浮动车在城市智能交通系统中的应用简述
2016-05-17付建胜王川久刘梦依
阮 巍,付建胜,王川久,刘梦依
(1.重庆云途交通科技有限公司, 重庆 400067; 2.吉林大学交通学院, 长春 130022)
浮动车在城市智能交通系统中的应用简述
阮巍1,2,付建胜1,王川久1,刘梦依2
(1.重庆云途交通科技有限公司, 重庆400067; 2.吉林大学交通学院, 长春130022)
摘要:以浮动车数据处理,基于浮动车的路段车速估计、行程时间估计以及交通状态判别和动态路网OD估计为序,对浮动车技术在城市智能交通系统中的应用进行递进式归纳和总结,并探讨目前研究的不足且对未来研究进行展望。
关键词:浮动车;城市智能交通系统;参数估计;状态判别
浮动车是指安装了GPS模块和无线通信模块等终端设备的机动车。其中,GPS模块负责接收卫星定位信号并记录车辆的经纬度坐标和瞬时车速等浮动车数据;无线通信模块负责将车载终端ID、经纬度坐标、瞬时车速、时间戳等有关数据依照一定时间间隔传送给交通控制中心,同时负责接收交通控制中心下发的指令。
浮动车的应用始于20世纪90年代初[1],但直到2000年美国取消了GPS选择可用性限制后,浮动车技术才被广泛应用于交通领域。相较以往固定型交通信息采集设备,浮动车具有覆盖面广、安装简单、维护成本低且信息采集实时性强、精度高等优势。浮动车系统的工作原理是对路网交通状况进行实时抽样并处理分析。如果浮动车对路网的覆盖率及采样频率均能达到要求,则其便能获取足够的交通信息并上传给交通控制中心。交通控制中心结合GIS对浮动车系统中的海量信息进行大数据分析,便可以实现对路网实时运行状况的感知,为其后续应用决策提供可靠的技术支撑,如交通控制、智能导航、应急决策以及动态路径规划等。
本文以浮动车数据预处理,基于浮动车的路段车速估计、行程时间估计以及交通状态判别和动态路网OD估计为序,对浮动车技术在城市智能交通系统中的应用进行递进式归纳和总结,并基于上述分析指出现状研究的不足,且对后续研究进行展望。
1浮动车数据处理技术
卫星及通信系统误差、复杂的驾驶行为、复杂的天气状况及浮动车的覆盖率、采样频率偏低等都会影响浮动车数据的可用性。有学者指出浮动车的数据质量符合“80/20法则”,即路网中80%的浮动车数据对于后续路段车速估计、行程时间估计及交通状态判别等都是不可靠的。为此,学者们从数据处理(包括数据预处理、数据融合)和地图匹配2方面对浮动车数据的可用性进行了改善。
1.1数据处理
数据预处理主要针对故障数据,包括故障数据识别、故障数据修复以及数据滤波;数据融合主要针对浮动车数据样本量小、采样间隔大等问题,整合多方数据源进行的综合应用。比较而言,数据融合更复杂但也更具优势,是未来研究的趋势。
数据预处理方面,故障数据识别的理论方法主要有低阶多项式滑动回归法、聚类方法、关联规则等;实际应用中多采用阈值法,包括时间阈值法、速度阈值法和经纬度阈值法等。故障数据修复的理论方法主要有小波消噪法、免疫算法和谱减法等;实际应用中多采用历史趋势法、历史趋势与实测数据加权法、相邻时段数据修复法、相邻路段数据修复法和线性插值等。其中历史趋势法和历史趋势与实测数据加权法因需从历史数据库中重新调取数据,处理速度相对较慢。数据滤波处理常用方法有移动平均法、指数平滑法、平滑数据的奇异值分解滤波法和卡尔曼滤波法等,其中卡尔曼滤波法属线性回归方法,精度较高。根据正常情况下路网交通流的变化是一个平稳的随机过程,姜桂艳等[2]利用历史数据的均值与方差对采样数据进行了错误数据识别。另外,姜桂艳等[5]还采用门限技术对GPS信息中偏离整体趋势的离散值进行剔除后再进行滤波处理,克服了滤波处理过程中可能破坏GPS原有定位误差分布规律的问题。王晓原等[3]提出了粗集理论与支持向量机相结合的数据补齐方法和灰色理论支撑下的错误数据修正法。杨兆升等[4]则从组合定位的角度对GPS数据进行了标准卡尔曼滤波预处理,效果明显。
