考虑刹车灯影响的信号交叉口交通流模型研究
2016-05-25闫广聪姜茹嫣聂化东
彭 勇,闫广聪,姜茹嫣,聂化东
(1.重庆交通大学 交通运输学院,重庆 400074;2.烟台工程职业技术学院 动力工程系,山东 烟台 264006)
考虑刹车灯影响的信号交叉口交通流模型研究
彭 勇1,闫广聪1,姜茹嫣2,聂化东1
(1.重庆交通大学 交通运输学院,重庆 400074;2.烟台工程职业技术学院 动力工程系,山东 烟台 264006)
实际道路中前方车辆刹车灯会对后方车辆造成影响。在改进的刹车灯模型的基础上建立信号交叉口的元胞自动机模型,研究交通流速度、密度、排队长度及绿灯时长之间的关系;并与不考虑刹车灯模型时的信号交叉口元胞自动机模型进行对比分析。研究表明:考虑与不考虑刹车灯的影响,得到了相似的交通流速度、密度、排队长度及绿灯时长之间的关系,但刹车灯对信号交叉口交通流产生了影响,因此在信号交叉口交通流各种变量关系的分析中应考虑刹车灯的影响。
交通运输工程;交通流;信号交叉口;元胞自动机;绿灯时长;排队长度
0 引 言
城市道路交叉口处的服务水平不但与车流密度、速度等因素息息相关,同时也受到信号灯的影响。所以通过模型研究道路交叉口处的交通流显得至关重要。当前已有许多学者致力于利用元胞自动机来模拟道路交通流[1-2],D.CHOWDURY等[3]将BML和NaSch模型相结合以描述实际的交通特性,建立一个新的ChSch模型;李晓白等[4]提出了一个能近似考虑前车速度效应的改进的NS模型;谢娟等[5]建立了一种考虑驾驶速度受车流密度影响的一维元胞自动机交通流模型;也有很多学者利用元胞自动机构建信号交叉口模型,研究信号交叉口的车辆、行人以及公交车等的复杂行为[6-9]。实际道路中前方车辆刹车灯会对后方车辆造成影响,J. F.TIAN等[10]根据实际的驾驶条件提出了改进的刹车灯模型,但对于驾驶员驾驶条件的规定过于严格,且该模型未应用于信号交叉口交通流研究,而以往的信号交叉口元胞自动机模型也多以NS模型为基础。笔者在前人基础上,研究了改进的刹车灯模型,在此条件下研究信号交叉口交通流各变量之间的关系,并与未考虑刹车灯影响的NS模型进行对比分析。
1 考虑刹车灯影响的信号交叉口交通流模型
模型中道路由一个单交叉口和一条单行路段组成,如图1。
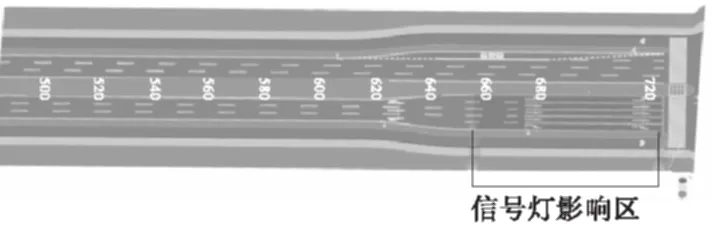
图1 单交叉口单行路段道路Fig.1 One-way road with a single intersection
在路段末端设置两相位信号灯,车辆行驶到路段末端后直接进入下一路段,在建立模型中不考虑红绿灯转换时间。由于红绿灯只能影响一定范围内的车辆,当车辆距离红绿灯较远时不受红绿灯影响,所以在构建元胞自动机模型时,将路段分为受信号灯影响区域(设为1/4L)[11]和不受信号灯影响区域。
1.1 不受信号灯影响区域车辆运行规则
在不受信号灯影响区域,车辆处于正常行驶状态,按照刹车灯模型的运行规则行驶。
Tian 模型虽然对驾驶员的驾驶实际进行了许多改进,使其更加符合驾驶实际,但是对于驾驶条件的规定仍然过于严格;且未考虑加速之后的减速对随机慢化的影响。基于上述问题,笔者改进Tian模型,并将其应用于信号交叉口,更新规则如下:
1)加速
(1)
2)确定性减速
(2)
3)确定随机慢化概率p和相应的减速参数Δv
(3)
(4)
(5)
(6)
式中:p为随机慢化概率;Δv为减速参数,m/s;d1,d2,d3为常量;α,β为常数参数,通过参数(α1,α2,β1,β2)来确定,车辆在确定性减速速度变小之后,随机慢化概率和减速参数的变化,参数的大小关系为α1<α2,β1<β2;tst为车辆停止的时间。
4)随机慢化
(7)
式中:rand()为0和1之间均匀分布的随机数。
(8)
6)确定tst
(9)
7)车辆运动
(10)
1.2 受信号灯影响区域车辆运行规则
1.2.1 车辆遇绿灯时的运行规则
在此时,车辆的行驶规则在刹车灯模型的基础上做以下的改进:
1)减速概率。在排队长度以内的车辆,当信号灯变位绿灯的时刻,此路段的车辆大部分都要加速离开,所以此时的车辆相对于自由运动模型,减速概率要更低一些。
