基于Prescan的换道预警规则研究
2016-05-25葛如海储亚婷谢永东
葛如海, 储亚婷,,谢永东,徐 明
(1.江苏大学 汽车与交通工程学院,江苏 镇江 212013;2.江苏联合职业技术学院 苏州建设交通分院,江苏 苏州 215100;3.上海干巷车镜实业有限公司,上海 201518)
基于Prescan的换道预警规则研究
葛如海1, 储亚婷1,2,谢永东2,徐 明3
(1.江苏大学 汽车与交通工程学院,江苏 镇江 212013;2.江苏联合职业技术学院 苏州建设交通分院,江苏 苏州 215100;3.上海干巷车镜实业有限公司,上海 201518)
对换道安全性进行研究,分析换道事故发生的主要原因。选取典型的换道场景,针对事故原因,进一步进行车辆运动学分析,建立出最小安全距离模型。综合考虑相对速度、相对纵向距离和评价指标TTC,提出符合实际的换道预警规则。运用Prescan和MATLAB/Simulink联合仿真,建立虚拟场景,进行验证。结果表明:提出的预警规则符合实际,具有实用价值和市场价值。
交通运输工程;Prescan;换道;预警规则;仿真
0 引 言
换道操作在车辆运行中是一种较为普遍的驾驶行为,然而,由于换道行为自身的复杂性,其同时涉及横向运动和纵向运动,又由于换道时周围环境的复杂,往往会引发交通事故。据统计,在我国,换道引发的事故每年约占总事故的4%~7%左右。虽然比例不高,但其中由于主观原因导致的约占75%[1]。因此,建立有效的换道辅助预警规则显得尤为重要。本车准备换道时,通过车载传感器(雷达、超声波或摄像头等)获取周围车辆的行驶信息,如速度、相对位移,将其传输给预先建立的预警规则预警分级后,及时反馈给驾驶员,可大大减少换道事故的发生。
国内外的专家学者,对换道预警进行了研究。HENG Wei[2]分析实车试验观测到的换道行为,从微观角度,建立了换道决策仿真模型;JEICH Mar[3]基于级联模糊推理系统,建立换道和跟车防撞系统;王荣本等[4]对换道场景进行分析,并选取最小安全距离作为安全换道的评价指标;付锐等[5]通过大量的实车试验,提出了本车在不同速度级别下与周围车辆的预警策略;陈秀锋等[6]对建立的最小安全距离模型进行仿真分析,界定安全区域与不安全区域;王江峰等[7]从换道需求和换道安全性分析,建立多车道、多车辆最小安全距离模型;毛锦[8]分析实际驾驶实验数据,对驾驶风格进行分类,提出个性化的针对不同驾驶人的换道预警策略。然而,上述文献都是从换道行为产生的源头和过程进行“正向”研究,制定预警规则或建立模型,其研究成果有一定的局限性。为此笔者从换道事故发生的原因出发,“逆向”分析,制定针对换道事故发生原因的预警规则,为下一步开发符合实际的换道预警系统奠定理论基础。
1 换道安全性分析
换道操作是一项较为复杂的操作,导致换道事故发生的因素也有很多种。然而,通常换道事故主要有以下两种情形[9]:本车进入目标车道时与目标车道内的车辆发生侧面碰撞;与目标车道内后方的接近车辆发生碰撞。针对以上两种情形进行分析,可知其发生的客观原因,后视镜盲区的存在,导致驾驶员视野受阻,无法看到正在目标车道的盲区内行驶的车辆;主观原因,驾驶员注意力不集中或经验不足,对于目标车道后方正在接近的车辆,无法准确判断其相对距离和速度。因此,要建立符合实际的换道辅助预警规则需考虑同时以上两种原因。
1.1 换道时车外盲区
主要讨论换道时,对侧后方区域的预警,故此处的“车外盲区”特指,由于车外后视镜而形成的视野盲区。此外,针对M1类汽车进行讨论。GB 15084—2006《机动车辆后视镜的性能和安装要求》[10]中对车外后视镜视野进行了规定,根据其规定可知,即使是安装有合格后视镜的车辆,车外两侧仍然存在盲区,如图1。
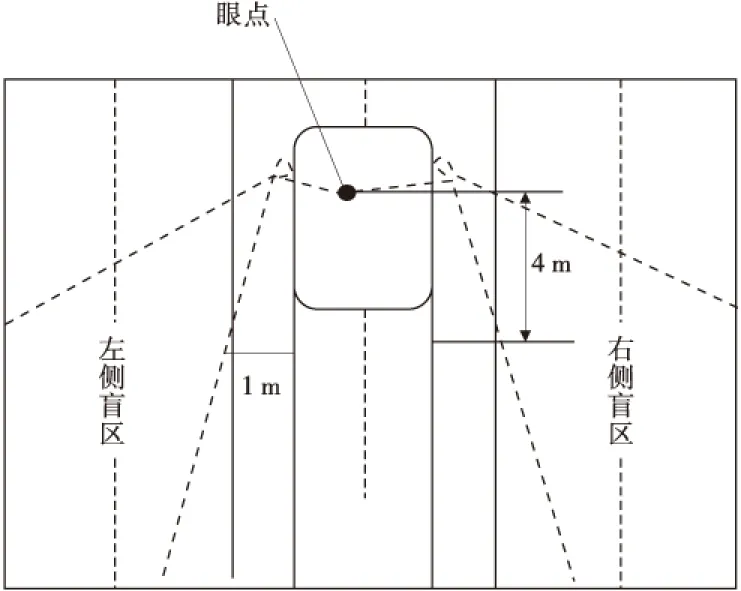
图1 车外后视镜两侧盲区示意Fig.1 Blind area schematic of the rearview mirror on both sides of vehicle