数据融合包括不同类型浮动车数据之间的数据融合以及浮动车与线圈、视频等不同数据源之间的数据融合2类,主要有粗糙集理论、Dempster证据理论以及模糊理论等研究方法。钱寒峰等[6]通过速度阈值的设定对数据进行了融合,排除了错误速度数据及“假行驶”现象数据,并利用历史数据库与实时数据进行融合,解决了浮动车样本量不足、代表性差的问题;还将浮动车数据与固定检测器数据进行融合,解决了复杂路网下车速的估计问题。Pan等[7]依据浮动车数据的特性,按照动态路段整合思想,对不同类型浮动车的速度进行拟合估计后提出了多类型浮动车速度加权融合的路段车速估计模型。廖孝勇[8]分析了出租车和公交车的行驶特性以及相应的GPS数据特征后,按照二者数据的有效占比建立了出租车和公交车的混合浮动车路段平均速度估计模型。Treiber等[9]基于一种改进的自适应指数平滑法对浮动车数据和SDD进行融合,实现了对高速公路交通流和速度的估计。
1.2地图匹配
地图匹配是针对浮动车样本点较为离散且不能直接呈现在二维路网平面上的问题对浮动车数据的可用性进行改善。地图匹配算法主要有几何匹配算法、概率统计匹配算法、卡尔曼滤波算法、模糊理论以及人工神经网络等。目前,随着用户需求的增长和计算机处理能力的发展,路网层次划分和“海量”浮动车数据的实时匹配已成为地图匹配的2个研究热点。
路网划分方面,Wang[10]明确了匹配效率对于地图匹配的重要性,并指出有效削减待匹配路段数量可以提高匹配效率。吴伟[11]提出了一种网格置信度的量化方法并建立了新的待匹配路段初筛算法,实现了在新的网格划分规则和索引下的分布式并行地图匹配,显著提高了匹配效率。“海量”数据实时匹配方面,研究焦点主要集中在对传统算法的改革和对先进技术的应用。其中,余洋[12]改进了传统均匀格网地图匹配算法的索引结构和对历史数据的延迟匹配,提出了考虑时间因素的匹配度反馈匹配算法,并给出了“云环境”下大样本数据的处理方法。杨喆[13]基于SVM在KD-50-I-E平台上运用Map/Reduce并行编程,实现了一种新的多分类地图匹配方法。Bouiliet等[14]利用IBM流处理平台实现了高吞吐量数据的地图匹配。Xiao Gang等[15]则在多核CPU计算机上利用MPI实现了并行地图匹配。
2基于浮动车的交通参数提取技术
交通参数的有效提取是进行准确决策的前提。车速可用于道路交通状态判别、交通事件检测及道路交通管理等,行程时间可用于出行诱导、智能导航及动态路径规划等。固定的路段长度也使得二者在表征道路交通状况,进行道路交通管理控制及策略制定方面具有相同的作用。从应用角度考虑,车速和行程时间估计的研究主要有理论分析和工程应用2类。
2.1车速和行程时间的理论分析研究
车速和行程时间的理论分析方法主要有多元回归模型、神经网络模型、卡尔曼滤波模型、遗传算法和模糊推理等。
