变速变桨风电机组阵风控制策略
2016-05-22娄尧林叶杭冶吴晨曦
娄尧林 ,叶杭冶 ,蔡 旭 ,吴晨曦
(1.上海交通大学 电子信息与电气工程学院 风力发电研究中心,上海 200240;2.浙江运达风电股份有限公司 风力发电系统国家重点实验室,浙江 杭州 310012;3.上海交通大学 船舶海洋与建筑工程学院 海洋工程国家重点实验室,上海 200240;4.杭州电子科技大学 自动化学院,浙江 杭州 310018)
0 引言
风电机组在阵风工况下,大面积脱网造成了较为严重的安全问题,给所连接电网带来了冲击。例如2005年1月,发生在丹麦境内的一个从西海岸到东海岸的大范围阵风,当时最高风速达到20~25m/s,导致了近4000台风电机组的停机,对电网造成了不小的冲击[1]。阵风是风速与风向在短时间内均发生较大变化的工况,此时风电机组会触发超速保护动作而脱网。大风情况下的超速脱网不仅会增加风电机组机械疲劳载荷,影响机组使用寿命,而且在大风情况下的停机到再次并网运行,受到机组二次并网风速的约束,需要一段时间,这样也会减少风电机组的发电量。因此研究阵风控制策略,抑制或者减少风电机组超速脱网,对于提高风电场发电量、降低风电机组机械载荷、提高电网稳定性有很大的意义。
随着低风速、超低风速风电机组的开发,机组风轮直径不断增大。据统计,1.5 MW机组的风轮直径从 70 m发展到97 m,2.0 MW 机组的风轮直径从103 m发展到121 m[2],机组风轮的惯性增加了近2倍。由于风轮的巨大惯性,通常在阵风出现1~2 s后,风轮转速才发生变化,滞后系统容易引起飞车[3]。机组发生风轮超速的另外一个因素是,由于桨叶气动的非线性特点,单一控制器或单一增益的控制器已不能满足控制性能要求,通常做法是根据桨距角[4-5]或者风速[6]来设计增益调节的变桨控制参数,桨距角或风速越大,则增益越小,这样虽然避免了桨距角的调节时间过长,但在阵风工况下,风速急剧上升时,桨距角动作比较缓慢,风轮惯性较大,风轮容易发生超速。
已有文献对抑制风轮超速进行了研究,文献[7]简化了传动链模型及尾流模型,基于静态的功率-风速关系,预估出风轮有效风速作为控制器的前馈信号,进行提前变桨动作,但没有考虑偏航误差、风轮与塔架的动态特性;文献[8]基于测量桨叶根部挥舞与摆振方向的弯矩,通过非线性观测器,预估出有效风速及入流角,并在此基础上识别极限事件模式,来进行快速变桨,有效降低了风轮转速。但在目前运行的风电机组中,在桨叶根部贴应变片并不常见。文献[9-10]基于安装在机舱上的雷达测风仪,检测到风轮前的风速,处理后引入作为控制器的前馈信号,有效地降低了机组的载荷,同时也有效抑制了风轮超速问题,但雷达测风仪目前还处于试验阶段,成本较高,不适合工程批量应用。
