垂直平面清洗机清洗装置设计
2016-05-14王逸云

摘 要:垂直平面清洗机对高层建筑墙面进行清洗的关键技术是清洗机的载体方式及清洗技术。文章设计了一种简单实用的垂直平面清洗机的清洗装置、对滚刷系统、水循环系统、清洗洁面装置、清洗工艺、清洗运动系统和动力传动系统等方面进行了系统的设计分析。该机器动作平稳,清洗干净,工作效率高,能够替代清洁工高空作业,极具推广应用价值。
关键词:清洗装置;垂直平面;结构设计
在高楼林立的今天,高层建筑外墙的清洗已成为了热点问题。传统清洁工人对高层外墙进行清洗,虽然简单易行,但危险系数相当危高,高空的强气流使人很容易产生晃动,工作环境恶劣,属于高空极限作业,对人身安全及其玻璃墙壁都有很大的威胁。在国外,许多学者对垂直平面清洗机进行了研究。日本BE公司[1]成功研制的了一种固定轨道式自动擦窗机器人,自动化程度十分高;德国的Fraunhofer研究所[2]研制了一种名为SIRIUSC壁面清洗机器人;美国国际机器人公司[3]研制了用于清洗摩天大楼的爬壁机器人“Sky Washer”。国内相比国外来说发展较晚,从1975年后,才掀起研制机器人的热潮。而目前一些国家和地区已经通过立法对包括擦窗作业在内的人工高空攀爬进行了限制。因此此时急需要一种能够代替人工完成高层建筑清洗工作。
1 清洗装置系统方案设计
清洗装置的系统要求具有动作平稳、清洗干净、操作简单、体积较小、重量较轻、节约能源、清洗速度快、不损坏被清洗物、无污染等特性。根据现有的要求,通过给定设计任务将其抽象化,罗列出各种输入信号以及实现的结果,用黑箱图表示出来。从黑箱图中确定清洗装置实现各项功能的转化工作原理。在经过设计分析过程后,初步确定设计的垂直平面清洗机清洗装置的总体布局图,垂直平面清洗机清洗装置的总体布局图如图1所示。
2 清洗机构设计
清洗机构是垂直平面清洗机清洗装置的核心部分,主要设计的部分由滚刷系统、水循环装置、清洗洁面装置等组成。而且清洗机在工作的时候要保证不能把玻璃或者瓷砖刮伤、腐蚀或者留下明显的水渍斑点等,并且要求不能对环境造成污染,清洗效率要高,因此这部分清洗机构的好坏直接决定了垂直平面清洗机清洗装置的好坏,对于垂直平面清洗机的清洗效率的高低级清洗效果的好坏起着关键的作用。
滚刷系统由电机、同步带及同步带轮、滚刷等组成。根据实际的需要选择电机型号为MY1025,额定功率350w,额定转矩2650N/m;由于具有传动噪声小、不需要润滑的特点且具有良好的缓冲传动冲击和振动的作用,因此选用同步带及同步带轮;滚刷分为两层,分别为轴上胶粘一层尼龙筒壁和尼龙筒壁上交错穿插的猪鬃构成。
