车辆轮廓识别及动态称重同步检测系统研究
2016-05-17杜长东
唐 练,杜长东
(重庆市华驰交通科技有限公司, 重庆 400060)
车辆轮廓识别及动态称重同步检测系统研究
唐练,杜长东
(重庆市华驰交通科技有限公司, 重庆400060)
摘要:随着交通运输事业的快速发展,交通阻塞、事故增多、能源浪费等社会问题日趋严重。交通检测能够有效缓解并治理常见的超限、超载等现象。将动态称重技术与电磁波检测技术相结合,进行交通检测对比试验,深入研究动态称重技术与电磁波检测技术的时序同步关系,全面准确获取多种车辆特征数据,为交通管理养护等部门提供决策依据。试验结果表明:车辆总重误差≤±5%,速度测量误差≤±2 m/h,轴距识别小于100 mm,车辆轮廓误差可控制在150 mm以内。
关键词:动态称重;电磁波检测;轮廓识别;交通检测
在交通数据检测领域,弯板动态称重[1-6]技术属于接触式技术。基于弯板动态称重技术的动态称重系统能够获取大量车辆特征数据,但若仅利用该技术进行交通检测则获取的特征数据并不全面,如车辆轮廓数据[7]。经过长期的研究与试验,发现弯板动态称重技术自有的时序性、稳定性、信息量还可以与其它非接触式技术相结合,从而发挥更大功效。电磁波检测技术具有良好的方向性和准确性,在勘察、道路检测、考古、环境工程、军事应用等领域都得到广泛应用。在交通数据检测应用方面,它可以较为准确地获取其它接触式技术难以获取的车辆轮廓数据。本文介绍如何将电磁波检测技术与弯板动态称重技术有效结合,并从理论和试验2方面充分考虑二者的同步性,对同时准确获取车辆轮重、轴重、轴组重、总重、当量轴次、轴距、车长、车宽、车高、车头高、车辆轮廓、通行时间、速度、加速度等数据的综合交通检测系统进行研究,为交通养护管理等部门提供全面、可靠的交通数据依据。
1系统基本组成原理
基于弯板动态称重及电磁波测距基本原理开发的车辆轮廓识别及动态称重同步检测系统主要由弯板传感器、电磁波测距仪、智能称重仪和信号调理模块组成,如图1所示。
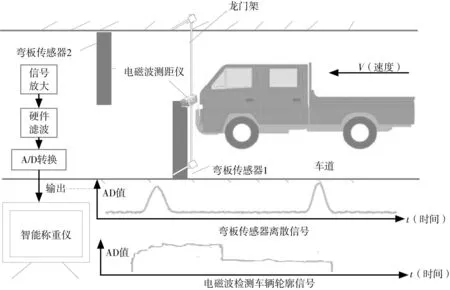
图1 车辆轮廓识别及动态称重同步检测系统基本组成
车辆轮廓识别及动态称重同步检测系统中,弯板传感器的宽度小于车辆轮胎直径,以保证同一时刻只有车辆的1个承重轴作用于传感器;长度大于车辆承重轴长度,以保证同一时刻车辆的1个承重轴完全作用于传感器之上;且每车道左右平行安装2块弯板传感器。电磁波测距仪安装于合理匹配车道尺寸的龙门架上,并与弯板传感器信号同步。
电磁波测距仪根据相位式测距原理设计。相位测距法采用可见激光进行测量,通过比较回波与发射波的相位差得到距离信息。目前民用激光测距传感器多采用相位测距法,因为相位测量技术较为成熟,测距精度较高。本文介绍的电磁波测距仪输出入端可以通过250欧姆标准电阻将电流信号转为电压信号,对应电压输出范围为0~5 V,对应电压距离灵敏度约为100 mV/m。
智能称重仪是车辆轮廓识别及动态称重同步检测系统的核心控制器,其为车辆动态称重和轮廓识别提供硬件处理平台,并根据系统功能需求集成了嵌入式主板、A/D数据采集卡、D/A数据转换卡和电源模块。