本文提出的阵风控制策略,本着在阵风工况下,变桨提前动作与快速动作的原则,结合变速变桨控制算法基本结构,在变桨控制器PC(Pitch Controller)上增加功率桨距角发电机转速控制环PPGSL(Power Pitch Generator Speed Loop),使变桨在额定功率以前提前动作;在变桨比例项中增加非线性增益因子NLGF(NonLinear Gain Factor),使得变桨能够快速动作,从而有效抑制在阵风工况下风轮转速超调。通过对一个低风速大叶轮的2.0 MW机组在额定风速附近与额定风速以上阵风工况的仿真分析,及控制策略的现场验证,表明该阵风控制策略能有效抑制风轮超速,减少由于停机带来的发电量损失,而又不增加机组疲劳载荷。
1 风电机组风轮超速机理分析
1.1 风电机组控制器基本原理
风电机组控制器由转矩控制器TC(Torque Controller)与PC两部分组成,如图1所示。图中,ωrate为额定发电机转速;βref为桨距角给定;βmax-min为最大与最小桨距角限制值;Prate为风电机组额定功率;ωset为发电机设定转速;ωg为当前发电机转速;Tg为比例积分 PI(Proportional Integral)控制器输出的发电机给定转矩;Tmax-min为最大与最小转矩限制值。

图1 转矩控制与变桨控制基本原理框图Fig.1 Schematic diagram of torque control and pitch control
TC的作用是发电机转速调节,转矩-转速的控制轨迹通常如图2所示,其中AB为直线,BC为二次曲线,CE为直线,DEF为反比例曲线。图中,ωmin为最小发电机转速,Trate为额定发电机转矩,kopt为最优模态增益系数。在额定风速以下,即在图2的E点以前,进行最大功率点跟踪控制,在额定风速以上,进行恒功率控制[11-13]。TC通常以发电机转速差作为控制输入、发电机给定转矩作为输出的PI控制器来实现。PI控制器输出,即发电机给定转矩需根据当前发电机转速设定上限值与下限值,从而实现最大风能捕获与恒功率控制。在恒功率控制阶段,可以通过在基本转矩的基础上,加上纹波转矩,以抑制传动链扭振,减少传动链疲劳载荷[14]。
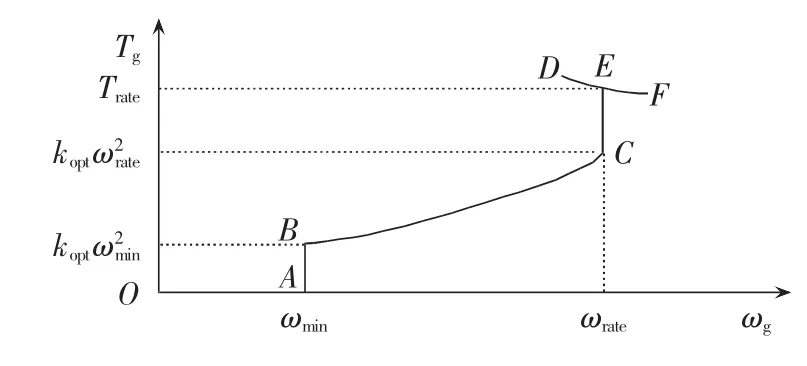
图2 变速变桨风电机组转矩-转速图Fig.2 Curve of torque vs.speed for variable speed variable pitch wind turbine
PC在额定风速以上起作用,其目的也是调节发电机转速。PC通常设计为以发电机转速差作为输入[15]、桨距角作为输出的 PI控制器[16-17]。 由于桨叶气动的非线性特点,PC的比例系数与积分时间常数是变增益的,可以根据预先设定的桨距角与其对应关系获得[18]。
