自旋阀GMR传感器及免疫磁珠检测
2016-05-25杨峰
杨 峰
(四川文理学院 国有资产管理处,四川 达州 635000)
自旋阀GMR传感器及免疫磁珠检测
杨峰
(四川文理学院 国有资产管理处,四川 达州 635000)
摘要:巨磁阻(GMR)生物传感器的直接检测对象是免疫磁珠,对免疫磁珠的检测水平直接决定着生物样品检测的质量. 因此,基于GMR生物传感器的免疫磁珠检测研究具有重要意义. 本文介绍了自旋阀GMR生物传感器对免疫磁珠检测的原理; 利用课题组自行研制的自旋阀GMR芯片搭建免疫磁珠检测系统; 用搭建的检测系统进行了免疫磁珠检测实验. 实验结果表明: 自旋阀GMR传感器表面的免疫磁珠浓度越大时,其输出信号的变化量也越大.
关键词:巨磁阻; 自旋阀; 生物检测; 免疫磁珠; 生物传感器
0引言
巨磁阻生物传感器主要由GMR传感器和信号检测电路组成,其检测对象是含有免疫磁珠标记的生物样品[1]. GMR传感器具有灵敏度高、 探测范围宽、 抗恶劣环境和制备成本低等优点[2,3],而且可以采用现有的微电子加工工艺制造,使得GMR传感器易于集成化. 目前,巨磁阻材料有多层膜、 自旋阀和隧道结等多种结构类型,用它们制作的GMR传感器均可用于生物样品的探测[4-8].
用GMR生物传感器进行生物检测的一般步骤是: ① 在传感器表面固定用于特定检测的生物探针; ② 将生物样品的目标分子与免疫磁珠结合完成磁标记; ③ 当完成磁标记的待测生物样品试液流过传感器表面时,样品试液中的目标生物成分将被固定在传感器表面的生物探针捕获; ④ 在施加的外部激励磁场的作用下免疫磁珠产生附加磁场,它会使GMR传感器输出信号发生变化,从而实现对生物样品的探测[9]. 可见GMR传感器的直接检测对象是免疫磁珠,对免疫磁珠的检测水平将直接决定着对生物样品的检测质量.
1自旋阀GMR传感器检测免疫磁珠的原理
1.1自旋阀GMR传感器
本实验中所使用的GMR芯片是半桥结构形式的,包含两个自旋阀结构GMR. 两个自旋阀GMR的敏感轴相互平行,但是它们的钉扎方向相反. 当无外磁场时它们的电阻值大致相等. 首先将GMR芯片粘贴在事先根据它的引脚特点制作好的PCB板上. 然后采用线径为50 μm的金线将电极引出,再焊接到PCB板的电极上,以便于从PCB板上更大的电极上引出连接线. 最后,利用两个普通电阻与GMR芯片的两个磁电阻构成惠斯通电桥. 为了使设计的惠斯通电桥在没有外磁场时输出为零,需要调整外加的两个电阻的阻值使电桥处于平衡状态. 图1 为GMR芯片实物图.
设计好的GMR惠斯通电桥原理如图2 所示,R1和R2为自旋阀结构的GMR,它们的电阻值在无外磁场时相等,敏感方向互为反平行. 当外加磁场的方向与自旋阀GMR的敏感方向相同时,其电阻值增大; 当外加磁场的方向与自旋阀GMR的敏感方向相反时,其电阻值减小. 对于同一大小、 方向的外磁场,两个自旋阀GMR的电阻值变化量相等. 这样设计芯片是为了提高传感器输出信号的灵敏度.R3和R4为普通电阻. 没有磁场时,惠斯通电桥处于平衡状态,没有信号输出.
