,反馈给上位机。上位机给出的随动目标信息经解析后先与油门杆当前位置进行实时比较,然后确定相应电机进一步动作。
(2)开关量信号:依照通信协议要求每个数据字表示2个开关量,则在构造开关状态信息数据时,利用“与”逻辑关系,开关按键和相对应数据位置“1”进行“与”的逻辑运算,则获取了开关按键状态信息,再构造发送数据格式,传递给上位机。
3 试验测试
使用PCI-9820短卡及其测试软件,实现主控板与PC机的CAN通信测试,CAN-bus通信测试软件是一个专门用来对所有ZLGCAN系列板卡进行测试的软件工具[11]。
CAN初始化参数,波特率设置250kbps,则通过测试,数据结果稳定,精度上和反应时间满足要求,其CAN测试命令数据含义如表2所示,具体测试应用显示如图4所示。
飞行模拟器油门台控制系统整体性能实现依据:
(1)保证两油门杆运动的独立性和随动速度可调性。
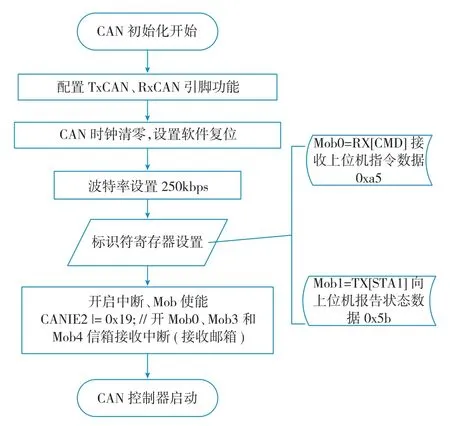
图3 CAN初始化流程Fig.3 Initialization flow of CAN

表1 油门台数据通信协议
两油门杆分别由2个不同直流电机驱动;每个油门杆具有自己独立的传动系统;通过修改主控电路板上每个油门杆对应PWM输出口的波形频率,调制直流电机两电极间的电压,从而修改油门杆的转速。

表2 CAN 测试命令数据含义

图4 CAN通讯测试Fig.4 Test of CAN bus
(2)实现油门杆的随动和手动2种操作模式。
在每个传动链中,装置了1个离合器。当电磁线圈得电时,离合器的主动部分和从动部分相连,电机减速器的输出轴与同步带小轮的输入轴连接在一起,通过同步带传动带动油门杆随动;当电磁线圈失电时,离合器的主动部分和从动部分分离,电机减速器的输出轴与同步带小轮的输入轴断开,油门杆退出随动状态进入手动状态。
(3)保证各油门杆位置信号的感知及精度。
在每个油门杆对应的同步带传动机构的小轮轴与1个电位器的输入轴用固连器固连,通过该电位器能将该小轮轴所转过的角度转换为电压的变化。同步带机构的减速比为2,即小轮转速为大轮转速的2倍,因此小轮轴转过的角度是大轮转过角度的2倍。通过主控电路将电位器输出的电压模拟信号转换为数字信号,再转换成对应的角度值。
电位器输出的电压信号为连续的模拟信号,其分辨率高于数字形式的旋转编码器;主控电路的ADC转换是10位的精度,即分辨率为360°/1024=0.35°,由于同步带机构的减速比为2,因此油门杆的位置分辨率可达到 0.35°/2=0.175°。
4 结论
本文系统阐述了飞行模拟器油门台控制系统设计,重点论述了系统体系结构的确立,与整机模拟器的通信实现。试验结果证明此控制系统是有效可行的,工作稳定,性能可靠,对飞行模拟器油门台随动控制的具体实施有重要参考价值。
[1]GONG H, ZHEN Z, LI X, et al.Automatic flight control system design of level change mode for a large aircraft[J].International Journal of Advanced Robotic Systems, 2013, 10(2):323-330.
[2]MEOLA D, IANNELLI L, GLIELMO L.Flight control system for small-size unmanned aerial vehicles: Design and software-in-the-loop validation[C]// Conference on Control & Automation.IEEE, 2013: 357-362.
[3]DRAPER M H, MILLER C A, BENTON J, et al.Multiunmanned aerial vehicle systems control via flexible levels of interaction:an adaptable operator-automation interface concept demonstration[C]//Infotech@ Aerospace 2013 Conference.2013.
[4]李应涛.舰载飞机的进场动力补偿和自动油门控制系统设计[D].成都:电子科技大学,2007.
LI Yingtao.Approach power compensation and automatic throttle control system design of ship borne aircraft[D].Chengdu: University of Electronic Science and Technology of China,2007.
[5]陈应豪,罗飞,许玉格.基于AVR处理器at90can128的CAN总线应用[J].微处理机,2010(4):94-97.
CHEN Yinghao, LUO Fei, XU Yuge.The application of CAN bus based on AVR AT90CAN128[J].Microprocessors,2010(4):94-97.
[6]刘显贵,何翠群,初长宝.基于CAN通讯的汽车底盘系统集成控制[J].农业工程学报,2010,26(7):163-168.
LIU Xiangui, HE Cuiqun, CHU Changbao.Integrated control of vehicle chassis system based on controller area network[J].Transactions of the CSAE,2010,26(7):163-168.
[7]卢永杰,孙希杰.基于CAN总线的电机监测与控制系统设计[J].自动化与仪器仪表,2013(1):48-50.
LU Yongjie, SUN Xijie.Design of motor monitoring and control system based on CAN bus[J].Automation and Instrumentation,2013(1):48-50.
[8]贺安超,刘卫国,马珊.基于CAN总线的多电机嵌入式监控系统设计[J].计算机测量与控制.2011,(7):1605-1607,1638.
HE Anchao, LIU Weiguo, MA Shan.Design of embedded multimotor monitor system based on CAN bus[J].Computer Measurement &Control,2011(7):1605-1607,1638.
[9]BAOMING W, ZHIGUANG G, MANLI C.Research on the control system of hydraulic support based on can bus[J].Energy Procedia,2011(11):1923-1928.
[10]张立云,宋爱国,钱夔,等.基于CAN总线的侦察机器人控制系统设计[J].测控技术,2013(1):65-68.
ZHANG Liyun, SONG Aiguo, QIAN Kui, et al.Design of control system of reconnaissance robot based on CAN[J].Measurement & Control Technology,2013(1):65-68.
[11]致远电子.通用PCI转CAN接口卡[EB/OL].(2013-10-15)[2014-05-20].http://www.zlg.cn/sitecn/CAN-bus/product_107177177_89.html.
Zhiyuan Electronics.General PCI to CAN interface card[EB/OL].(2013-10-15)[2014-05-20].http://www.zlg.cn/sitecn/CAN-bus/product_107177177_89.html.
