机器人在角焊缝中的应用
2016-05-14张文明刘占起王新宇
张文明 刘占起 王新宇


摘 要:随着国内工业化的发展,自动化、智能化成为当前发展的主要方向。本文使用机器人示教方法对管板角焊缝试件进行焊接,解释了示教过程并分析了试验结果。
关键词:机器人;角焊缝;自动化
DOI:10.16640/j.cnki.37-1222/t.2016.04.194
0 引言
本文以管板角焊缝为例,因为管板角焊缝结构复杂,焊接工作量大,对焊工要求高而且长时间焊接对焊工身体健康造成一定伤害,而且焊接效率也无法提高。所以,需要使用机器人来代替人工来焊接角焊缝,这样不仅能提高焊接效率而且也能改善工人劳动环境并减小了工人的劳动强度,还能为公司带来更大的利益。因此,为了改善这一状况,基于本试验编写了机器人在角焊缝中应用,为公司提供一定的参考。
1 管板试件的焊接工艺
1.1 试件材料
选用目前大部分工厂使用的Q345钢材,管的直径为160mm厚度为5mm,底板的厚度为5mm,不开坡口进行焊接[1]。
1.2 焊接前处理
焊接前,首先要清理焊缝边缘25mm范围内的油污、铁锈等杂物。清理完之后,组对焊缝,将组对好的焊缝进行定位焊接,根据管材直径选择6个定位点并且是对称分布,每个点的大小为20mm,均匀分布在圆的四周。焊接环境在室内,温度为34°,因此不需要对工件进行预热处理。
1.3 焊接参数的选择
焊接参数是焊接工艺中最重要的步骤,本实验通过对焊接电流、焊接电压、焊接速度等参数[2]的调节,经过反复试验后,最终选取一组合适的焊接参数,其具体选择的参数如下表1所示。
2 机器人示教步骤
机器人示教也是决定焊接质量的关键因素,然而,调节焊接机器人的姿态和焊接路径是其重中之重[3],所以,本实验对调节机器人姿态和焊接路径进行了详细说明,其步骤如下所示:
(1)首先打开机器人总电源,等待机器人初始化完成。
(2)使用示教盒调节机器人姿态[4],找到8个合适的点编程如图1所示。
(3)示教仿真[5],检查是否符合实际的焊接路径。
(4)检查合格后,在示教盒上设置焊接参数如图2所示。
(5)将示教模式改为执行模式,将启动开关打开,机器人开始焊接。
(6)焊接结束,关闭气瓶和电源。
3 试验结果与分析
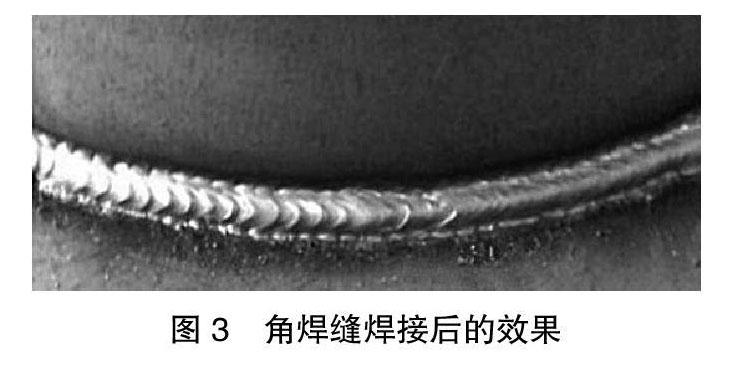
根据上面选择的焊接参数和机器人路径的规划进行焊接后,机器人在焊接过程中运行良好,与试验前规划路径一致,没有出现断点和偏差,说明程序设计正确。由于焊接参数选择合理,焊接后的焊缝,外观成形良好,焊接波纹均匀,外观达到焊接质量要求。焊脚出没有咬边等缺陷,所以焊缝处的应力集中很小,提高了力学性能,达到工厂焊接质量要求。焊接完成后的效果如图3所示:
4 试验结论
(1)机器人在线示教编制的程序正确,并通过实际焊接检验,没有出现奇异点和断点等问题,为程序编制提供了一定的参考价值。
(2)根据焊接后,从焊缝成形情况看,没有出现咬边、焊瘤、烧穿等缺陷,所以焊接参数的设置与选择都是比较合理的。
(3)机器人焊接环境对人体伤害很小,因为在焊接过程中,人可以离开一定的距离,从而减少弧光、粉尘、烟雾对人的伤害。
参考文献:
[1]李月玲,高彩霞.CO2气体保护焊焊接工艺试验与应用[J].石油和化工设备,2012,15(06):34-36.
[2]李红涛,胡新阳,宋绪丁.桥梁钢Q345焊接接头疲劳裂纹扩展速率研究[J].热加工工艺,2014,12(23):39-41.
[3]新松工业机器人通用操作手册[S].28-60.
[4]付晓龙,何建萍,王付鑫. 焊接机器人轨迹规划的研究现状[J]. 轻工机械,2015,33(02):111-112.
[5]朱进满. 焊接机器人的应用[J].现代制造,2005(12):43-45.
作者简介: 张文明(1959-),男,沈阳人,学士,教授,研究方向:焊接技术及自动化。