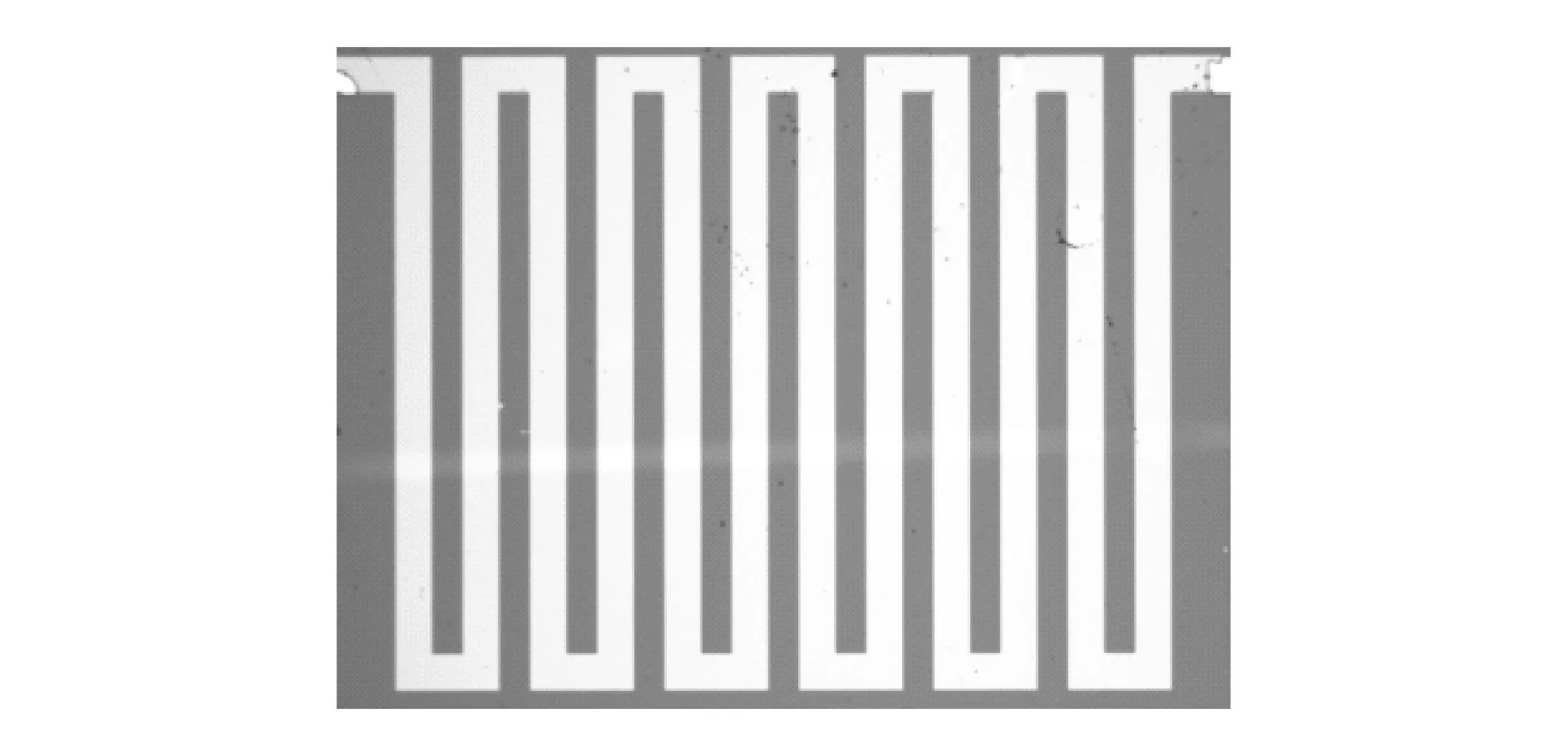
图1 GMR芯片实物图Fig.1 Picture of the GMR chip
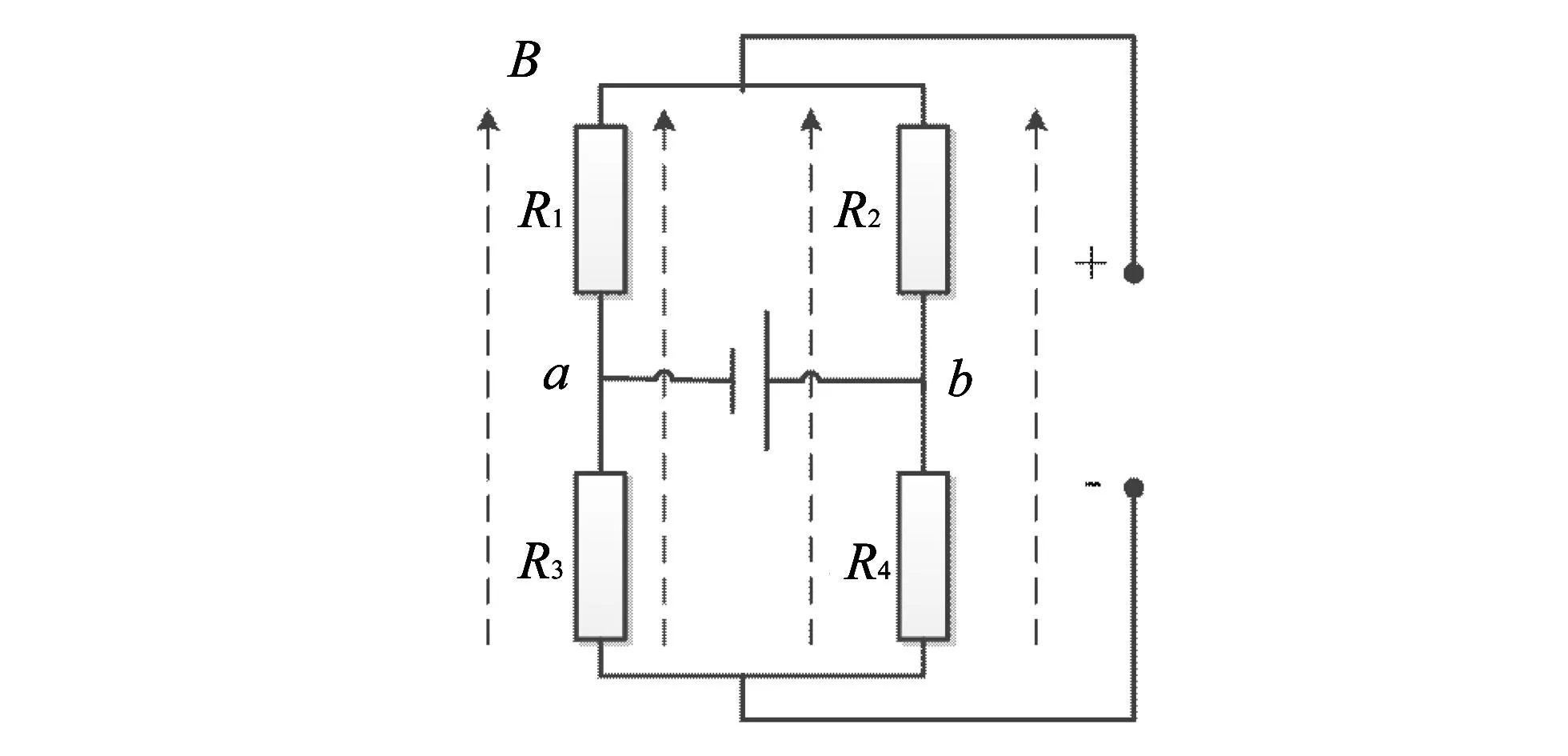
图2 GMR惠斯通电桥原理图Fig.2 Principle diagram of the GMR Wheatstone Bridge
在电桥a,b两端施加直流电压Vd. 当在平行于自旋阀GMR的敏感方向施加磁场H时,R1和R2的电阻值将发生变化,一个增大另一个减小,设变化量为ΔR0,则有
(1)
而R3和R4的电阻值不随外加磁场而变化,设其阻值为R,那么有
(2)
电桥c,d两端的输出电压信号为
(3)
设在某一磁场大小范围内,自旋阀GMR的电阻值的变化量ΔR0与磁场B之间存在一个线性变化关系
(4)
式中: k为常量. 将式(4)带入式(3)中,则有
(5)
式中:k,Vd和R0都为常量,所以,自旋阀GMR传感器的输出电压信号与外加磁场成正比关系.