当有车辆在图1中左右两侧盲区内行驶时,此时驾驶换道存在安全隐患。文献[10]中规定,驾驶员眼点后20 m可看到水平路面4 m区域。而我国车道宽度一般为3.5 m,结合图1可知,眼点后20 m区域,距车外两侧边界>1 m区域为盲区。
1.2 换道时目标车道后车接近
研究表明,驾驶员换道意图的产生,主要是由于当前速度未达到其期望速度。此外,换道事故多发生在路况良好的直线道路上[9]。因此,选取双车道直线路段的车辆为研究对象,建立由低速车道向高速车道的二车道换道模型。完整的换道场景如图2,其中坐标系为世界坐标系,x轴沿道路水平方向,且与车道线重合,即纵向;y轴垂直于x轴,沿道路法线方向,即横向,M为换道车辆,即本车实施换道行为。车道1为本车所在车道即本车道。车道2为本车换道的目标车道。L0、F0为本车前后车辆,Ld、Fd为目标车道前后车辆。该场景下,M车为了达到期望速度,驾驶员一般会寻求合适的加速度从车道1换到车道2。定义t0时刻开始加速换道,tlat时刻加速换道结束,碰撞时刻为tC。

图2 换道场景Fig.2 Lane changing scenario
由上述换道事故发生原因分析可知,目标车道后方车辆Fd的接近对本车M的影响较大。因此,对换道场景进行简化,如图3。Fd与本车M位于相邻车道上,且M位于低速车道,Fd位于高速车道;Fd位于M车左侧后方;Fd匀速行驶。
换道过程中,Fd横向位置保持不变,当本车M按图示路径换道时,两车可能发生角碰、侧向刮擦和追尾,尤其是当Fd快速接近时。

图3 简化的换道场景Fig.3 Simplified lane changing scenario
2 预警规则的建立
2.1 碰撞模型
换道过程中,当两辆车的行驶轨迹在同一时间、同一空间相互接近时,将发生交通冲突,即碰撞。因此,建立合适的碰撞模型,研究两车在各自轨迹上从开始换道时刻到碰撞时刻的状态至关重要。碰撞模型主要是根据两车的相对速度和两车距离,就是选取两车的碰撞时间作为控制参数,这个也是预警规则的基础,以时间为主,距离为参考,两条线进行。
换道时,假设Fd车沿图3中轨迹1行驶,M车沿轨迹2行驶。其中轨迹1为水平直线,轨迹2选取7次多项式换道轨迹模型[11]。考虑两车的实际尺寸,当两车行驶至图3位置时,发生碰撞。设点C为碰撞点,研究开始换道时刻至碰撞时刻两车的运动关系,建立最小安全距离模型。
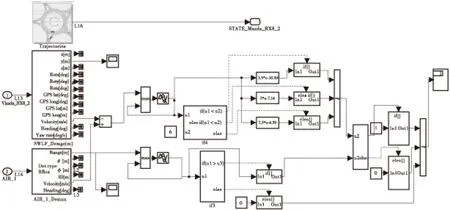
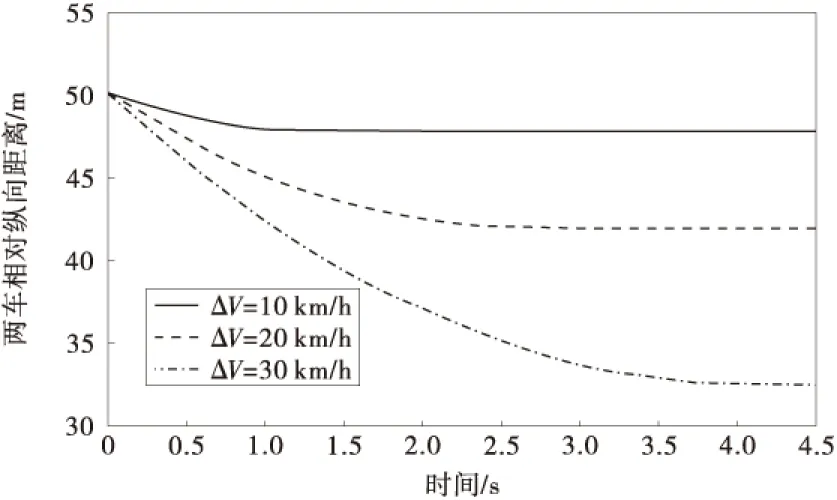
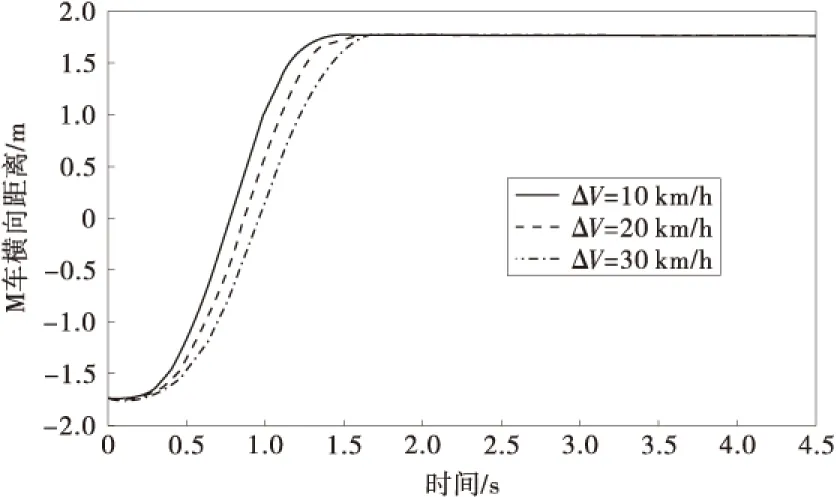
设M以恒定纵向加速度aM行驶,考虑驾驶的舒适性[1],0 m/s2 S0+LM+SM≥SFd+LMcosθ+Wsinθ (1) 式中:S0为开始换道时,M车与Fd车的初始纵向相对距离;SM、SFd分别为M车、Fd车从开始换道至换道过程中某一时刻行驶的纵向距离,LM为M车的长度,W为M车的宽度,θ为换道时的纵向角度,一般取5°。 式(1)可改写为: S0≥SFd-SM-LM+LMcosθ+Wsinθ=VFdt-VM(0)t-LM-0.5aMt2+LMcosθ+Wsinθ,t∈(t0,tlat) (2) 因此,换道时,S0只需满足式(2),在换道过程中可避免事故的发生,即只需: Min(S0)=Max[VFdt-VM(0)t-LM-0.5aMt2+LMcosθ+Wsinθ] 式中:Min(S0)为恰巧碰撞时对应的初始纵向相对距离,即为保证换道时不发生碰撞所对应的最小安全距离,有: (3) 式中:ΔV=VFd-VM(0),为Fd和M的初始相对速度。由式(3)可知,保证在换道过程中不发生碰撞的最小安全距离与换道时两车相对速度、碰撞时间和换道加速度有关。 2.2 最小跟车安全距离模型 实际换道过程中,若仅以上述碰撞模型推导的最小安全距离为依据,即以换道后M车与Fd车间的距离是否﹥0作判断,会给实际驾驶带来危险。事实上,应在换道后,为两车预留出一定的跟车安全距离。文中换到目标车道后,由于两车以较小的相对速度跟随行驶,后车与前方车辆间的距离与后车速度呈线性关系[1],为此,建立跟车安全距离模型: Min(S1)=VFdtd+D0 (4) 式中:Min(S1)为最小跟车安全距离;td为Fd车的制动迟滞时间,一般取1.2~2 s;D0为Fd车完全停下来的心理安全距离,一般取2~5 m。 