由于TC和PC都能控制转速在同一个设定点,所以2个控制器需进行解耦控制,满足以下要求:当转矩在额定点以下时给定的桨距角要保持在最优桨距角βfine;当桨距角大于最优桨距角时,给定转矩要维持在额定转矩。
1.2 阵风工况下机组超速情况分析
当机组在额定风速以下(如低于额定风速1m/s)运行,遭遇了阵风,风电机组的发电机转速容易超过1.1倍的保护限值[19],导致机组超速停机。这时为了防止在功率未达到额定功率而变桨动作导致功率损失,往往把TC过渡到PC的条件设计为发电机转速超过额定转速而且机组的功率达到额定值。因此在风速迅速上升的工况下,发电机转速急剧上升,但功率没有达到额定值,如图2的E点之前,变桨没有动作。但当功率达到额定值时,转速已经很高,此时开始变桨,已不能及时有效地抑制发电机超速。
当机组在额定风速以上运行时,风电机组运行在PC阶段,一是由于风轮的巨大惯性,从阵风发生到发电机转速变化有1 s左右的滞后,二是由于桨叶气动的非线性特点,在设计PC时,桨叶角度越大,控制器的增益越小,这就导致风速急剧上升的情况下,桨叶回调速率比较慢,不能很好地抑制风轮超速。
2 抑制阵风的控制策略
针对额定风速以下与额定风速以上2种阵风超速的情况,结合变速变桨控制算法基本结构,设计了阵风控制策略:在PC上增加PPGSL,使变桨在额定风速以下提前动作;在变桨比例项中增加NLGF,使得变桨能快速动作。
2.1 阵风下提前变桨控制策略
在PC上增加PPGSL,如图1虚线框所示,使桨距角给定值由两部分组成,分别是由桨距角发电机转速 PGSL(Pitch Generator Speed Loop)PI控制器给定和PPGSL的PI控制器给定,PC由单个PI控制器变成双PI控制器,PPGSL的作用是当风速迅速上升时,桨距角可以提前动作,以阻止转矩达到上限时的瞬间过速[14]。
PPGSL以实际计算功率与额定功率之差作为输入、桨距角作为输出的PI控制器,在这里实际计算功率为TC输出的原始转矩与发电机转速的乘积,如图3所示。在阵风作用下,发电机转速快速上升,超过额定发电机转速值,虽然给定转矩值还没有达到额定转矩值,但增长很快,此时功率控制环比例项的作用大于积分项,使得变桨在额定风速下提前变桨,而积分项的作用是功率在额定值以下时,桨距角增量Δβ2输出为负值,此时即使桨距角增量Δβ1输出为正值,但总的桨距角增量Δβ输出为负值,把桨距角限制在最优桨距角。

图3 双PI控制器结构框图Fig.3 Block diagram of double PI controller