1.2免疫磁珠检测的原理
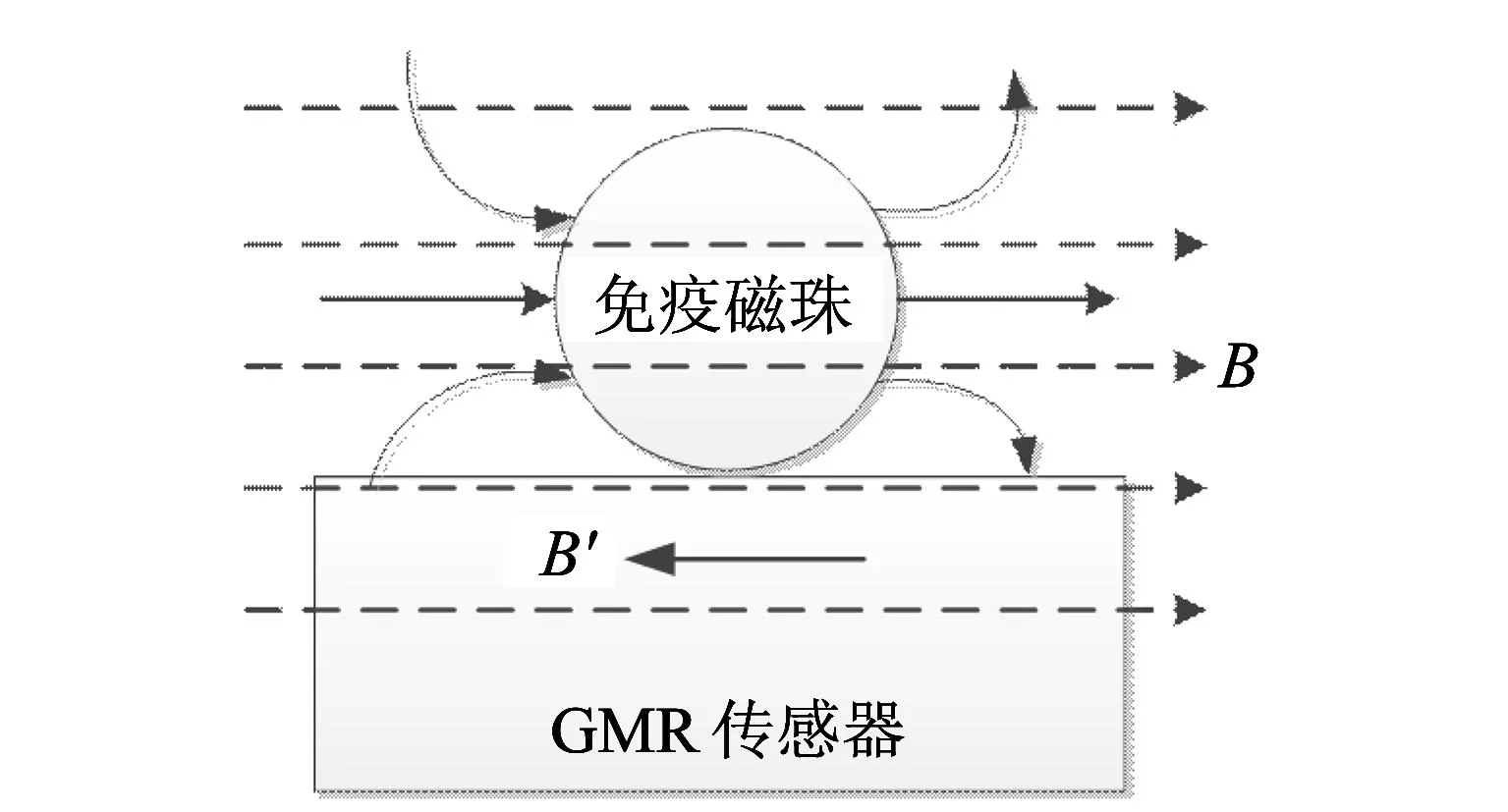
图3 免疫磁珠检测原理图Fig.3 The principle diagram of immune magnetic beads detection
免疫磁珠具有超顺磁性[10],也就是当有外磁场时显示有磁性,而没有磁场时不显磁性. 当对放置在GMR传感器表面的免疫磁珠施加激励磁场时,免疫磁珠就会产生感应磁场. 当沿着GMR的敏感方向施加外磁场B时,免疫磁珠在GMR传感器表面产生的感应磁场B′与外磁场B的方向相反,就会削弱外磁场B对GMR传感器的作用,如图3 所示.
