限位器臂杆结构与侧门限位能力的计算应用
2016-05-14丁光学
丁光学


摘 要:通过建立汽车侧门限位系统数学模型和计算模块,将限位系统3D数据和计算模块紧密联系,然后利用CATIA和EXCEL软件二次开发编制出操作程序。该程序可以实现批量点的数据自动导入,使计算模块准确获得输入并输出结果,让复杂的侧门限位能力设计计算和设计校核过程变得简易。
关键词:汽车侧门;限位能力;二次开发;计算模块;应用
引言
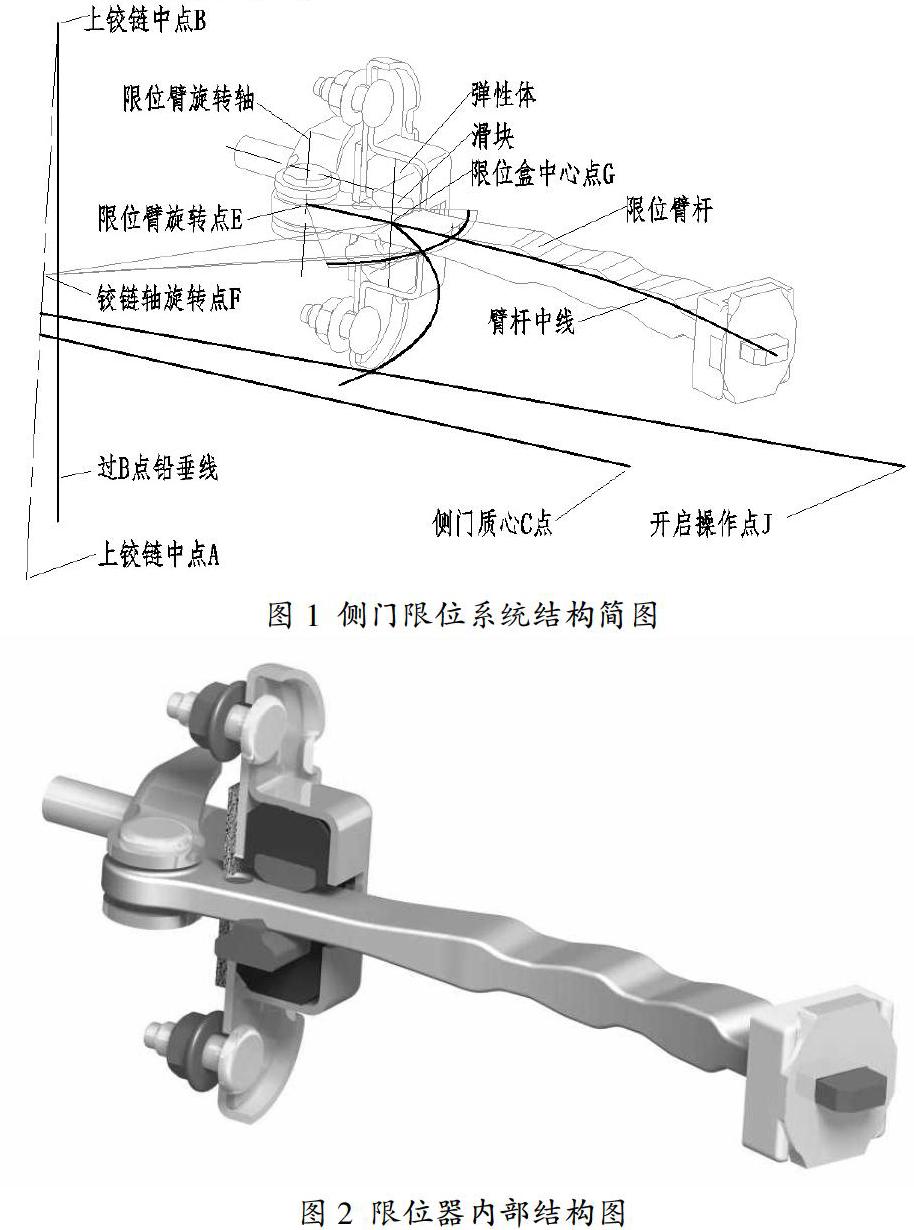
在侧门限位系统中,关键部件有:限位器、铰链、侧门总成和开启把手。其中铰链一侧紧固在车身上,另一侧紧固侧门总成上;限位器安装支架紧固在车身上,限位器盒紧固在侧门总成上。侧门总成围绕铰链轴在限位器控制的开启范围内旋转。限位臂杆坡度结构产生不同大小的阻力,提供侧门舒适的开闭力度,同时保证侧门开闭安全性。力学结构简图见图1,图中隐藏了侧门总成和车身结构,图2是限位器内部结构图。
侧门限位力特性是通过侧门质量中心位置、侧门重量、铰链轴综合倾角、开启点位置、限位器臂杆坡度、限位器弹性体弹性系数以及滑块与限位臂的摩擦系数等因素通过综合计算获得。对于侧门限位力的计算,业内常规的设计方法是通过铰链轴、限位器旋转轴、限位器盒中心点以及限位器安装平面等四个元素,利用作图方法绘制而成,付凯已经编制出软件[1],一键完成臂杆中线的制作过程。
这里有一个问题:一旦上述四个元素确定,臂杆中线是唯一的,但在实际设计过程中,由于受到限位器周边空间的制约,即使四个元素已经确定,为了避让周边零件还是要修改臂杆中线,这称为非常规设计方法,这种方法设计出的限位臂,不能按照常规方法进行计算。
针对限位系统布置方案,从中提取轨迹点坐标并导入到计算模块,获得对应的操作力特性以及满足通用规范的程度[2]。鉴于侧门限位能力计算过程的复杂程度,每个设计师都顺利进行列式计算是难以实现的,因此,如何建立一种快捷、通用的侧门限位能力计算和校核方法?如何固化这种方法并推广应用?是文章研究的对象。
1 基于侧门限位原理及力学分析
建立限位系统数据模型,见图3。具体实施步骤:
(1)提取限位器臂杆中线,过限位器盒中心点G作限位器旋转平面π,平面π与限位器旋转轴交于E点,中线和G点均在该平面内。
(2)将侧门开启角度微分成若干等份,分得越细,计算越准确(本方案每0.25°为等份),以F点为旋转中心,以G点为阵列对象,在最大开启角度范围内阵列G点,当侧门开启角度为θn时对应阵列点为Gn。
(3)在平面π内,以E点为圆心,以EGn为半径做圆弧交提取限位器臂杆中线于Gn',过Gn'作限位器旋转轴的平行线交限位器臂杆轮廓面与Gn",同理作出下一组交点Gn+1'、Gn+1"……。
(4)通过各点坐标,可依次计算出侧门开启θn角度时对应坐标:
Gn(xn,yn,zn);Gn'(xn',yn',zn');Gn"(xn",yn",zn");Gn+1(xn+1,yn+1,zn+1);Gn+1'(xn+1',yn+1',zn+1');Gn+1"(xn+1",yn+1",zn+1")。
(5)在△HGn"Gn+1"中,设HGn"=a;HGn+1"=b,Gn"Gn+1"=c。HGn"∥Gn'Gn+1",∠Gn+1"HGn"=90°,conωn=b/c,由此求出ωn,ωn是限位器滑块瞬时位置的单侧坡角度。在微分情况下,曲线Gn"Gn+1"和曲线Gn'Gn+1'可近似两点的直线距离,所以a、b、c分别由两点坐标计算获得。
(6)由瞬时位置的单侧坡角度ωn将限位器臂杆轨迹线(点)计算转化为限位器滑块中心点轨迹线(点),见图4,根据滑块接触面结构建立轨迹转化计算关系式,如图5所示,随着坡度的不同两轨迹线(点)随之改变:当|ωn|≤Ω1时,限位器滑块中。