信号调理模块用于将弯板传感器信号和电磁波检测信号转换为有效电平信号,并进行放大、滤波、线性化补偿、隔离、保护等。
车辆轮廓识别及动态称重同步检测系统工作流程如图2所示。
当车辆轮胎驶过弯板传感器时,弯板传感器受力形变被转换为电压信号,同时电磁波测距仪根据时间飞行原理快速连续扫描车辆经过时的轮廓变化信号。弯板电压信号和电磁波检测信号经过不同通道被放大器放大后,由硬件滤除车辆经过时的高频噪声,再由A/D转换模块对信号采样,得到离散信号。智能称重仪对离散信号进行各种分析与预处理,最终输出车辆轮廓识别及动态称重同步结果——车辆特征数据。
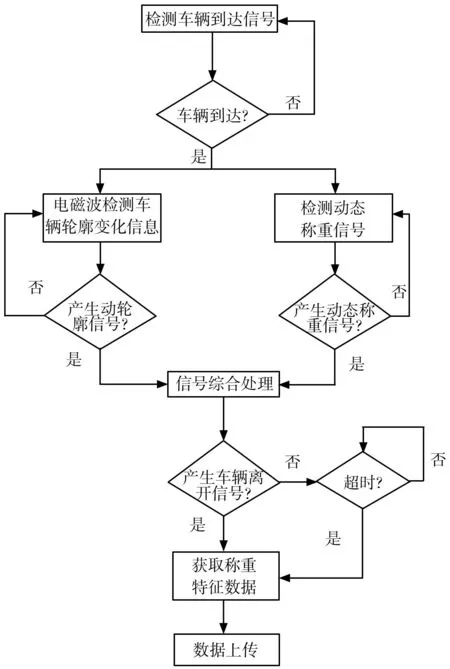
图2 车辆轮廓识别及动态称重同步检测系统工作流程
2车辆轮廓信号与弯板传感信号同步技术
全面获取车辆特征数据的关键是车辆轮廓信号与弯板传感信号同步。以2轴车产生的车辆轮廓信号与弯板传感信号关系为例,进一步说明车辆轮廓信号与弯板传感信号具有的时间同步关系。2轴车辆产生的弯板传感器信号与电磁波检测信号关系如图3所示。
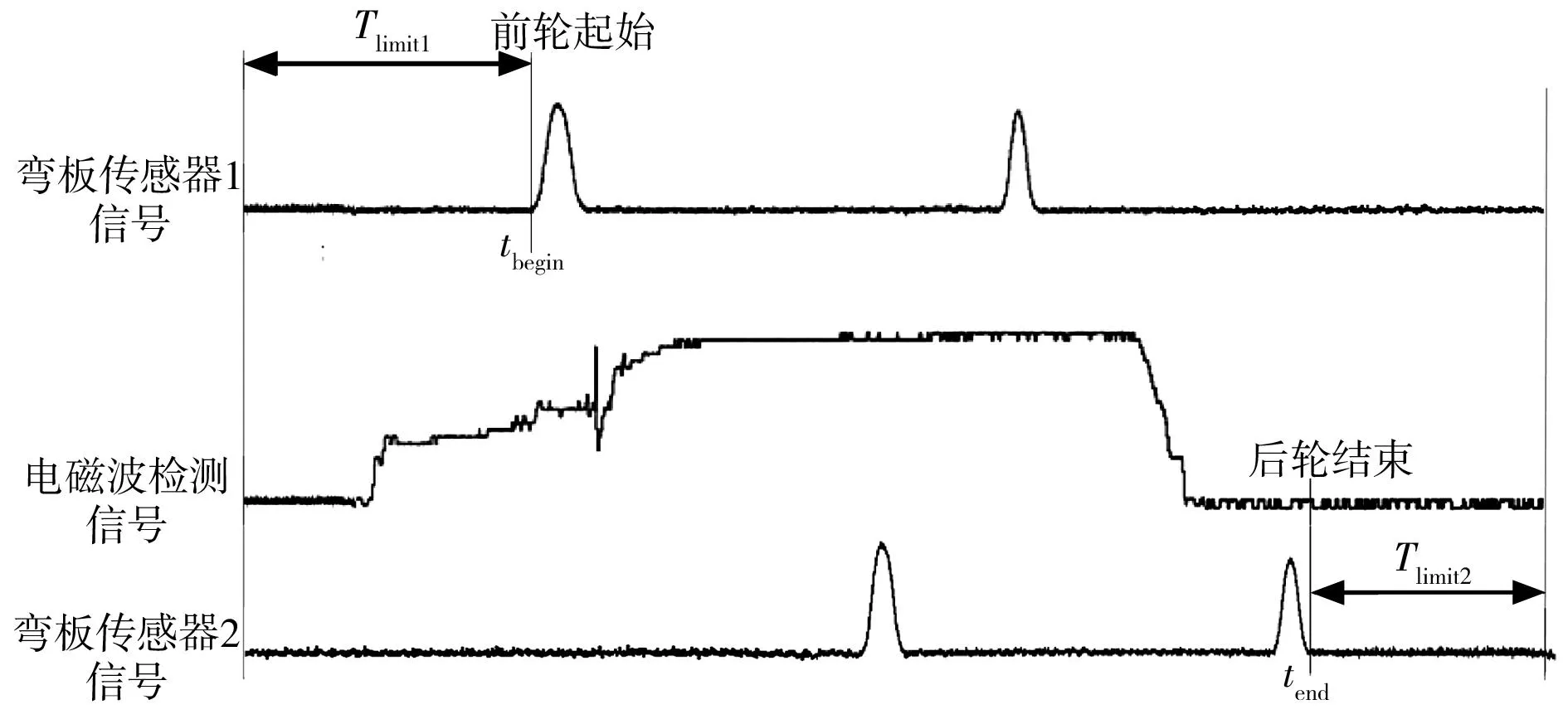
图3 2轴车辆产生的弯板传感器信号与
由图3可知,将车辆轮轴压在第1块弯板传感器产生的起始波形时刻tbegin向前扩展Tlimit1的时间范围,车辆轮轴压在第2块弯板传感器产生的最后波形时刻tend向后扩展Tlimit2的时间范围,Tlimit1和Tlimit2根据实际车辆跟车距离进行确定和调整,扩展后的整个时间范围T可将车辆轮廓信号完全包含在内。T计算式为:
T=Tlimit1+tend-tbegin+Tlimit2
(1)
即使由于电磁波检测受车辆颜色波长、天气等因素影响不能完全接收车辆轮廓信号,在时间T范围内的信号波形还可以用软件算法进一步优化处理。获得车辆轮廓信号后,取第1块弯板传感器波形起始时刻tbegin作为车辆车头高度计算基本位置,从已计算的车头高度处开始,向后取一定数量点的平均值计算车辆高度,并按式(2)计算车辆长度Lvech。
Lvech=tvech×V
(2)
式中:tvech为车辆通过电磁波检测时间;V为车辆通过速度。
3系统试验与结果
车辆轮廓识别及动态称重同步检测系统试验场地路段为非交通车辆通行主干道,出入车辆较少,故试验过程中安装与调试不容易受周围环境影响。试验场地路面为水泥混凝土路面,宽约8m,坡度较小,检测车道可以同时设置2个。2块弯板传感器以2~3 m的距离前后平行安装于待测车道,在路面靠近待测车道一侧立一T型杆用于固定和安装电磁波测距仪。电磁波测距仪距地面约6 m,并垂直于第1块弯板传感器和车道中心线。智能称重仪连同电源、机柜、防雷器等配套设备安装于试验路段的另一侧,电磁波测距仪及弯板传感器电缆分别接入智能称重仪不同数据采集通道。车辆轮廓识别及动态称重同步检测系统安装后的效果如图4所示。

图4 车辆轮廓识别及动态称重同步检测系统试验安装效果
试验车辆采用IVECO两轴轻型小客车,获取的详细特征量和车辆轮廓分别如表1及图5所示。试验车辆实际车重为2 400 kg,轴距为2 700 mm,车长为4 600 mm,车高为2 480 mm,车头高为1 350 mm。