在用自旋阀GMR传感器对免疫磁珠进行检测时,它的输出信号可以近似看成是单个免疫磁珠引起的自旋阀GMR传感器输出信号的累加. 由式(5)可得单个免疫磁珠时输出信号的变化量为
(6)
当GMR传感器表面有n个免疫磁珠时,其输出信号的变化量为
(7)
所以,当自旋阀GMR表面上免疫磁珠的数量越多时,施加免疫磁珠前后自旋阀GMR传感器输出信号的变化量就越大. 反过来也可以通过比较施加免疫磁珠前后GMR传感器输出信号变化的大小,来确定免疫磁珠的浓度或数量信息.
2实验及结果分析
2.1自旋阀GMR传感器特性测试
用自旋阀GMR传感器做免疫磁珠检测实验之前,需要确定惠斯通电桥自旋阀GMR传感器的输出特性,即找出传感器的输出电压信号与外加磁场之间的变化曲线,确定出传感器的线性工作区域.
我们设计制作了亥姆霍兹线圈,并搭建测试平台. 采用+5V直流电压源为自旋阀GMR传感器供电,并将其放置在亥姆霍兹线圈中央,使自旋阀巨磁电阻的敏感轴与亥姆霍兹线圈的主轴平行,如图4 所示. 亥姆霍兹线圈产生的均匀磁场的方向就平行于巨磁电阻的敏感轴.
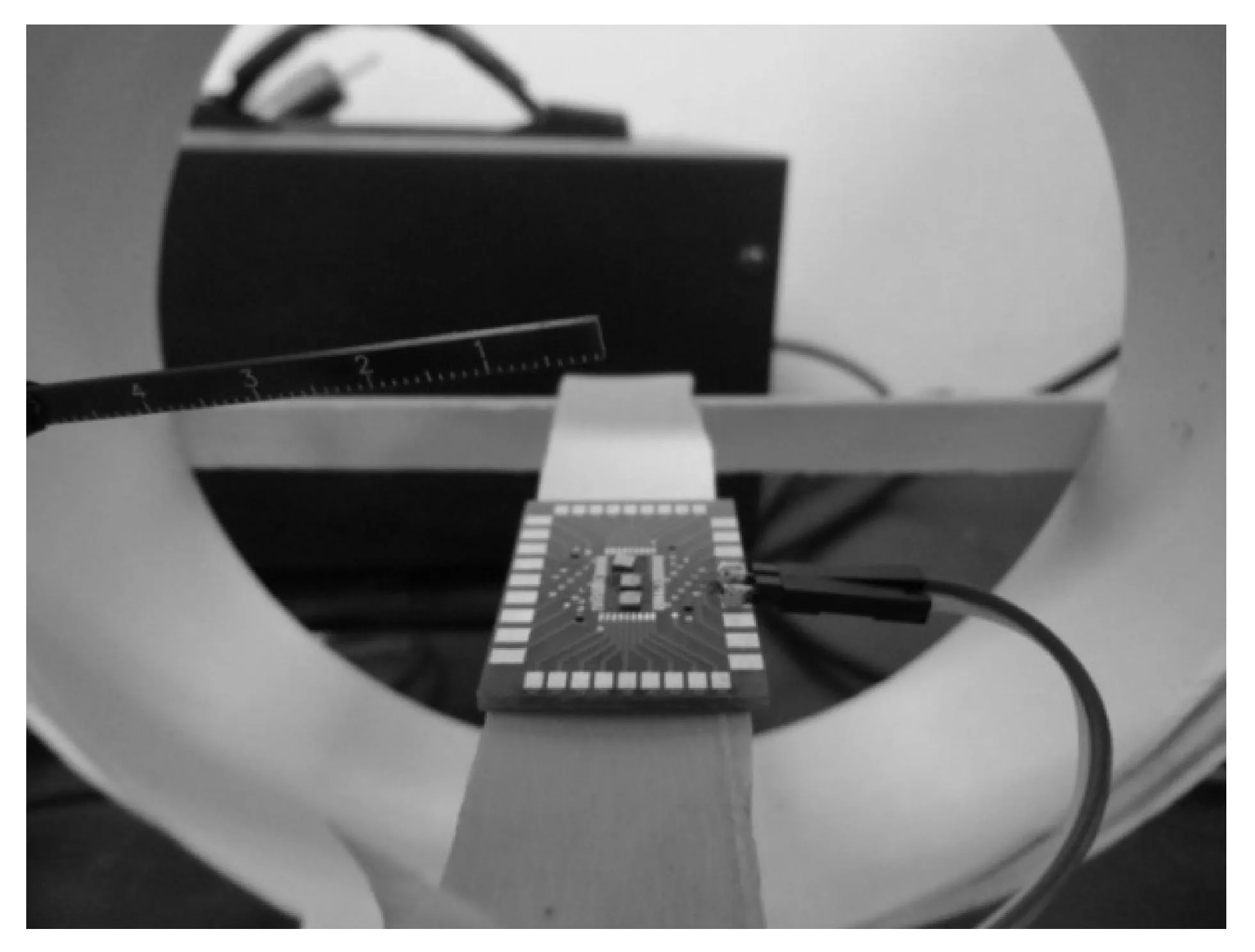