综合不发生碰撞所建立的最小安全距离模型和最小跟车安全距离模型,得到安全换道所需的最小换道安全距离模型: Min(S)=Min(S0)+Min(S1) (5) 2.3 预警规则 根据上述对换道事故原因的分析及碰撞模型的分析可知,除了碰撞时刻tC和两车初始纵向距离S0,两车初始相对速度ΔV也是重要的特征指标。笔者引入不同的TTC(Time to collision)作为不同ΔV下的评价指标。TTC为若两车按照当前状态继续行驶,所需的碰撞时间。研究表明[9],当ΔV≤10 km/h时,驾驶员在换道时容易感到满足,当ΔV>22 km/h时,容易发生角碰或侧碰。因此,选取ΔV=10 km/h和22 km/h作为相对速度的划分等级。参照ISO标准[12]中ΔV和TTC值对应关系,给出表1。随着ΔV增大,TTC的取值应增大。这是因为,在设计实际的预警系统时,考虑到ΔV越大,后车接近的速度越快。为了避免碰撞,预警规则需预留出越多的时间,提前预警。 表1 换道预警评价指标TTC与相对速度对应关系 此外,由于车外后视镜两侧盲区靠近呈发散的区域,有文献[9]指出,车后方3 m内区域为最危险区域。 综合考虑S0,TTC,ΔV,结合表1和式(3)提出符合实际的换道预警规则。文献[9]指出,车后方3 m内区域为最危险区域。 1)当两车的纵向初始相对距离S0≤3 m时,盲区内有车辆,此时换道极为危险,应预警; 2)当两车的纵向初始相对距离S0>3 m时,按式(3)预警。若两车相对速度ΔV>22,则Fd快速接近M,此时换道安全隐患较大。选取S0≥Min(S)|t=3.5,安全;否则,应预警。若10<ΔV≤22,S≥Min(S)|t=3安全;否则,应预警。若ΔV≤10,Fd缓慢接近M,相对较安全,选取TTC=2.5 s为评价指标。S≥Min(S)|t=2.5,安全;否则,应预警。 验证上述预警规则,不仅要考虑试验的真实性、有效性,还需考虑试验成本,安全性等问题,为了避免实车试验的危险性与高成本,选用主动安全软件Prescan和MATLAB/Simulink联合仿真。由TNO公司开发的Prescan软件可提供一个可视的交通仿真平台,在其GUI界面中,可快速建立所需的交通场景。其中包括建立各种形式曲率的路段、实施动作的对象(车辆或行人)、能探测周围环境的各种传感器和基础设施(交通指示牌、建筑)等。此外,具备与其它软件良好连接的端口(如MATLAB、Carsim),且自带车辆的动力特性。 在Prescan中建立双车道换道场景,如图4。建立长200 m,宽度3.5 m的直线路段,选用Mazda KX8为研究对象,LM=4.5 m,W=1.86 m;Fd按预设的速度匀速行驶;M沿软件中自带的换道轨迹,按预设加速度换道;在M车左后保险杠位置建立传感器模型,以探测与目标车道车辆间的相对速度和位移;运行Prescan中建立的虚拟换道场景后,两车的运动状态,传感器探测到的数据通过端口传输到MATLAB/Simulink中。在Simulink中,进一步完成仿真的核心内容。以传感器探测的数据作为输入,按上述预警规则建立预警模型。如图5。 图4 Prescan双车道换道虚拟场景Fig.4 Virtual scenario of dual-lane lane changing based on Prescan 图5 辅助换道预警规则Fig.5 Warning rule of auxiliary lane change 为了验证笔者提出的预警规则,首先对后方车辆快速接近的情况进行验证。由于换道时M车速度一般不会低于40 km/h[5],且行驶速度越快,留给驾驶员的反应时间越短,因此换道事故最多发生在中高速行驶的车辆上[9]。笔者研究VFd=108 km/h,S0=50 m,aM=2 m/s2时,ΔV=10,20,30 km/h时的换道预警情况。假设预警输出为1,安全输出为0。联合仿真后,可得到不同ΔV下,M车与Fd车的相对纵向距离变化曲线(图6)以及M车的横向位移变化曲线(图7)。