心点轨迹线偏离限位器臂杆轨迹线的距离为:
(H-r)/cos|ωn|+ cos|ωn|*S /2-(H-r) *sin|ωn|+r
当Ω1<|ωn|≤Ω2-Ω1时,限位器滑块中心点轨迹线偏离限位器臂杆轨迹线的距离为R。
(7)限位滑块的受力分析见图6。由限位器滑块中心点轨迹线(点)偏离限位器旋转平面π的具体大小,如图3所示,考量限位器弹性体压缩量并进行其力学计算。
限位器限位能力计算:
弹性体压缩量=固定压缩量+过程压缩量;
弹性体压缩力F=弹性体弹性系数k*压缩量。
当开启过程以T1推动物体匀速运动时,斜面方向力平衡:T1*conωn=f+F*sinωn;垂直于斜面方向力平衡:N=T1*sinωn+F*conωn。
当闭合过程以T2推动物体匀速运动时,斜面方向力平衡:f=T2*conωn+F*sinωn;垂直于斜面方向力平衡:N=F*conωn-T2*sinωn。
摩擦力和正压力关系:f=μ*N。
T1=F*(μ*conωn+sinωn)/(conωn-μ*sinωn)
T2=F*(μ*conωn-sinωn)/(conωn+μ*sinωn)
限位器限开力=2*T开*sinψ*GF /l2
限位器限闭力=2*T闭*sinψ*GF /l2
水平车姿侧门闭合力=(l1*mg*sinγ-W0)/l2
水平车姿侧门开启力=-(l1*mg*sinγ+W0)/l2
最终开启操作力=限位器限开力+无限位器时侧门开启操作力[3]
最终闭合操作力=限位器限闭力+无限位器时侧门闭合操作力[3]
W0是铰链转动阻力矩;γ:铰链轴综合倾角,即铰链轴与Z轴夹角,(tan2γ=tan2α+tan2β,α铰链轴内外倾角,β铰链轴前后倾角);l1:侧门自闭力臂,是质量中心C点到铰链轴铅垂面的距离;l2:J点至旋转轴AB的距离,及操作力臂;GF:限位器盒中心点至旋转轴AB的距离;mg:侧门总重量;ψ是限位器盒中心点G围绕铰链轴的旋转臂与限位器安装面的夹角。
2 建立限位能力的计算模块
(1)将涉及限位能力设计的参数录入计算输入区域,见图7。
(2)将开启角度作为自变量函数,对照第一章的分析和计算内容,按照“各轨迹点导入区域”、“分类计算区域”、“计算结果”建立限位能力计算模块,见图8。
“计算结果”输出成开闭过程曲线图,见图9,这是二档限位器开闭过程曲线,通过计算输出可直接读取其开闭过程操作力大小及限位器臂杆坡度参数。
3 基于3D设计数据的特征点提取
图8中“各轨迹点导入区域“中包含数以千计的限位器臂杆结构的轨迹点坐标,手工提取并录入将非常耗时耗力,为了实现数据提取和定向导入至计算模块对应的单元格中,利用CATIA和EXCEL软件编制开发自动运行程序,实现一键完成全部操作过程,具体操作:
(1)在新建的part文件中,将提取的七个限位器布置元素粘贴在其中,如图10所示,其元素顺序和名称与制作过程相关,不可轻易更改。利用CATIA自带的“宏录制”功能,将整个轨迹点提取过程录制成“宏”文件,对录制后的“宏”文件进行编辑和整理,形成固定的执行程序《限位器臂特征点数据提取》。当面对新的七个限位器布置元素,再次执行《限位器臂特征点数据提取》时,则执行录制的步骤,却读取了新的元素值,最终绘制了新的轨迹点。
(2)选择一个新的限位器布置七个元素。执行《限位器臂特征点数据提取》瞬间获得各轨迹点参数见图11。
《限位器臂特征点数据提取》关键代码:
Sub CATMain1()
……
Set body1 = bodies1.Add()
Set shapeFactory1=p
art1.ShapeFactory
Set parameters1=part
1.Parameters
Set anyObject1= parameters1.Item("点.2")
Set circPattern1=sha
peFactory1.AddNewSurfac