图4 自旋阀GMR传感器特性测试Fig.4 Characteristics test of the spin valve GMR sensor
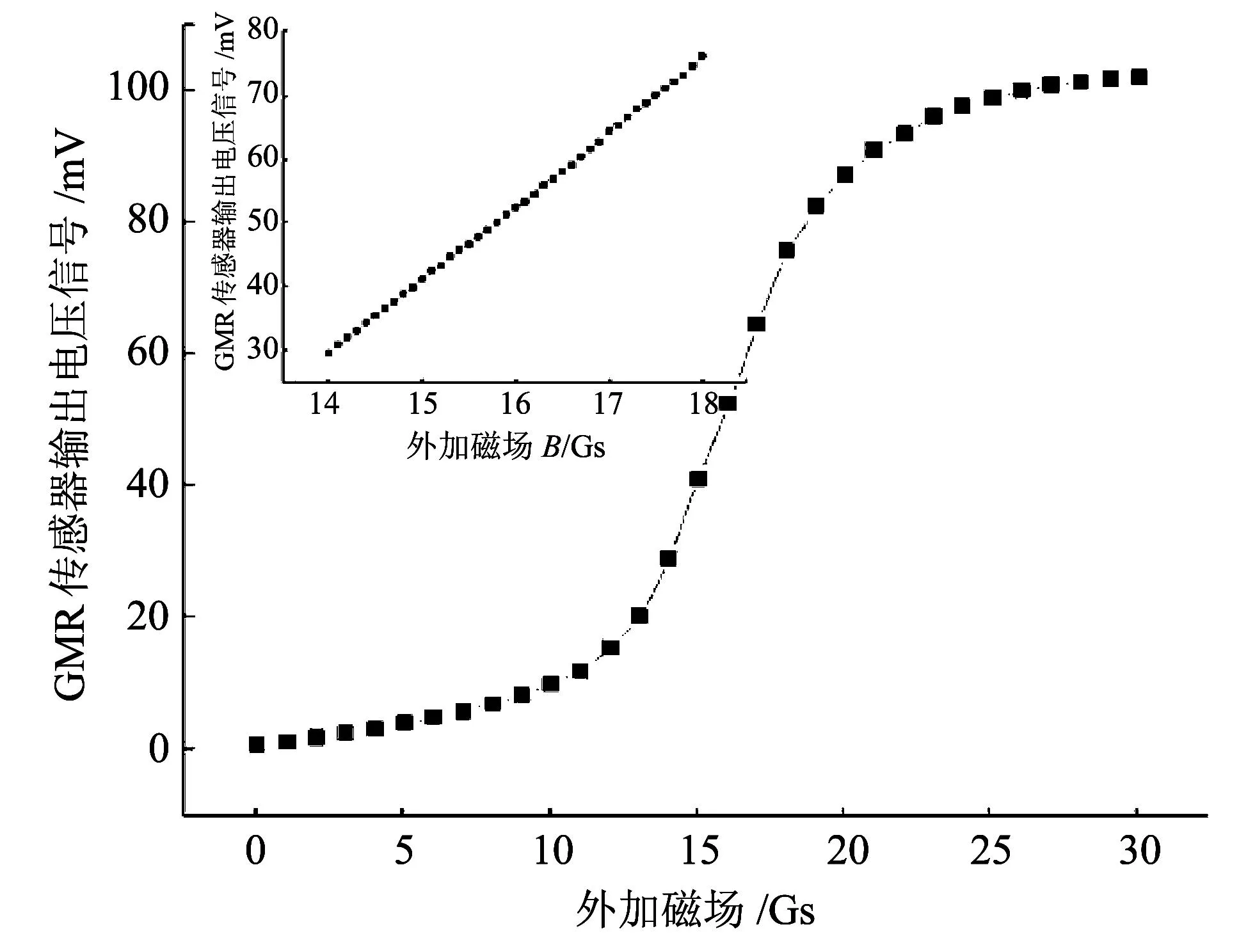
图5 自旋阀GMR传感器特性曲线Fig.5 Characteristic curve of the spin valve GMR sensor
用恒流源对亥姆霍兹线圈供电,改变通过亥姆霍兹线圈的电流的大小就可以改变磁场的大小. 磁场的大小用高斯计实时测量,用电压表测量自旋阀GMR传感器输出电压信号的大小. 这样就可以测出自旋阀GMR传感器的输出电压信号与磁感应强度之间的关系,确定其线性变化区域.
实验时,首先在磁场为0~30Gs范围内每隔1Gs取一点,得到自旋阀GMR传感器的输出电压信号与外加磁场之间的关系曲线,如图5 所示. 当外磁场为零时,传感器有0.7mV的电压信号输出,这是由于电桥的各臂电阻不是完全精确匹配造成的. 由测试曲线可以看出,自旋阀GMR传感器在外加磁场为14~18Gs范围内存在线性区,且在该区域内自旋阀GMR传感器的灵敏度也最高.