2)触发条件。这种车辆加速离开的模型只有当在此路段的车辆遇到绿灯的时刻才可以按此模型进行演化更新。
3)适用路段。加速离队的模型只适用于受信号灯影响的路段。
1.2.2 车辆遇红灯时的运行规则
1)减速概率。在排队长度以内的车辆,由于受信号灯的影响,当信号灯变为红灯的时刻,车辆大部分都要减速排队等候,所以模型中减速概率相对于自由运动模型要更高一些。
2)触发条件。这种车辆减速排队的模型只有在此路段的车辆遇到红灯的时刻才适用。
3)适用路段。减速排队的模型只适用于受信号灯影响的路段。
2 计算机模拟和分析
计算机模拟采用周期性边界条件,道路长度为L=1 000个元胞,每个元胞长度为7.5 m,最大速度vmax=4元胞/s,信号灯周期时间T=90 s,模型演化时间步长为1 600 s。相关参数为:α1=0.5,α2=1,β1=0.5,β2=1,a1=2,a2=2,a3=1,d1=2,d2=1,d3=1,h=2,pb=0.6,p0=0.29,pd=0.05[6,10-12]。在受信号灯影响区域减速概率等参数调整规则如下。
1)当信号灯为红灯时:
pb=0.99,p0=0.44,pd=0.05
2)当信号灯为绿灯时:
pb=0.3,p0=0.1,pd=0.05
通过不考虑刹车灯影响的元胞自动机模型(简称NS模型)与笔者所给出的考虑刹车灯影响的元胞自动机模型(简称刹车灯模型)对比分析,研究刹车灯的影响及车流密度、车流速度、红绿灯时长以及排队长度之间的关系。根据计算机的模拟,得出两种模型下车流密度、平均速度、绿灯时长以及排队长度之间的关系(见图2)。

图2 两种模型下车流密度、车流速度、绿灯时长以及排队长度关系Fig.2 Relationship among traffic flow density, speed, the queue length and green time of two models
由图2(a)可见,考虑与不考虑刹车灯的影响,元胞自动机模拟得出了相似的车流密度、绿灯时长以及排队长度三者之间的关系。当车流密度一定时,随着绿灯时长的增加车辆的排队长度延误逐渐减少,当绿灯时长超过60 s时,随着绿灯时长的增加车辆的排队长度变化很小车辆的延误几乎不变。当绿灯时长一定时,随着车流密度的增加,在信号灯影响的范围内,车辆的排队长度逐渐增加。当密度超过某临界值时,车辆排队长度增速显著提高,此时调整绿灯时长缓解车辆堵塞效果不明显。
但在相同参数条件下,刹车灯模型中车辆的排队长度略小于NS模型中车辆的排队长度。
由图2(b)两种模型对比分析发现,考虑与不考虑刹车灯的影响,元胞自动机模拟得出了相似的车流密度、车流速度以及绿灯时长三者之间的关系。当绿灯时长一定时,随着密度的增加车辆的平均速度明显的减小。即,在同一信号灯下,随着车辆密度的增加,车辆的平均速度明显的减小,车流密度对车辆平均速度的影响较大。当密度一定时,绿灯时间增长,车辆平均速度增加,但增加幅度不明显,且随着密度的增大,车辆平均速度增加更不明显。
但在相同参数条件下,刹车灯模型中车辆的平均速度明显高于NS模型中车辆的平均速度。
总体来看,考虑与不考虑刹车灯影响,元胞自动机模拟得出了相似的车流密度、车流速度、排队长度及绿灯时长关系,但在相同参数条件下,两种模型对比分析表明,在对信号交叉口交通流进行分析时,应考虑刹车灯对车辆行驶行为的影响。
3 结 语
笔者考虑实际道路中前方车辆刹车灯对后方车辆的影响,改进了刹车灯模型使其更符合实际驾驶情况,并将之应用于信号交叉口交通流分析,建立了考虑刹车灯影响的信号交叉口元胞自动机模型,研究了交通流速度、密度、排队长度及绿灯时长之间的关系。通过与不考虑刹车灯影响的信号交叉口元胞自动机模型的对比分析发现,在相同参数条件下,刹车灯模型与NS模型存在差别,这表明在信号交叉口交通流分析中,考虑车辆实际行驶行为会受到刹车灯影响这一因素,得到的关于交通流速度、密度、排队长度及绿灯时长之间的关系更符合实际。
[1] KAI N, SCHRECKENBERG M. Cellular automaton model for freeway traffic. J Phys I (Paris) 2: 2221[J].JournalDePhysiqueI,1992,2(12):2221-2229.