同时,Simulink中的Display模块输出按笔者提出的规则预警后的状态。仿真结果显示,ΔV=10,20 km/h时,输出1,即安全状态,无须预警;ΔV=30 km/h时,输出0,即危险状态,需预警。 图6 不同ΔV下,M车与Fd车的相对纵向距离变化曲线Fig.6 Change curve of relative longitudinal distance between vehicle M and Fd with different ΔV 图7 不同ΔV下,M车横向距离变化曲线Fig.7 Change curve of lateral distance of vehicle M with different ΔV 仿真模型中选取相同的VFd,因此有相同的最小跟车安全距离S=VFdtd+D0=30×1.2+2.5=38.5 m。对比分析模拟真实换道获得的曲线图可知,ΔV=10 km/h时,若从当前状态换道,M车1.5 s时完全换到目标车道,之后与Fd车保持47.8 m的跟车距离,大于最小跟车安全距离。因此,当前状态换道是安全的,与经过预警规则得出的预警状态一致。ΔV=20 km/h时,若从当前状态换道,M车在1.7 s时完全换到目标车道,之后与Fd车保持41.9 m的跟车距离,大于最小跟车安全距离。因此,当前状态换道是安全的,与预警规则得出结果一致。ΔV=30 km/h时,若从当前状态换道,M车在1.9 s时完全换到目标车道,之后与Fd车保持32.4 m的跟车距离。即使M车在安全时间内换到目标车道,但因跟车距离不满足最小安全跟车距离,因此,当前状态换道仍是危险的,与预警规则得出结果一致。此外,由仿真图可知,当初始相对距离S0,VFd,aM均相同时,ΔV越大,M车换道越危险,符合预警规则中TTC的选取,ΔV越大,TTC越大。 为了进一步验证当车辆行驶在盲区界限内时的预警情况与实际是否相符,选取上述ΔV=10km/h 时的场景,研究当S0由50 m变为3 m时,若以当前状态换道是否安全。图8为两车相对纵向距离曲线。由图可知,两车在tC=1.35 s时发生碰撞,即位于盲区内的车辆Fd即使缓慢接近M车,若M车在此时换道,也很容易发生碰撞,符合笔者建立的预警规则。 图8 S0=3 m,ΔV=10 km/h时,M车与Fd间相对距离变化曲线Fig.8 Change curve of the relative distance between vehicle M and Fd when S0=3m, ΔV=10 km/h 以换道事故发生的主要原因作为预警决策依据,建立预警规则。从换道时车外盲区和目标车道后车接近两个方面进行研究,对初始相对距离进行分段预警。盲区内,一旦检测到车辆便发出警告;盲区外,依据建立的最小安全距离模型,对不同ΔV级别下的车辆,设定不同的TTC值。仿真结果分析表明,依据实际换道事故原因建立的预警规则,有很大的实际价值。该预警规则的建立,为实车用换道预警系统的建立奠定了基础。 [1] 金立生,Bart van Arem,杨双宾,等.高速公路汽车辅助安全换道模型[J].吉林大学学报(工学版),2009,39(3):582-586. JIN Lisheng,BART van Arem,YANG Shuangbin,et al.Safety lane change model of vehicle assistant driving on highway [J].JournalofJilinUniversity(EngineeringandTechnology),2009,39(3):582-586. [2] HENG Wei,ERIC Meyer,JOE Lee,et al.Characterizing and modeling observed lane-changing behavior [J].TransportationResearchRecord1710,2013,00-1651:104-113. [3] JEICH Mar,LIN Hungta.The car-following and lane-changing collision prevention system based on the cascaded fuzzy inference system [J].InstituteofElectricalandElectronicsEngineers,2005,54(3):910-924. [4] 王荣本,游锋,崔高健,等.