水循环装置的使用不仅能够起到节约水的作用,同时减少了对环境的污染,利用真空发生器、过滤器、污水收集器、喷头、水泵、精过滤网、粗过滤网等组成了水循环装置。
在垂直平面清洗机清洗装置清洗墙面时,清洗过后的墙面肯定会或多或少的留有一点水渍,这样的话不仅仅会使垂直平面清洗机清洗装置在上面打滑和影响垂直平面清洗机清洗装置的工作效率,而且水还会沿着墙壁向下流,让楼下的行人很不愉悦,特别容易滴污渍在别人身上。为了解决这个问题,作者在清洗装置的滚上四周都安装有橡胶做的刮板,材料选用的是弹性高和耐磨性好的橡胶,这样在垂直平面清洗机清洗装置清洗过的地方就不会留下污渍或者水迹。
3 吸附及运动系统设计
为了保证垂直平面清洗机能够在垂直平面上正常的工作,必须保证其能够可靠地在垂直平面上吸附。由于垂直平面清洗机清洗装置清洗的高层外墙的装饰材料一般是玻璃瓷砖等一些非导磁料,因此采用真空吸盘配合真空发生器使用,考虑到安全性,采用多个吸盘组合的方式。经过计算选择直径为Φ40mm的Festo真空吸盘。清洗装置在工作时需要上下运动,此时,选择合理的推动方式显得尤为重要。通过对液压推动,气压推动两种方案进行对比选择气压推动作为清洗装置的运动输出。气缸选用DONT东特MAL32×1000铝合金迷你气缸。
气缸参数:动作型式为复动型,工作介质为经过反复过滤的压缩空气,使用压力范围为0.15~1MPa,使用调速范围为30~800mm/s。
4 整机设计
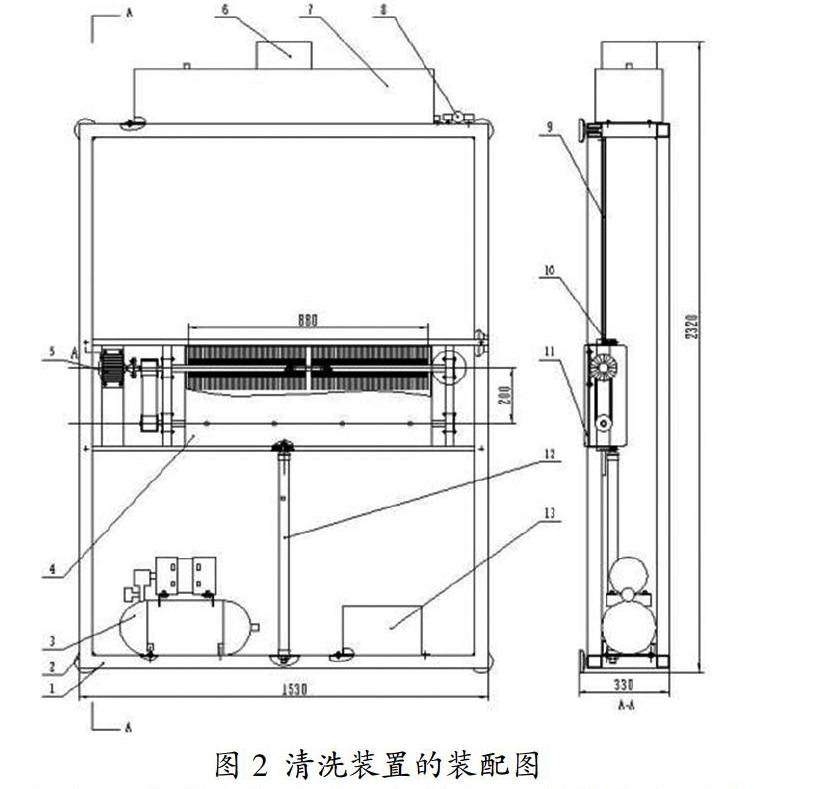
通过完成对垂直平面清洗机清洗装置的运动机构设计、清洗系统设计以及吸附系统的设计,最终尺寸为2320mm×1530mm×330mm。
其总装配图如图2所示。
5 结束语
针对垂直平面清洗机的清洗装置,从滚刷系统、水循环系统、清洗洁面装置、清洗工艺、清洗运动系统和动力传动系统等多方面进行系统的设计分析。结果表明:该机器动作平稳,清洗干净,工作效率高,能够替代清洁工高空作业,极具推广应用价值,同时为垂直平面清洗机的进一步研究提供了参考。
参考文献
[1]Shinji Naito. Wall surface robot with Magnetic crawlers[J].Journal of the robotics society of Japan,2007,10(5):50-52.
[2]胡启宝.多吸盘式玻璃幕墙七夕机器人本体设计[D].上海:上海交通大学,2007.
[3]杨建元.吸附性壁面攀爬机器人研究[D].西安:西北工业学院,2007.
作者简介:王逸云(1995-),男,四川成都人,西华大学机械工程学院2012级本科学生,研究方向:机械设计制造及自动化。