图3中,Δβ1为PGSL输出的桨距角增量;Δβ2为PPGSL 输出的桨距角增量;a0、a1、b0、b1为 PI控制器数值离散化后的系数,a0=KITS/2+KP,a1=KITS/2-KP,b0=KIQTS/2+KPQ,b1=KIQTS/2-KPQ,其中 TS为采样时间,KI和KP分别为PGSL的积分与比例系数,KIQ和KPQ分别为PPGSL的积分与比例系数。
2.2 阵风下快速变桨控制策略
针对额定风速以上的阵风工况,发电机转速已经远大于额定发电机转速,而且偏差还在不断增加,但此时PC的比例增益却随着桨距角的增加在减少,这样导致了风轮转速的增加。
针对以上情况,对变桨的比例增益,设计增加一个非线性附加项,通过加快回调桨距角,来抑制风轮超速。设计原则是在转速偏差较大而且偏差还在继续增加的情况下,对PGSL的比例项乘以一个数值大于1的增益因子,达到快速变桨,尽快达到最大变桨速率回调桨距角、抑制风轮超速的目的。增益因子的数值选取,要遵循在正常湍流风下不起作用、在极限阵风情况下发挥迅速作用的原则[20]。
图4中,Δω为计算的转速偏差表示对转速偏差求微分运算;Lookup_table为预设的查找表,其中KP_K为比例增益因子,KP_xxdot为发电机转速偏差与其变化率的乘积。
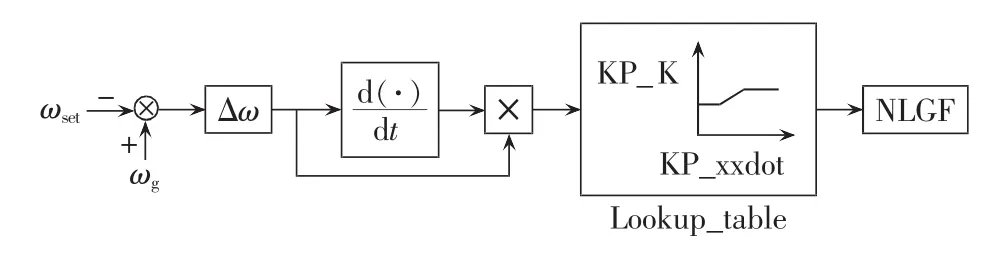
图4 变桨比例项非线性增益因子Fig.4 NLGF added to proportional
2.3 不对称变桨速率
针对一些特殊的阵风工况,风速先急剧下降,然后快速爬坡上升,这时桨距角先减小再上升,由于变桨滞后于风速的原因,风速已经进入上升阶段,但桨距角还在减小,这种工况下,采用不对称变桨速率,即开桨速率小于顺桨速率,通过减小桨距角回调的行程,一定程度上也可以抑制风轮超速。
3 仿真分析
根据风电机组设计标准[19],阵风有风速与风向变化特性,本文为了分析机组的超速机理,仅考虑其风速变化,选取风速单边上升的极限相干阵风ECG(Extreme Coherent Gust)与风速先上升再下降的极限阵风 EOG(Extreme Operating Gust),也即墨西哥草帽风。
仿真的风电机组为2.0 MW变速变桨双馈机组,机组主要参数如下:风电机组类型为水平轴,上风向,额定功率为2000 kW,切入风速为3 m/s,额定风速为 9.1 m /s,切出风速为 20 m /s,叶片数为 3,风轮直径为115 m,塔架高度为80 m,控制方式为变速变桨,齿轮箱速比为130.16,发电机类型为双馈发电机,变桨速率为-6~6°/s,并网发电机转速为 1100 r/min,额定发电机转速为1800 r/min,通过Bladed风电机组设计软件[21]进行双馈机组的变桨控制特性研究和载荷计算。
3.1 阵风下提前变桨控制策略效果验证