车辆安全换道分析[J].吉林大学学报(工学版),2005,35(2):179-182. WANG Rongben,YOU Feng,CUI Gaojian,et al.Analysis on lane-changing safety of vehicle [J].JournalofJilinUniversity(EngineeringandTechnology),2005,35(2):179-182. [5] 付锐,郭应时,袁伟,等.基于实车试验数据的换道预警规则[J].吉林大学学报(工学版),2013,43:110-120. FU Rui,GUO Yingshi,YUAN Wei,et al.Lane change warning rules based on real vehicle-test data [J].JournalofJilinUniversity(EngineeringandTechnology),2013,43:110-120. [6] 陈秀锋,杨万三,曲大义.基于最小安全距离的车辆换道安全研究[J].昆明理工大学学报(自然科学版),2013,38(3):42-46. CHEN Xiufeng,YANG Wansan,QU Dayi.Research on lane-changing safety of vehicle based on minimum safety spacing [J].JournalofKunmingUniversityofScienceandTechnology(NaturalScience),2013,38(3):42-46. [7] 王江锋,邵春福,闫学东,等.基于虚拟现实的车辆换道最小安全距离研究[J].公路交通科技,2010,27(8):109-113. WANG Jiangfeng,SHAO Chunfu,YAN Xuedong,et al.Research on minimum safety distance of lane changing based on virtual reality [J].JournalofHighwayandTransportationResearchandDevelopment,2010,27(8):109-113. [8] 毛锦.考虑驾驶风格的换道预警方法[D].西安:长安大学,2012. MAO Jin.TheWayofLaneChangeWarningConsideredDriverStyle[D].Xi’an:Chang’an University,2012. [9] VISVIKIS C,SMITH T L,PITCHER M,et al.StudyonLaneDepartureWarningandLaneChangeAssistantSystems[R].UK:Transport Research Laboratory,2008. [10] 中华人民共和国国家质量监督检疫总局,中国国家标准化管理委员会.机动车辆后视镜的性能和安装要求:GB 15084—2006 [S].北京:中国标准出版社,2007. The General Administration of Quality Supervision and Quarantine of the People’s Republic of China,the China National Standardization Management Committee.ThePerformanceandinStallationRequirementsoftheMotorVehicleRearviewmirror: GB 15084—2006[S].Beijing:Standards Press of China,2007. [11] 王畅,付锐,郭应时,等.