表1 IVECO两轴轻型小客车试验数据
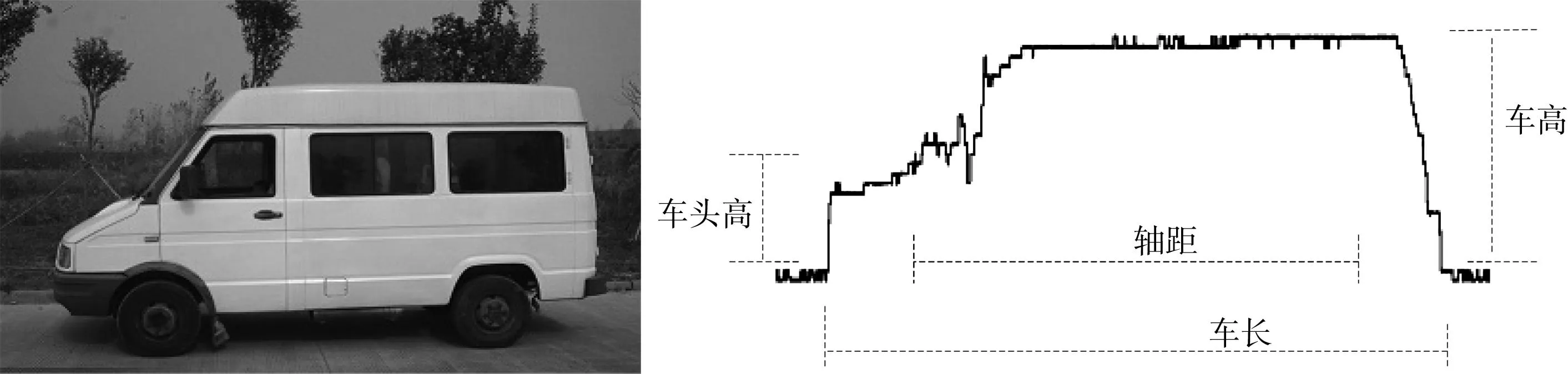
图5 实际IVECO车辆与试验车辆轮廓对比
试验测试速度范围为10~20 km/h,获取的A/D采集点可较为全面地保留车辆特征信息。车重和轴距分别由2块弯板传感器产生的AD值积分和峰值获得。第1块弯板传感器产生的起始波形时刻和第2块弯板传感器产生的最后波形时刻由同步技术将1辆完整的车辆轮廓信息准确标识。在此基础上,通过分析试验车辆轮廓信号峰值和进行长度计算来得到车长、车高和车头高。
试验结果表明,车辆轮廓识别及动态称重同步检测系统可实时、智能、高速地采集车辆动态称重信号和轮廓信号,通过信号同步可准确计算并获取车辆总重、轴重、轴组重、当量轴次、轴距、通行时间、速度、加速度等数据;主要特征量如车辆总重误差≤±5%,速度测量误差≤±2 km/h,轴距识别小于100 mm,车辆轮廓误差可控制在150 mm以内。
4结束语
车辆轮廓电磁波检测技术与弯板动态称重技术相结合能够有效同步和互补,基于弯板动态称重及电磁波测距基本原理开发的车辆轮廓识别及动态称重同步检测系统可准确、全面地采集多种交通数据,其不仅可为交通管养部门提供决策支持,解决多种交通问题,而且还有很好的经济效益,具有良好的应用前景。
参 考 文 献
[1]PETERS R J. An Unmanned and Undetectable Highway Speed Vehicle Weighing System[C]//ARRB, Proceedings of the 13th Australian Road Research Board Conference. Adelaide:Australian Road Research Board,1986.
[2]LILJENCRANTZ A,KAROUMI R,OLOFSSON P. Implementation of bridge weigh-in-motion for railway traffic[J]. Computers and Structures,2007,85(1-2):80-88.
[3]贺曙新.车辆动态称重技术的历史、现状与展望[J].中外公路,2004(6):104-108.
[4]孙婧.动态称重设备市场发展概况及竞争格局研究[J].中国交通信息化,2012(2):134-135.
[5]NIEDZWICCKI M,WASILCWSKI A.Application of adaptive filtering to dynamic weighing of vehicles[J]. Control Eng.Practice,1996(4):635-644.
[6]李扬.国外汽车超载治理技术的发展及应用[J].公路工程与运输,2004(9):80-82.
[7]连捷,赵池航,张百灵,等.基于车辆轮廓对称与车牌定位信息融合的车辆检测方案[J].东南大学学报(英文版),2012(2):240-244.
[8]董清华.混凝土无损检测中的层析成像技术[J].无损检测,2006(1):31-33.