为了更加精确地确定出自旋阀GMR传感器的线性区,实验条件不变,但是外加磁场从14~18Gs之间每隔0.1Gs取一点,记录下对应的传感器输出电压信号,得出输出电压-外加磁场关系曲线,如图5 左上角. 从图5 中可以看到自旋阀GMR传感器的输出电压信号与外加磁场之间存在着很好的线性对应关系. 在该区间作线性拟合得出的拟合直线为

(8)
由式(8)可见拟合直线的斜率为11.393 55,即磁场每变化1Gs,自旋阀GMR传感器的输出信号变化11.393 55mV. 拟合直线的线性相关度为0.999 7,可以认为在磁场为14~18Gs范围内,传感器的输出电压信号与外加磁场成正比关系.
2.2免疫磁珠检测
用直流电源为亥姆霍兹线圈供电,产生一个17Gs的均匀磁场,使自旋阀GMR传感器工作在线性区. 用高精度数字电压表测量传感器的输出电压.
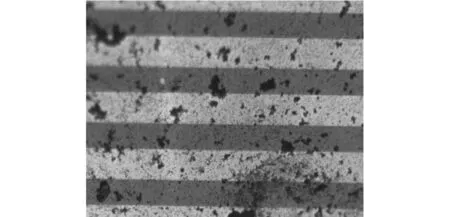
实验采用的是粒径为3~4μm的聚苯乙烯免疫磁性微球. 用乙醇按一定比例将其稀释后,由单道移液器注入到GMR传感器表面上. 图6 为显微镜下观察到的自旋阀GMR传感器表面的磁珠分布情况.