换道预警系统中越线时间的预测方法[J].汽车工程,2014,36(4):509-514. WANG Chang,Fu Rui,Guo Yingshi,et al.Prediction method of time-to-line-crossing in lane change warning system [J].AutomotiveEngineering,2014,36(4):509-514. [12] Technical Committee ISO/TC 204,Intelligent Transport Systems.AssistantSystemofRouteChangeDecisioninIntelligentTransportationSystem[S].London:British Standards Institution,2008. Warning Rules of Lane Change Based on Prescan Simulation GE Ruhai1, CHU Yating1, 2, XIE Yongdong2, XU Ming3 (1.School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, Jiangsu ,P.R.China; 2. Suzhou Institute of Construction & Transportation, Jiangsu Union Technical Institute, Suzhou 215100, Jiangsu,P.R.China; 3. Shanghai Ganxiang Automobile Mirror Industry Co., Ltd., Shanghai 201518,P.R.China) The main cause of lane change accident was analyzed during the study of the security of lane change. In the typical lane change scenario, a minimum safe distance (MSS) model was established on the basis of the main cause of accident and the vehicle kinematical analysis. With the comprehensive consideration of the relative speed, the relative longitudinal distance and the evaluation indexTTC(Time to collision), the realistic lane change warning rule was proposed. A virtual lane changing scenario was developed by the united simulation of MATLAB/Simulink and Prescan to verify the warning rule. The results show that the proposed warning rule accords with reality, and has practical value and market value. traffic and transportation engineering; Prescan; lane change; warning rule; simulation 2014-09-22; 2014-11-18 葛如海(1957—),男,江苏如皋人,教授,博士生导师,主要从事汽车主被动安全方面的研究工作。E-mail:grh@ujs.edu.cn。 10.3969/j.issn.1674-0696.2016.01.33 U491.2 A 1674-0696(2016)01-172-05
3 仿真分析


4 结 语