icCircPattern'以铰链轴为转轴阵列"G点"
……
Set body2=bodies1.Add()
Set hybridShapeFactory1=part1.HybridShapeFactory
Set hybridShapePointExplicit1=parameters3.Item("点.1")'以E点为圆心,以各阵列点为圆上点,以π为支撑面作圆。
Set reference4=part1.CreateReferenceFromObject(hybridShapePointExplicit1)
body2.InsertHybridShape hybridShapeCircleCtrPt1
……
Set body3=bodies1.Add()
Set reference7=part1.CreateReferenceFromObject(hybridShapeCirc
leCtrPt1)
Set hybridShapeCurveExplicit1=parameters5.Item("曲线.1")'作所作圆与限位器臂杆中线交点
Set reference8=part1.CreateReferenceFromObject(hybridShapeCur
veExplicit1)
body3.InsertHybridShape hybridShapeIntersection1
……
Set reference9=part1.CreateReferenceFromObject(hybridShapeIntersection1)
Set hybridShapeLineExplicit2=parameters6.Item("直线.2")'过各中线交点作平行于限位器旋转轴直线(默认一侧)
Set reference10=part1.CreateReferenceFromObject(hybridShapeLineExplicit2)
Set hybridShapeDirection1=hybridShapeFactory1.AddNewDirection(reference10)
body3.InsertHybridShape hybridShapeLinePtDir1
……
Set body4 = bodies1.Add()
Set reference11=part1.CreateReferenceFromObject(hybridShapeLinePtDir1)
Set hybridShapeSurfaceExplicit1=parameters7.Item("曲面.1")'所作直线与限位器臂杆轮廓一侧交点
Set reference12=part1.CreateReferenceFromObject(hybridShapeSu
rfaceExplicit1)
body4.InsertHybridShape hybridShapeIntersection2
……
End Sub
4 特征点数据导入并完成计算
结合CATIA和EXCEL两个软件中的二次开发平台,开发出《限位器臂特征点导入计算模块》自动执行程序,将图11提取的轨迹点,实现一键导入至计算模块如图8中所示的“各轨迹点导入区域”。具体步骤:(1)在CATIA软件中,按照轨迹类型分别另存成igs格式文件;(2)利用CATIA软件中的Digitized Shape Editor模块,分别将另存的igs点云文件转化为asc格式文件;(3)在EXCEL软件中将各asc格式文件导入至设置的EXCEL过度文件中;(4)计算模块读取EXCEL过度文件对应输入区域数据;(5)完成从3D数据中传来的坐标数据读取;(6)轨迹点数据导入计算模块,立即呈现该方案的全部计算结果,并将计算结果输出为过程曲线。