本文中PPGSL的比例参数取2×10-7rad/s,积分参数取1×10-7rad/s。一般该比例参数可以由PGSL的比例系数除以TC的比例系数与额定发电机转速的积得到,而积分时间常数通常取1~2 s。

图5 额定风速附近增加PPGSL的阵风控制效果Fig.5 Enhancement of gust control effect of PPGSL around rate wind speed
仿真用的阵风取 EOG,起始风速为 8.8 m /s,阵风幅值为9.6 m,持续时间为10 s。从图5可以看出,在使用了功率变桨环后,PC在第15 s之前,即功率未达到额定功率2000 kW就开始动作,比原先的控制器提前变桨约1 s,从而把发电机最大转速由2020 r/min(大于额定转速的 1.1倍)降低到 1970 r/min左右,效果明显。由于提前变桨,从功率曲线上可以看出,稍微损失了一些功率,而塔架前后的推力没有明显增加,这种工况下,抑制风电机组超速引起的停机是主要控制目的。这说明该功率辅助环不但能平滑过渡于转矩控制与变桨环之间,而且还能有效避免风电机组在瞬态的风速变化过程中过转速、过功率等可能会使机组出现极限载荷的情况。
3.2 阵风下快速变桨控制策略效果验证
本文取变桨NLGF参数时,选用3个点的查找表,如图6所示。选取参数的原则为:在正常运行湍流风工况下,参数不起作用或作用较弱,即参数数值在1附近;在阵风工况下,发电机转速较高,而且转速有继续增加的趋势,则参数值取较大值,一般取2~3,具体跟桨叶翼形有一定关系。图6中3个转折点坐标为:(0,1)、(30,1.35)、(100,2.5)。
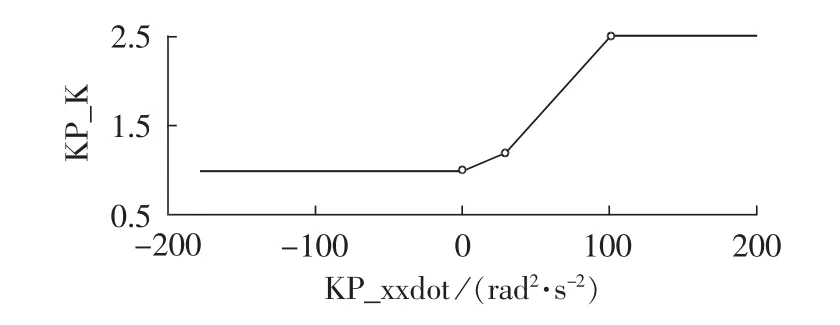
图6 变桨NLGF参数选取方法Fig.6 Setting of NLGF
仿真取ECG,起始风速为9.3 m/s,阵风变化幅值为11 m,持续时间为8 s。从图7可以看出,在阵风出现后,由于使用了新的控制策略,变桨动作速率比原先增加了1°/s左右,变桨系统迅速加速到最大变桨速率进行变桨控制;而同一时刻的桨距角,也比原先增大了2°左右,从而把发电机最大转速由2050 r/min(大于额定转速的 1.1倍)降低到 1960 r/min左右,效果明显。该策略对机组的输出功率影响不大,但由于快速变桨,塔架前后的推力稍微有所增加,这种工况下,主要控制目的还是抑制风电机组超速。这说明变桨比例非线性增益项能使变桨快速动作,有效减少风电机组在瞬态的风速变化过程中出现的过转速情况。
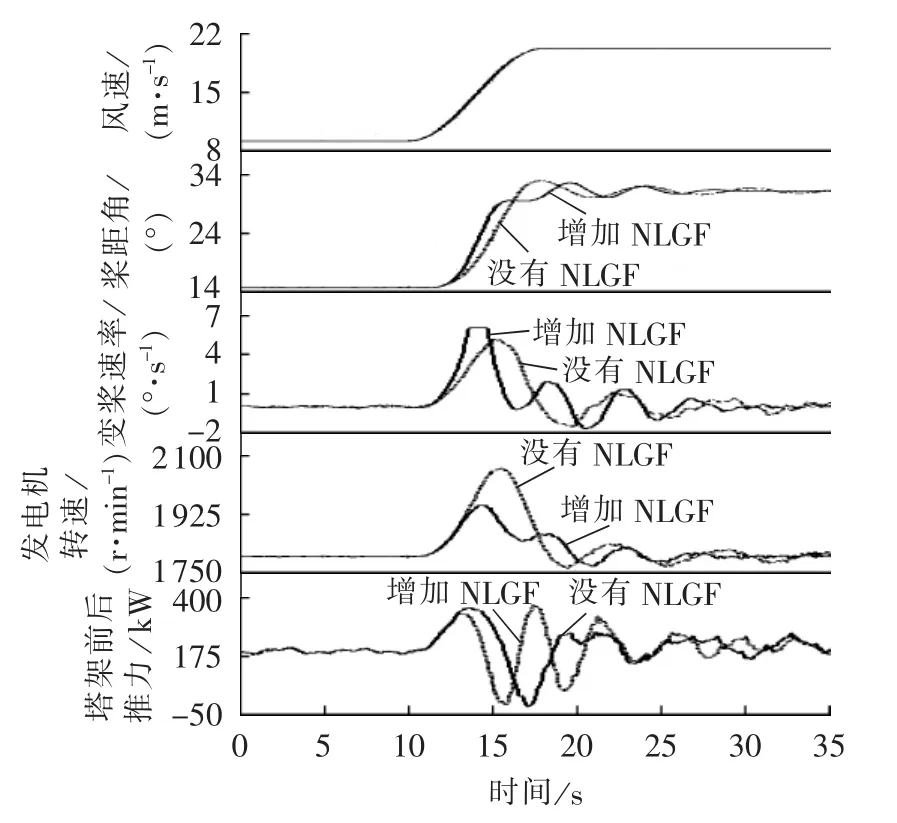
图7 增加NLGF的阵风控制效果Fig.7 Enhanced gust control effect by NLGF
4 控制策略现场测试验证
