基于电流估计的永磁同步电机矢量控制
2016-05-25杨振强吴梦杰
张 信,杨振强,吴梦杰
(1.大连理工大学,大连 116024;2.东北大学设计研究院(有限公司),沈阳 110013)
基于电流估计的永磁同步电机矢量控制
张 信1,杨振强1,吴梦杰2
(1.大连理工大学,大连 116024;2.东北大学设计研究院(有限公司),沈阳 110013)
典型的表贴式永磁同步电机(SPMSM)矢量控制结构中需要一个位置传感器和两个相电流传感器,一旦相电流传感器失效,则整个系统都无法工作。为了提高驱动系统的安全性和经济性,目前常用单电流传感器来重建相电流的方式存在测量盲区,需要复杂的算法来补偿,且母线电流传感器的引入会带来额外的噪声。因此,提出一种SPMSM无电流传感器控制方式,通过自适应反推式观测器估计d-q轴电流和定子电阻,用李雅普诺夫稳定性定理分析了观测器的稳定性和收敛性,分别对有无电流传感器控制进行仿真比较,结果表明该无电流传感器驱动系统电流响应和速度响应都达到了预期的目标,动态性能好,鲁棒性强。
表贴式永磁同步电机;自适应反推式观测器;无电流传感器;矢量控制
0 引 言
近年来,永磁同步电动机在工业生产、国防以及日常生活中应用越来越广泛。与感应电动机和直流电动机相比较,永磁同步电动机具有效率高、转矩电流比高、结构紧凑、机械结构简单和易于维护等优点[1-2]。然而,很多应用场合如数控机床、机器人、电动车对永磁同步电动机控制性能要求越来越高,同时,要求驱动系统简单经济,安全可靠。
常规的表贴式永磁同步电动机(以下简称SPMSM)驱动系统有一个位置传感器和两个电流传感器(无中线情况下),多个物理传感器的引入使系统的安全性和稳定性降低,且增加了成本和系统的复杂性。但是在SPMSM转子速度趋于零或者很低的情况下,无位置传感器很难精确控制电机的速度,同时如果多个电流传感器的输出特性不匹配会限制系统的控制性能,如电流传感器测量偏移、传感器增益不同引起转矩脉动。
因此,为了使表贴式永磁驱动系统更加简洁化、经济化、安全化,减少电流传感器成为研究的热点。目前大多数研究主要集中在使用单直流母线电流传感器,根据母线电流和相电流之间的关系来重建电机的三相电流,如文献[3-5]这种单直流母线电流传感器控制技术利用逆变器六个有效开关状态来检测电流,而在两个非有效开关状态(000和111)是不可测量或者测量不可靠的,此外如果有效开关状态作用时间太短,测量值也是不可靠的。文献[6-7]提出了对基于直流母线电流传感器进行相电流重建中的不可测区域进行补偿的方法,尽管这些方法获得了良好的电流重建性能,但是算法比较复杂且直流母线传感器的引入噪声问题无法改善。因此,本文提出了一种新的基于电流估计的SPMSM的无电流传感器控制方式。根据反推技术具有良好的非线性系统参数估计性能及其控制灵活,并结合扩展自适应控制,提出一种新的自适应反推观测器来估计SPMSM的d-q轴电流,实现定子电流估计,为减少电机参数变化对估计效果的影响,提出一种在线偏差补偿方式,同上述方式相比,这种算法简单经济、鲁棒性好,且易于实施。
1 新型反推式自适应观测器原理
1.1 SPMSM动态模型
三相SPMSM基于的d-q旋转坐标系的模型如下:
(1)
式中:p为微分算子;Lq,Ld分别为d,q轴定子电感;uq,ud为d,q轴定子电压;ψm为永磁磁链;p为极对数;ωr为转子机械速度。
转矩方程由式(2)表示:
(2)
机械方程:
(3)
式中:Te,Tl分别为电磁转矩和负载转矩;J为转动惯量;Tf为摩擦转矩;Bm为粘滞摩擦系数。
1.2 反推自适应观测器
当定子电流传感器不能有效检测相电流时,防止电驱动系统瘫痪而造成经济损失,将反推自适应观测器应用到SPMSM驱动系统的电流重建中,这种观测器的基本思想是通过将已知的状态变量来设计估计器,控制灵活且不要求系统为线性。对于d-q轴电流和定子电阻估计,可以将转子速度和电流环调节器输出电压作为已知量来设计观测器,通过估计转子速度和实际速度的偏差,确保偏差收敛于0,从而来估计未知量定子电流和电阻,为减少噪声,对速度估计设计一阶低通滤波。
由SPMSM的特点:Rd=Rq=r,Ld=Lq=l。
代入式(1)可得定子电流和电阻及速度的估计方程如下:
(4)
(5)
为确保定子电流和电阻的估计值能够收敛且跟踪输入变化,下面根据李雅普诺夫稳定性定理来设计观测器自适应控制律。分别定义转子速度和定子电流的估计误差如下:
(6)
式(5)减去式(3)可得速度估计误差的动态方程表达式:
(7)
为使速度估计误差能够收敛,定义李雅普诺夫函数:
(8)
将式(8)对eω求导,并将式(7)代入下式:
(9)
(10)
式中:k1是一个值为正数的系数。由式(10)可以解出q轴定子电流偏差:
(11)
它是保证速度估计能够跟踪实际速度的一个充分条件。
同理,为保证定子电流和电阻的估计值能够跟踪实际值变化,可以选取李雅普诺夫函数:
(12)