车速估计方面,Chang等[16]考虑到传统速度估计模型在交通拥挤状况下精度不高,提出先进行拥堵状态判别,再利用模糊推理进行平均速度估计的方法。Zou等[17]根据分段加权思想将路段划分为Smooth Part和Intersection Part两部分,然后根据浮动车样本点在两相邻路段的分布进行时间和速度的提取,最终得到整条路径的平均速度,具有一定的应用价值。Qing等[18]将浮动车、视频及线圈的数据进行了融合应用,与以往将2种数据源间(不同类型浮动车数据之间或浮动车与其它检测器数据之间)的传统数据融合方法相比,Qing等利用了更多类型的数据资源。针对小样本及大采样间隔数据,Pan等[7]按照动态路段整合的思想,采用最小二乘法拟合多类型浮动车速度后,提出了多类型浮动车速度加权融合的平均速度估计模型。廖孝勇[8]分析了出租车和公交车的行驶特性和GPS的数据特征后,按照二者数据的有效占比,建立了公交车和出租车的多类型混合浮动车路段平均速度估计模型。
行程时间估计方面,Jenelius等[19]将路径行程时间分为路段行程时间和交叉口延误时间2部分,在路段行程时间呈多元正态分布且交叉口延误用替代函数表示的前提下,提出了一种基于低频浮动车数据的统计模型,该模型采用最大似然估计的方法进行参数估计和优化,并采用空间聚类法进行路网界定,试验表明该模型能够快速准确地获取行程时间。Rahmani等[20]指出在采用低频浮动车数据进行路径行程时间估计时,浮动车对路径的不完全遍历、非均匀覆盖、采样车代表性差等原因均会对路径行程时间的估计带来偏差,因此,对路段行程时间呈固定分布的假设并不合理。为此他将采样时间进行转换、加权和聚合等处理,实现了对路径行程时间的非参数估计,具有一定的理论及实际意义。另外,Rahmani等[21]还引入自动车辆识别信息,通过综合分析自动车辆识别数据和浮动车数据对样本数据覆盖的路由进行串联(对于缺失的路由时间则根据历史数据或相邻的路由时间进行推测),并根据串联路由在目标路径中的重要程度、采样数据偏差及数据可信度3方面对各路由时间进行加权,以获取目标路径完整的行程时间。陈仕骁[22]利用感应线圈数据划定了交叉口延误影响区,在利用浮动车数据进行路段平均行程时间估算时,首先将影响区内的数据进行剔除,提高了时间估计的精确度。Ehmke等[23]提出了基于数据挖掘的K-means算法,该方法属于一种面向城市物流的大范围、长路径的行程时间估计方法。
2.2车速和行程时间的工程应用研究
车速和行程时间的工程应用类的研究主要分2种:一种是基于浮动车瞬时速度信息的估算方法;另一种是结合GIS地图匹配,利用浮动车时间戳的估计方法。具体如表1、表2所示(相关参数参照注解)。
3基于浮动车的交通状态感知技术
3.1路网交通状态判别
按照判别依据不同,交通状态判别可分为2类:一类是依据路段行程时间或车速的单因素交通状态判别;另一类是考虑多因素的综合交通状态判别。交通状态判别的研究方法主要有加州算法、McMaster算法、指数平滑法、标准偏差法、改进的DS-ANN算法以及模糊判断等。Chen Qing[24]采取先拟合后积分的方法得到路段平均速度,然后利用简单的一维模糊方法对交通状态进行了判定。刘俏[25]考虑城市路网交通流多维度的特征,设定了“路网交通拥塞指数”等5项指标,并基于实时行程车速给出了指标的计算方法,仿真效果良好。田世艳[26]引入了行程时间延误因素,在车速信息的基础上采用模糊综合评判的方法对实时交通状态进行了判别。吴佩莉[27]依据非高峰时段发生交通拥堵的区域有限,根据相似轨迹聚类的思想提出了拥堵同伴发现算法,其基本思想为先将可能发生拥堵路段的浮动车数据筛选出来进行拥挤优先级初步判断,然后根据优先级别给予不同等级的关注强度,既保证了拥堵监控的准确性又降低了系统的负载,用北京市的出租浮动车数据验证有效。