[2] FUKUI M, OIKAWA H, ISHIBASHI Y. Flow of cars crossing with unequal velocities in a two-dimensional cellular automaton model[J].JournalofthePhysicalSocietyofJapan,1996,65(8):2514-2517.
[3] CHOWDURY D, SCHADSCHNIDER A. Self-organization of traffic jams in cities: effects of stochastic dynamics and signal periods[J].PhysicalReviewE,1999,59(2):1311-1314.
[4] LI X B, WU Q, JIANG R. Cellular automaton model considering the velocity effect of a car on the successive car[J].PhysicalReviewE,2001,64(6):116-126.
[5] 谢娟,戚秀真,郭迎,等.基于Green Shields 的单车道元胞自动机模型[J].公路交通科技(应用技术版),2013(8):261-264. XIE Juan, QI Xiuzhen, GUO Ying, et al. Cellular automaton model of single lane based on Green Shields[J].JournalofHighwayandTransportationResearchandDevelopment,2013(8):261-264.
[6] 彭川.基于元胞自动机的交叉口信号灯模型研究[D].南昌:华东交通大学,2013. PENG Chuan.ResearchonSignalLightofIntersectionBaseonCellularAutomaton[D]. Nanchang: East China Jiaotong University,2013.
[7] 闫晨.基于元胞自动机的十字交通路口交通流的研究与仿真[D].北京:北京交通大学,2013. YAN Chen.ResearchandSimulationonTrafficFlowofIntersectionusingCellularAutomaton[D]. Beijing: Beijing Jiaotong University,2013.
[8] 叶丽萍, 翁小雄, 刘芹. 结合改进跟驰模型的交通流元胞自动机模型[J]. 公路交通科技,2014,31(7):115-120. YE Liping, WENG Xiaoxiong, LIU Qin. Cellular automata model of traffic flow combined with improved car-following model[J].JournalofHighwayandTransportationResearchandDevelopment,2014,31(7):115-120.
[9] 魏丽英, 王志龙, 吴荣华. 交叉口进口道换道行为研究及建模[J]. 物理学报,2014,63(4):192-196. WEI Liying, WANG Zhilong, WU Ronghua. Research and modeling of the lane-changing behavior on the approach[J].ActaPhysicaSinica,2014,63(4):192-196.
[10] TIAN J F, JIA B, LI X G, et al. Synchronized traffic flow simulating with cellular automata model[J].PhysicaAStatisticalMechanics&ItsApplications,2009, 388(23):4827-4837.
[11] 花伟.基于元胞自动机模型的信号控制交叉口配时评估的研究[D]. 北京:北京交通大学,2006. HUA Wei.StudyofSignalControlIntersectionBasedontheCellularAutomatonModel[D]. Beijing: Beijing Jiaotong University,2006.
[12] 宇仁德, 石鹏, 刘芳. 交通元胞自动机计算机模拟模型的研究[J]. 计算机工程与应用,2008, 44(29):220-222. YU Rende, SHI Peng, LIU Fang. Research of simulation model on traffic cellular automation[J].ComputerEngineeringandApplications,2008,44(29):220-222.
Traffic Flow Model of Signalized Intersections Considering Effect of Brake Lights
PENG Yong1,YAN Guangcong1,JIANG Ruyan2,NIE Huadong1
(1. School of Traffic & Transportation, Chongqing Jiaotong University, Chongqing 400074, P.R.China; 2. Power Engineering Department, Yantai Engineering & Technology College, Yantai 264006, Shandong, P.R.China)
The front vehicle’s brake lights would influence the rear vehicle on the actual road. Based on the improved brake lights model, a cellular automaton model of signalized intersections was established, and the relationships among the traffic flow speed, the density, the queue length and the green time were studied. The proposed model was compared with the one without consideration of brake lights. The research shows that considering the effect of the brake lights or not, the relationships among traffic flow speed, the density, the queue length and green time are alike. However, the traffic flow of signal intersection is affected by the brake lights, so the effect of brake lights should be considered in the analysis on the variables of the signalized intersection traffic flow.
traffic and transportation engineering; traffic flow; signalized intersections; cellular automata; green time; the queue length
2015-09-07;
2015-12-18
彭 勇(1973—),男,重庆人,教授,博士,主要从事交通规划方面的研究。E-mail:pengyong@cquc.edu.cn。
闫广聪(1991—),男,山东莱芜人,硕士,主要从事交通规划方面的研究。E-mail:915243685@qq.com。
10.3969/j.issn.1674-0696.2016.06.19
U491.2
A
1674-0696(2016)06-091-04