根据定子电流和电阻估计误差的定义,将式(4)减去式(1):
(13)
由式(12)和式(13)可得出:
(14)
(15)
(16)

(17)

(18)
由于本文设计的反推式自适应控制器对定子电流和电阻的估计实质是根据速度估计偏差来控制的,所以速度估计的精度直接影响观测器的控制性能。为了减少估计误差和噪声,改善动态性能,采用一阶低通滤波器对速度估计进行滤波处理,该滤波器的传递函数:
(19)
式中:k是值为正数的常数。
将转子的速度和电流环控制器输出电压作为输入量,定子电阻和电流作为观测器输出,反推自适应观测器的结构框图如图1所示。

图1 反推自适应观测器方框图
1.3 偏差补偿
由式(4)可知,定子电流估计高度依赖电机模型的参数,运行过程中参数的变化直接影响控制性能,为减小电机参数变化对电流估计的影响,本文提出一种新的偏差补偿方式。
将电机模型式(1)中的带转子机械速度ωr的项分离出来,作为旋转电动势:
(20)
式中:uqω,udω分别为d,q轴的旋转电动势。
在实际应用中式(20)的电流采用参考值,旋转电动势的估计效果会比较好,故式(20)可写成:
(21)
由式(4)可知,反推式自适应观测器估计时旋转电动势实际用下式进行估算:
(22)

(23)
由前面的叙述易证明Δuqω,Δudω是收敛的。
将式(23)作为电流环调节器输出的补偿,以减少参数变化对电机控制性能带来的影响。其中电流环控制器采用常规的PI控制器。
2 反推自适应观测器仿真研究
为了检验反推式自适应观测器的定子电流估计性能,在MATLAB/Simulink平台上搭建无电流传感器的SVPWM控制系统和有电流传感器矢量控制模型进行仿真,控制一台三对极SPMSM,逆变器选取常用的三相一级拓扑结构,并将两者的仿真结果进行比较,SPMSM仿真参数如表1所示。

表1 仿真电机参数
SPMSM无电流传感器SVPWM控制系统方框图如图2所示。

图2 SPMSM无电流传感器SVPWM控制框图
为了便于实现数字化,将式(1)中的SPMSM模型进行离散化,得到下一采样周期的电流表达式:
(24)

观测器的其他参数选取如表2所示。

表2 观测器仿真参数
图3为速度给定n*=500 r/min,负载转矩Tl=1 N·m时,无电流传感器控制系统定子电流估计波形。
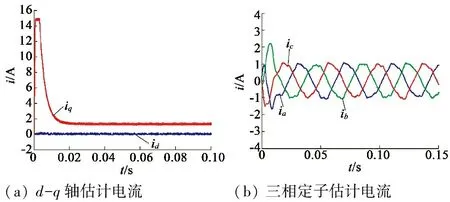
(a)d-q轴估计电流(b)三相定子估计电流
图3 无电流传感器定子电流估计波形
由图3可以看出,反推自适应估计器三相定子电流的估计波形比较平滑,响应比较快,且谐波成分少。
图4为有电流传感器和无电流传感器对应的转矩响应波形比较。