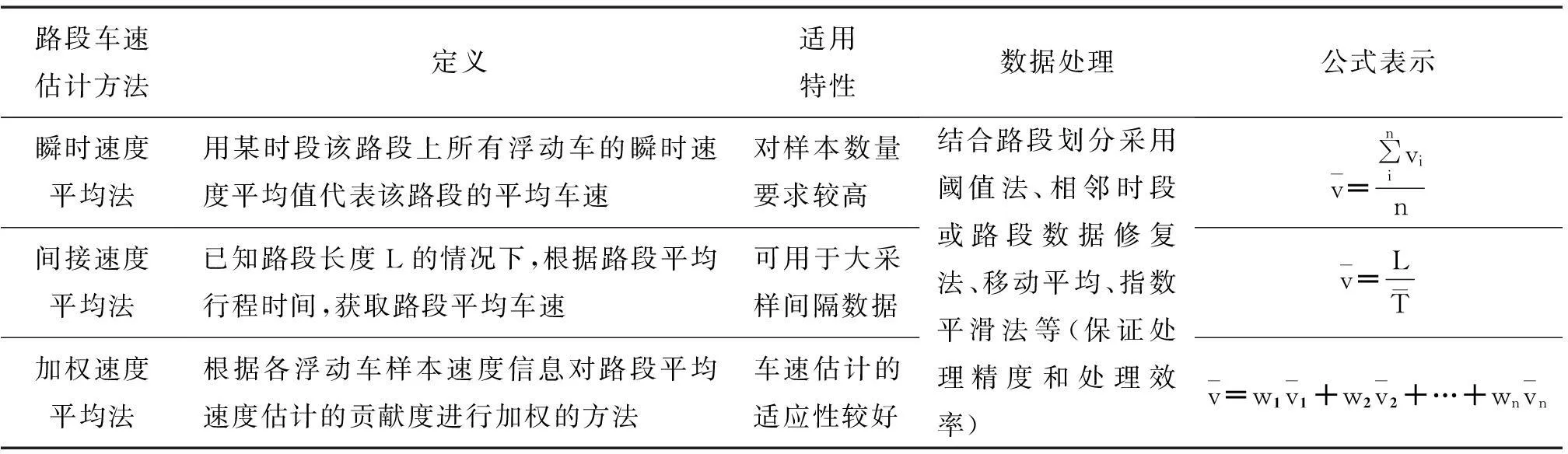
表1 基于浮动车的路段车速估计方法

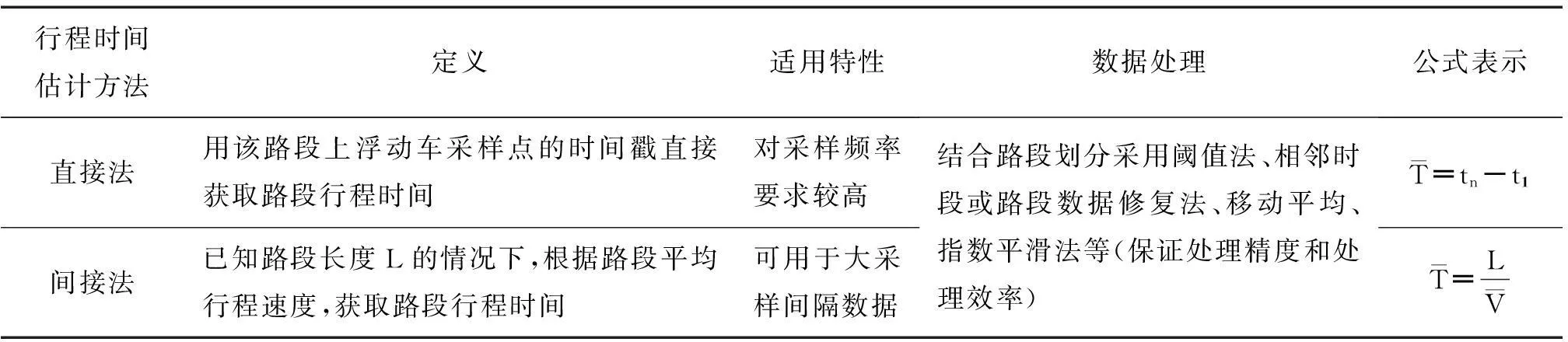
表2 基于浮动车的行程时间估计方法

3.2动态路网车辆起讫点(OD)分布估计
路网动态OD是城市交通管控措施制定与评估的基础,也是实现动态路径规划的直接参考。利用浮动车进行路网动态OD估计方面的研究较少,基本思想为获取已有浮动车的动态OD状况并进行放大处理以获取整个路网的动态OD分布。其中,张存保、杨晓光[28]提出先获取某段时间内到达终点的浮动车OD矩阵,再根据该时间段内出发的全部车辆OD状况实现对路网车辆的动态OD估计。赵慧[29]提出了一种浮动车和RTMS(remote traffic microwave sensors,远程微波传感器)相结合的动态OD估计模型,即利用RTMS进行OD反推得到与现实需求相匹配的静态OD需求,再根据浮动车数据与每个OD对的时变拆分比例获取动态OD需求。另外,Zhang Yi等[30]在充分考虑了手机信号切换信息、手机用户个体特征信息以及手机数量不等于车辆数量等因素后,建立了根据手机数量推算车辆数量的手机浮动车数学模型,并根据Horvitz-Thompson估计对车辆OD进行了推断。Cao Peng等[31]则根据路段交通流量来进行动态OD估计,他先根据浮动车的车速信息用Bayesian和传统方法对路段的动态流量进行计算,随后使用双层广义最小二乘估计进行迭代并得到路网的动态OD。
4浮动车技术研究展望
智能交通在缓解交通问题方面已经获得了世界各国的普遍认可,世界各国也都在积极地进行着智能交通相关技术的研究。就世界范围而言,浮动车技术在智能交通领域的研究已较为全面,其技术已广泛应用于交通管控策略制定、动态路径诱导、智能导航、路网交通状况实时监测及交通事件预警等领域。但是,我国目前有关浮动车的研究大多考虑因素不够全面,缺乏实用性;浮动车的定位信息获取主要依赖美国的GPS定位系统,缺乏自主性;整个浮动车系统的相关规范及标准欠缺(包括数据格式、网络传输协议等方面),不利于行业发展。在未来研究中,应综合考虑各种因素,充分研究浮动车的定位精度、采样频率等对浮动车样本量的影响,以期在保证精度的前提下节约成本。同时,我国北斗导航系统的完善,也为我们寻求自主定位导航提供了契机,故有必要进行北斗导航系统和GPS系统的综合研究,甚至研究抛弃GPS系统而使用北斗系统实现精确定位的技术,一是可以综合利用北斗系统和GPS系统提高定位精度;二是可以保证我国交通产业发展的自主性,避免受制于人。另外,未来交通信息的采集必然是多手段、多时空分布的,交通信息的融合应用将成为趋势,一方面应加强这方面的研究并积极推进研究成果的示范验证;另一方面,还应积极推进该领域国家标准的制定,为该领域的研究、发展奠定基础。
5结束语
本文以浮动车数据预处理,基于浮动车的路段车速估计、行程时间估计以及交通状态判别和动态路网OD估计为序,对浮动车技术在城市智能交通系统中的应用进行了递进式的归纳和总结。当前基于浮动车的应用研究已有了相当的深度和广度,而且随着3S技术的不断发展以及浮动车种类及渗透率的逐步增加,浮动车技术必将成为智能交通实现的重要手段和技术支撑。