Research on Synchronous Detection System for Vehicle Contour Recognition and Dynamic Weighing
TANG Lian, DU Changdong
Abstract:With fast development of traffic transportation, social problems such as traffic jam, more accidents and energy waste, etc. become increasingly serious. Traffic detection can relieve and treat common phenomena such as over-limit and over-load, etc. This paper combines dynamic weighing technology and electromagnetic wave detection technology to perform comparative test of traffic detection, deeply studies time sequence synchronization relationship between dynamic weighing technology and electromagnetic wave detection technology, and fully and accurately acquire characteristic data of multiple vehicles to provide bases of decision for traffic management and maintenance departments, etc. The test results show that the error in total weight of vehicles is ≤±5%, the measuring error of speed is ≤±2 m/h, the wheelbase recognition is less than 100 mm, and the error in vehicle contour can be controlled within 150 mm.
Keywords:dynamic weighing; electromagnetic wave detection; contour recognition; traffic detection
文章编号:1009-6477(2016)02-0117-04
中图分类号:U491.2
文献标识码:A
作者简介:唐练(1987-),女,重庆市人,硕士,工程师。
收稿日期:2015-11-06
基金项目:重庆市科技人才培养计划项目(cstc2013kjrc-tdjs70002);重庆市基础与前沿研究计划项目(cstc2014jcyjA30022)
DOI:10.13607/j.cnki.gljt.2016.02.026