图4 转矩响应比较波形
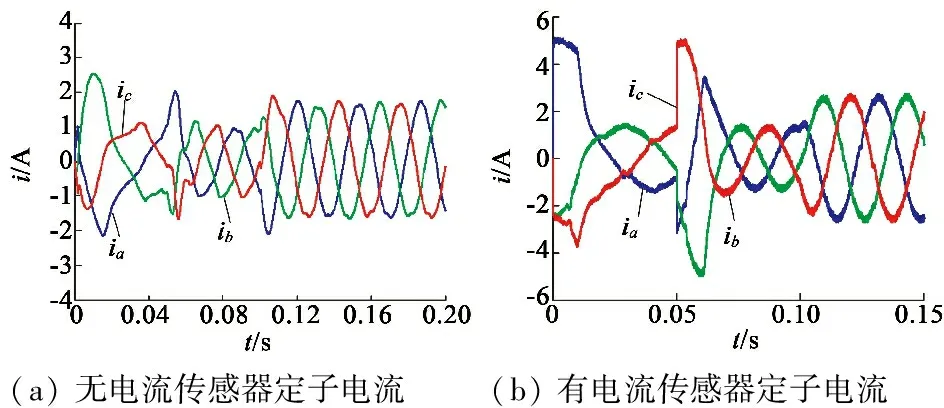
当转子速度发生变化时,两种情况下的电流和速度响应波形分别如图5、图6所示,在t=0.05 s时由原来的n*=300 r/min变到n*=600 r/min。
当负载转矩发生变化时,两种情况下的转矩响应波形如图7所示,在t=0.1s时由原来的Tl=1N·m变到Tl=8 N·m。
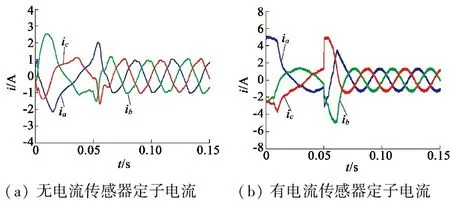
(a)无电流传感器定子电流(b)有电流传感器定子电流
图5 三相定子电流比较
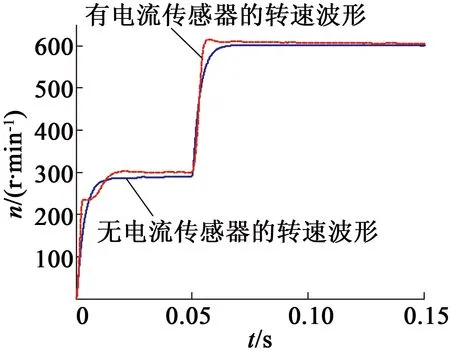
图6 转速响应比较