参 考 文 献
[1]BOYCE D E,KIRSON A,SCHOFER J L. Design and implementation of ADVANCE: The Illinois dynamic navigation and route guidance demonstration program[C]//Vehicle Navigation and Information Systems Conference. Toronto:IEEE,1991.
[2]姜桂艳,冮龙晖,张晓东,等.动态交通数据故障识别与修复方法[J].交通运输工程学报,2004(1):121-125.
[3]王晓原,张敬磊,杨新月.交通流数据清洗与状态辨识及优化控制关键理论方法[M].北京:科学出版社,2011.
[4]杨兆升,王伟,董升,等. GPS/DR组合定位系统信息融合技术[J]. 吉林大学学报(工学版),2008(3):508-513.
[5]姜桂艳,常安德,吴超腾. 基于GPS浮动车的交通信息采集方法[J].吉林大学学报(工学版),2010(4):971-975.
[6]钱寒峰,林航飞,杨东援.浮动车车速处理分析系统中的数据融合技术[J].计算机工程与应用,2007,43(31): 230-232.
[7]PAN S,JIANG B,ZOU N,et al. Average Travel Speed Estimation Using Multi-Type Floating Car Data[C]//Information and Automation (ICIA),2011 IEEE International Conference. Shenzhen:IEEE,2011.
[8]廖孝勇.浮动车交通参数检测及在道路交通状态分析中的应用研究[D].重庆:重庆大学,2011.
[9]TREIBER M,KESTING A,WILSON R E. Reconstructing the Traffic State by Fusion of Heterogeneous Data[J]. Computer‐aided Civil & Infrastructure Engineering,2009,26(6):408-419.
[10]WANG Z,DU Y,WANG G,et al. A Quick Map-Matching Algorithm by Using Grid-Based Selecting [C]//International Workshop on Geoscience and Remote Sensing ETT and GRS.Shanghai:IEEE, 2008.
[11]吴伟.分布式并行地图匹配系统研究与实现[D].长沙:中南大学,2012.
[12]余洋.云计算环境下的大样本浮动车数据处理关键技术研究[D].武汉:武汉大学,2010.
[13]杨喆.大规模浮动车数据处理的研究与实现[D].合肥:中国科学技术大学,2010.
[14]BOUILLET E,RANGANATHAN A,SCALABLE. Real-Time Map-Matching Using IBM's System S[C]// Eleventh International Conference on Mobile Data Management.Kansas:IEEE,2010.