没有加入免疫磁珠时,自旋阀GMR传感器有一个基底信号V1输出. 当注入的次数越多时,传感器表面的免疫磁珠数就越多,其产生的感应磁场也就越大. 设传感器的输出信号为V2. 根据第二部分的理论可知,免疫磁珠在自旋阀GMR传感器表面产生的感应磁场方向与外加激励磁场的方向相反,即感应磁场削弱了外磁场的作用,所以有V2 图6 GMR传感器表面的磁珠Fig.6 The exterior magnetic beads of GMR sensor 试验次数输出信号V2/mV变化量ΔV/mV160.872.13259.573.43358.394.61457.025.98555.957.05 由实验结果可见,当向传感器表面注入免疫磁珠时,传感器的输出信号有明显的变化. 且随着注入免疫磁珠次数越多(即传感器表面免疫磁珠的数量越多),传感器输出信号的变化量也越大. 3结束语 设计制作了惠斯通电桥自旋阀GMR传感器,并对其进行特性测试,找出它的线性工作区; 然后在传感器的线性工作区内,进行了免疫磁珠检测实验,实验结果表明: 当传感器表面上免疫磁珠数量增多时,传感器输出信号的变化量也越大,与理论分析相符合. 参考文献: [1]David R Baselt, Gil U Lee, et al. A biosensor based on magnetoresistance technology[J]. Biosensors & Bioelectronics, 1998, 10(13): 731-739. [2]Miller M M, Sheehan P E. A DNA array sensor utilizing magnetic microbeads and magneto-electronic detection[J]. J. Magn. Magn. Mater, 2001, 225(1/2): 138-144. [3]Rife J C, Miller M M. Design and performance of GMR sensor for the detection of magnetic microbeads in biosensors[J]. Sensor and Actuators: A, 2003, 107(3): 209-218. [4]Schotter J, Kamp P B. Comparison of a prototype magnetoresistive biosensor to standard fluorescent DNA detection[J]. Biosens Bioelectro, 2004, 19(10): 1149-1156. [5]Wang Yongqiang, Feng Jie. Detection of commercial magnetic microbeads with giant magneto resistance sensors[J]. Journal of Vacuum Science and Technology, 2009, 29(4) : 359-363. [6]Graham D L, Ferreira H. Single magnetic microsphere placement and detection on-chip using current line designs with integrated spin valve sensors: biotechnological applications[J]. J. Appl. Phys, 2002,91(10): 7786-7788. [7]Mischa Megens, Menno Prins. Magnetic biochips: a new option for sensitive diagnostics[J]. J. Magn. Magn. Mater, 2005,293(1): 702-708. [8]Shen W F, Liu X Y. In situ detection of single micro-sized magnetic beads using magnetic tunnel junction sensors[J]. Appl Phys Lett, 2005, 86(25): 253901-253903. [9]Shan X. Wang, Guanxiong Li. Advances in Giant Magnetoresistance Biosensors With Magnetic Nanoparticle Tags: Review and Outlook[J]. IEEE transactions on magnetics, 2008, 44(7): 1687-1702. [10]Manteca A, Mujika M, Arana S. GMR sensors:Magnetoresistive behaviour optimiza- tion for biological detection by means of superparamagnetic nanoparticles[J]. Biosensors and Bioelectronics, 2011(26): 3075-3079. Spin Valve GMR Sensor and Immune Magnetic Beads Detection YANG Feng (National Asset management Office, Sichuan University of Arts and Science, Dazhou 635000, China) Abstract:The direct detection object of the GMR biosensor is immune magnetic beads, and the level of immune magnetic beads detection directly decides the quality of biological sample detection. Therefore, the research of immune magnetic beads detection based on GMR biosensor is of great significance. First, this paper introduces the principle of immune magnetic beads detection by using Spin Valve GMR sensor; Then, built the immune magnetic beads detection system with the spin valve GMR chip, which was developed by our research group; Finally, immune magnetic beads detection experiment was carried out on the detection system. The experiment results show that: when the concentration of immune magnetic beads on the surface of the spin valve GMR sensor is higher,the output signal variation is greater. Key words:GMR; spin valve; biological detection; immune magnetic beads; biosensor 中图分类号:TP212.3 文献标识码:A doi:10.3969/j.issn.1671-7449.2016.02.007 作者简介:杨峰(1986-),男,硕士生,主要从事仪器科学与技术及其应用研究. 基金项目:四川文理学院青年启动项目资助(2014Z006Q). 收稿日期:2015-08-10 文章编号:1671-7449(2016)02-0132-05