图7 转矩响应比较
为了进一步证明无电流传感器矢量控制的鲁棒性及定子电阻估计的有效性,图8和图9为当t=0.05 s时,转速由原来的n*=300 r/min变成n*=600r/min,而在t=0.1s时,转矩由原来的Tl=1N·m变成Tl=8 N·m并且在t=0.15 s时将定子电阻由原来的r=2.8 Ω变成r=4 Ω时定子电流变化波形和转速比较波形。
(a)无电流传感器定子电流(b)有电流传感器定子电流
图8 电流比较仿真结果
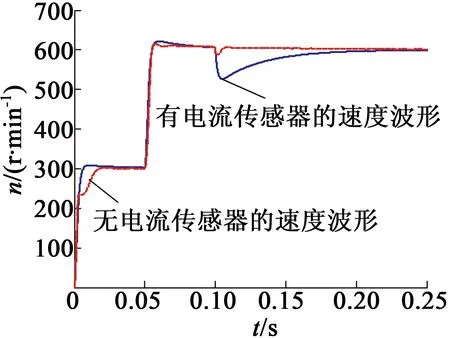
图9 转速比较仿真结果
分析两种情况下的动态仿真结果可以得出如下结论:
(1)从图3、图4可以看出,基于反推自适应观测器的无电流传感器SVPWM控制性能几乎与有电流传感器的SPMSM的SVPWM控制性能一样,估计电流能够很快地跟踪电流传感器测量值,并且稳态误差很小,且电流估计波形中谐波成分少。
(2)当转速发生变化时,从图5、图6可以看出,无电流传感器控制系统能够快速精确地跟踪参考速度变化,可靠性高。
(3)当负载转矩发生变化时,从图7到图9可以看出,无电流传感控制系统电磁转矩可以快速跟踪负载转矩变化,与有电流传感器控制系统比较,静态误差更小,转速抵抗负载转矩干扰能力更强。
3 结 语
本文提出一种新颖的反推式自适应观测器,将电流环控制器输出、转子速度作为输入量,d-q轴电流及定子电阻作为输出,实现在无电流传感器的情况下估计三相SPMSM的定子电流和电阻,同时取消了直流母线电压传感器,利用估计速度与实际检测速度的偏差控制来在线实时调节估计电流和定子电阻,为进一步提高观测器的可靠性和实时性,设计低通滤波器来滤除估计速度中的谐波分量,为降低电机模型参数变化对估计电流的影响,设计旋转电动势偏差补偿。将该观测器运用到永磁同步电动机矢量控制系统中,实现无电流传感器的SPMSM矢量控制。为验证其性能,同时搭建有电流传感器的SPMSM的SVPWM控制系统,通过仿真对两者进行比较。该算法相对比较简单且易于实施,仿真结果证明在驱动系统的负载转矩、转速、定子电阻发生变化时,动态响应快,鲁棒性好,控制灵活且经济高效。
[1] OHISHI K,MIYAZAKI T,NAKAMURA Y.High performance ultra-low speed servo system on doubly coprime factorization and instantaneous speed observer[J].IEEE Transactions on Mechatronics,1996,1(1):89-98.
[2] OHISHI K,NAKAMURA Y.Robust self-tuning speed servo system for wide speed range based on instantaneous speed observer and disturbance observer[C]//IEEE IAS Annual Meeting.IEEE,1996:339-346.
[3] HA J-I.Current prediction in vector-controlled PWM inverters using single DC-link current sensor[J].IEEE Transactions on Industrial Electronics,2010,57(2):716-725.
[4] CHO Y,LABELLA T,LAI J S.A three-phase current reconstruction strategy with online current offset compensation using a single current sensor[J].IEEE Transactions on Industrial Electronics,2012,59(7):2924-2933.
[5] BOYS J T.Novel current sensor for PWM AC-drives[J].IEE Proceedings:Electric Power Applications,1988,135(1):27-32.
[6] YANG S-C.Saliency-based position estimation of permanent-magnet synchronous machines with a single current sensor[J].IEEE Transactions on Industry Applications,2015,51(2):1561-1571.
[7] KIM K-S,YEOM H-B,KU H-K,et al.Current reconstruction method with single DC-link current sensor based on the PWM inverter and AC motor [C]//IEEE Energy Conversion Congress & Exposition.IEEE,2014:250-256.
Vector Control of PMSM Based on the Current Estimate
ZHANGXin1,YANGZhen-qiang1,WUMeng-jie2
(1.Dalian University of Technology,Dalian 116024,China;2.Northeastern University Engineering & Research Institute Co., Ltd.,Shenyang 110013,China)
The typical vector control structure of surface-mounted permanent magnet synchronous motor requires a position sensor and two-phase current sensors. However, once the phase current sensor fails, the whole system does not work. In order to improve the security and stability of the system, many studies have done to get the phase current reconstruct through a single dc-link voltage sensor. But there are unpredictable areas for which need some complex algorithms to compensate, in addition to the introduction of the DC link current sensor will bring additional noise. Therefore, a current sensorless control scheme for a SPMSM was proposesd based on the adaptive backstepping observer, which can estimate the current ofdq-axis and the stator resistance. Convergence and stability of the observer were analytically verified based on Lyapunov stability theory. When compared with three current sensors control system under different operating conditions, the current sensorless control system shows a excellent tracking and dynamic performance.
surface-mounted permanent magnet synchronous motor (PMSM); adaptive backstepping observer; current sensorless; vector control
2016-01-10
TM341;TM351
A
1004-7018(2016)05-0052-04
张信(1989-),女,硕士研究生,研究方向为永磁同步电机、开关磁阻电机控制。