[15]XIAO GANG H,YUE FENG L,LEI Y,et al. Parallel map matching algorithm based on multi-core and MPI[C]//Remote Sensing, Environment and Transportation Engineering (RSETE),2011 International Conference.Nanjing:IEEE,2011.
[16]CHANG A,JIANG G,NIU S. Traffic Congestion Identification Method Based on GPS Equipped Floating Car[C]//Intelligent Computation Technology and Automation (ICICTA),2010 International Conference.Changsha:IEEE,2010.
[17]YUE Y,ZOU H X,Li Q Q. Urban road travel speed estimation based on low sampling floating car data [C]//International Conference of Chinese Transportation Professionals (ICCTP),2009 International Conference. Harbin:IEEE,2009.
[18]OU Q,VAN LINT J W C,HOOGENDOORN S P. An integrated algorithm for fusing travel times, local speed and flow[C]// Information Fusion (FUSION),2010 Conference.Edinburgh: IEEE,2010.
[19]JENELIUS E,KOUTSOPOULOS H N. Travel time estimation for urban road networks using low frequency probe vehicle data[J]. Transportation Research Part B Methodological,2013, 53(4):64-81.
[20]RAHMANI M,JENELIUS E,KOUTSOPOULOS H N. Non-Parametric Estimation of Route Travel Time Distributions from Low-Frequency Floating Car Data[J]. Transportation Research Part C Emerging Technologies,2014,58(1):343-362.
[21]RAHMANI M,JENELIUS E,KOUTSOPOULOS H N. Floating Car and Camera Data Fusion for Non-parametric Route Travel Time Estimation[J]. Procedia Computer Science,2014,37(1):390-395.
[22]陈仕骁.基于浮动车的城市路段平均行程时间估计研究[D].杭州:浙江工业大学,2012.
[23]EHMKE J F,MEISEL S,MATTFELD D C. Floating car based travel times for city logistics[J]. Transportation Research Part C Emerging Technologies,2012,21(1):338-352.
[24]CHEN QING. Study on the technology of traffic state identification for urban road based on GPS equipped floating car[D].Xi′an: Chang an University,2009.
[25]刘俏.基于浮动车技术的城市道路网状况研究[D].武汉:武汉理工大学,2013.
[26]田世艳.基于GPS的城市道路交通状态实时判别技术研究[D].广州:华南理工大学,2012.
[27]吴佩莉,刘奎恩,郝身刚,等.基于浮动车数据的快速交通拥堵监控[J].计算机研究与发展,2014(1):189-198.
[28]张存保,杨晓光,严新平.基于浮动车的交通信息采集系统研究[J].交通信息与安全,2006,24(5):31-34.
[29]赵慧,于雷,郭继孚,等.基于浮动车和RTMS数据的动态OD估计模型[J].交通运输系统工程与信息,2010(1):72-80.
[30]ZHANG Y,QIN X,DONG S,et al. Daily O-D Matrix Estimation Using Cellular Probe Data[C]// In Transportation Research Board 89th Annual Meeting. Washington,D.C.:Transportation Research Board,2010.
[31]CAO P,TOMIO M,TOSHIYUKI Y,et al. Bilevel Generalized Least Squares Estimation of Dynamic Origin-Destination Matrix for Urban Network with Probe Vehicle Data[J]. Transportation Research Record Journal of the Transportation Research Board,2013, 25(2333):66-73.
Profile of Application of Floating Cars in Urban Intelligent Traffic System
RUAN Wei1, 2, FU Jiansheng1, WANG Chuanjiu1, LIU Mengyi2
Abstract:This paper conducts progressive conclusion and summarization for application of the floating car technology in urban intelligent traffic system in the sequence of floating car data processing, floating car based estimate of section speed, estimate of travel time, recognition of traffic states and estimate of dynamic road network OD, and probes into the insufficiency in present research and outlooks the future research.
Keywords:floating car; urban intelligent traffic system; parameter estimate; condition identification
文章编号:1009-6477(2016)02-0121-06
中图分类号:U491.2
文献标识码:A
作者简介:阮巍(1989-),男,河南省焦作市人,硕士研究生。
收稿日期:2015-08-17
基金项目:重庆市“151”科技重大专项(cstc2013jcsf-zdzxqqX0003)
DOI:10.13607/j.cnki.gljt.2016.02.027