在测试风电场选取了4台风电机组,分成2组进行控制策略验证,每组的2台机组在机位上相邻,地形上相似。控制器均升级了控制软件,一组对比PPGSL效果,另一组对比NLGF效果。
在现场测试的3个月时间里,没有采用阵风控制策略的机组,发生超速停机17次,而增加阵风策略的机组,停机次数减少到4次,有效减少了停机次数。停机的原因是由于风速变化幅度过大,而变桨动作速率是有限的。经过现场测试验证,采用阵风控制策略后,能有效抑制机组过转速,避免不必要的脱网停机。

图8 风电机组在阵风工况下超速停机的录波图Fig.8 Shutdown of wind turbine due to over-speed in gust condition
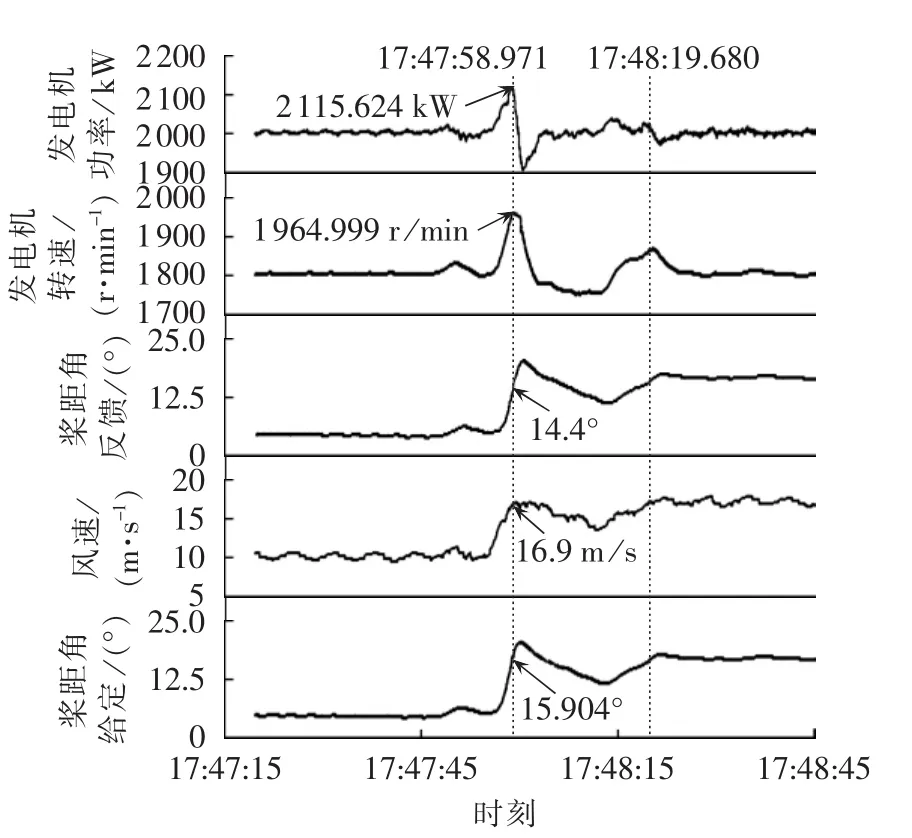
图9 风电机组在阵风工况下正常运行的录波图Fig.9 Normal operation of wind turbine in gust condition
图8、图9为控制器记录的一次极限阵风工况,风速在5 s内从10 m/s增加到17 m/s左右,风轮转速达到1980 r/min,触发软件过转速保护后脱网停机。而采用变桨NLGF的风电机组,风速情况基本类似,则成功地应对了该次阵风,风电机组继续运行发电。
5 结论
在分析变速变桨风电机组传统PC策略的基础上,针对阵风工况下机组容易发生风轮超速引起停机的问题,本着在阵风工况下变桨提前动作与快速动作的原则,结合变速变桨控制算法基本结构,在PC上增加PPGSL,使变桨在额定风速以下提前动作;在变桨比例项中增加NLGF,使得变桨能快速动作。
Bladed软件仿真与现场测试结果表明,上述控制策略能有效地改善风电机组在阵风工况下的动态响应特性,降低风电机组机械载荷,增加发电量,提高电网的稳定性。
参考文献:
[1]HAANPA¨A¨S,LEHTONEN S,PELTONEN L,et al.Impacts of winter storm Gudrun of 7th-9th January 2005 and measures taken in Baltic Sea Region[R].Helsinki,Finland:Centre for Urban and Regional Research,2006.
[2]赵靓.1.5 MW、2 MW风电机组风轮直径发展趋势[J].风能,2014,25(5):34-37.ZHAO Liang.Rotor diameter development trends of 1.5 MW and 2 MW wind turbine[J].Wind Energy,2014,25(5):34-37.
[3]叶杭冶.风力发电机组监测与控制[M].北京:机械工业出版社,2011:123-125.
[4]王江.带增益调度的风力发电变桨距控制研究[J].电器时代,2009,15(2):52-53.WANG Jiang.New control method of variable pitch system with variable gain PID controller[J].Electric Area,2009,15(2):52-53.
[5]IANCHI F D,DE BATTISTA H,MANTZ R J.Wind turbine controlsystems-principles,modelling and gain scheduling design[M].Berlin,Germany:Springer-Verlag,2007.
[6]郭鹏.结合风轮气动特性分区的多PID切换变桨距控制[J].中国电机工程学报,2010,30(增刊):153-158.GUO Peng.Multiple PID switching variable pitch control strategy based on divided scope of rotor aerodynamic characteristic[J].Proceedings of the CSEE,2010,30(Supplement):153-158.
[7]VANDER HOOFT E L,VAN ENGELEN T G.Estimated wind speed feed forward control for wind turbine operation optimization[R].Westerduinweg,Netherlands:Energy Research Center of the Netherlands(ECN),2004.
[8]KANEV S,VAN ENGELEN T G.Wind turbine extreme gust control[J].Wind Energy,2010,13(1):18-35.
[9]WANG N,JOHNSON K E,WRIGHT A D.FX-RLS-based feedforward control for LIDAR-enabled wind turbine load mitigation[J].IEEE Transactions on Control Systems Technology,2012,20(5):1212-1222.
[10]BOSSANYI E A.Un-freezing the turbulence:application to LiDAR-assisted wind turbine control[J].Renewable Power Generation,2013,7(4):321-329.
[11]WOUTERS D A J,VAN ENGELEN T G.Modern wind turbine controller design[R].Westerduinweg,Netherlands:Energy Research Center of the Netherlands(ECN),2009.
[12]VANDER HOOFT E L,VAN ENGELEN T G,SCHAAK P,et al.Design tool for wind turbine control algorithms[R].Westerduinweg,Netherlands:Energy Research Center of the Netherlands(ECN),2006.
[13]VAN ENGELEN T G,VANDER HOOFTET E L.Development of wind turbine control algorithms for industrial use[R].Westerduinweg,Netherlands:Energy Research Center of the Netherlands(ECN),2009.
[14]林志明,潘东浩,王贵子,等.双馈式变速变桨风力发电机组的转矩控制[J].中国电机工程学报,2009,29(32):118-124.LIN Zhiming,PAN Donghao,WANG Guizi,et al.Torque control of doubly-fed variable speed variable pitch wind turbine [J].Proceedings of the CSEE,2009,29(32):118-124.
[15]张永斌,袁海文.双馈风电机组低电压穿越主控系统控制策略[J].电力自动化设备,2012,32(8):106-112.ZHANG Yongbin,YUAN Haiwen.Control strategy of DFIG main control system during low voltage ride through[J].Electric Power Automation Equipment,2012,32(8):106-112.
[16]朱瑛,程明,花为,等.基于2种变速变桨距方法的双功率流风力发电系统功率控制[J].电力自动化设备,2013,33(9):123-129.ZHU Ying,CHENG Ming,HUA Wei,et al.Power control of dual power flow wind energy conversion system based on two variable-speed variable-pitch control methods[J].Electric Power Automation Equipment,2013,33(9):123-129.
[17]王斌,吴焱,丁宏,等.变速变桨距风电机组的高风速变桨距控制[J].电力自动化设备,2010,30(8):81-83.WANG Bin,WU Yan,DING Hong,et al.Variable-pitch control of wind turbine at high wind speed[J].Electric Power Automation Equipment,2010,30(8):81-83.
[18]BOSSANYI E A.The design of closed loop controllers for wind turbines[J].Wind Energy,2000,18(3):149-163.
[19]IEC.Wind turbine:part 1 design requirements:IEC61400-1-2005[S].Geneva,Switzerland:International Electrotechnical Commission,2005.
[20]BOSSANYI E A.Controller for 5 MW reference turbine[R].Bristol,England:Garrad Hassan and Partners Limited,2009.
[21]BOSSANYI E A.GH bladed user manual[R].Bristol,England:Garrad Hassan and Partners Limited,2009.