基于泰森多边形的UWB危化品堆垛仓储货物定位技术
2016-05-11戴波李志超刘学君吕昕杨光北京石油化工学院信息工程学院北京067北京化工大学信息科学与技术学院北京0009
戴波,李志超,,刘学君,吕昕,,杨光(北京石油化工学院信息工程学院,北京067;北京化工大学信息科学与技术学院,北京0009)
基于泰森多边形的UWB危化品堆垛仓储货物定位技术
戴波1,李志超1,2,刘学君1,吕昕1,2,杨光1
(1北京石油化工学院信息工程学院,北京102617;2北京化工大学信息科学与技术学院,北京100029)
摘要:目前我国危化品仓储多采用码垛堆放的存储方式,对于垛距、墙距、顶距、柱距等缺少有效的技术监管手段。在现有的定位技术中,UWB技术可以较好地监测货物码垛位置,但其精度仍无法满足当前监管要求。利用UWB定位技术监测危化品仓储中货物的码垛位置,并从UWB技术的定位原理和影响定位精度的主要因素出发,结合危化品码垛仓储的特点,提出泰森多边形矢量校正法,对危化品仓储货物进行更加精准的定位。实验证明,泰森多边形矢量校正法能够有效提高UWB定位精度,适用于危化品仓储的货物定位和监管。
关键词:危化品仓储;安全;UWB技术;算法;TOA估计;控制
2015-12-03收到初稿,2015-12-14收到修改稿。联系人及第一作者:戴波(1962—),男,教授。基金项目:北京市安全生产监督管理局项目。
引 言
危险化学品不同于一般货物,因具有易燃性、毒性、腐蚀性等特点[1],其存储对仓库选址、库内码垛方式、墙距、货距、温度、湿度等都有严格要求。目前,我国大部分危化品仓库还停留在低水平、低层次、人工操作的水平,库房大都采用码垛堆放的存储方式,企业对仓库码垛方式和安全预警自行布置,缺少有效的技术监管。要满足传统码垛式危化品仓库在利用率、货距、墙距、监控等方面的需求,并准确掌握仓储内货物的位置信息,就需要通过现代室内定位技术来实现。
随着定位技术的不断发展,各种无线定位技术需要逐步满足定位精度高、抗干扰能力强、发射功率及能耗低等条件[2]。在危化品仓储环境中,还要求定位系统具有分米级甚至厘米级别的定位精度,因为相对于普通货物仓储,危化品仓储对货物间距要求更为严格。我国《常用危险化学品贮存通则》对危化品贮存的五距给出了明确的规定:隔开贮存、隔离贮存和分离贮存的垛距、墙距限制为0.3~0.5 m。目前传统技术并不能很好地满足这些要求,而超宽带(UWB,ultra-wide band)技术就可以相对容易地进行室内精确定位[3],更加适合于危化品仓储环境。但UWB定位系统在遮挡物较多的非视距(NLOS,non-line of sight)环境中,性能会明显恶化[4]。当UWB系统在危化品仓库中工作时,会受到遮挡和干扰,定位出现偏离真实坐标的情况,加大定位误差。针对此类问题,对UWB技术的定位原理和定位误差进行分析,提出了一种基于泰森多边形矢量校正法的UWB危化品堆垛仓储定位技术。实验表明,该方法可有效提高危化品仓储中堆垛货物的定位精度,适用于危化品仓储的货物定位监管。
1 UWB定位误差分析
1.1 UWB定位误差
超宽带(UWB)是一种无载波通信技术,它利用纳秒至皮秒级的非正弦波窄脉冲传输数据,因此所占的频谱范围很宽[5]。目前最主要的UWB定位技术方法为基于到达角度(AOA,angle of arrival)的估计算法和基于到达时间(TOA/TDOA,time/time difference of arrival)的估计算法。其中AOA方法通过角度信息获得信号收发两端的方位来完成定位,其接收节点通过天线阵列感知发射节点信号的到达方向,计算出接收节点和发射节点之间的相对方位[6]。AOA定位精度有限,而且天线阵列和波束赋形技术的使用会增加功耗、硬件尺寸和成本。目前使用天线阵时域平滑的方法,可将AOA精度提升到3°左右[7],但仍难满足高精度定位的要求。TOA/TDOA方法利用信号收发两端的距离来实现定位,可以通过对UWB接收信号的多径检测或参数估计的方式求得。由于UWB信号具有良好的时间分辨率,TOA/TDOA估计方法能很好利用这一特性,因而理论上能获得更高的定位精度[8]。相比而言,TOA/TDOA方法在功耗需求上小于AOA方法,且AOA方法不适用于经过强反射的多径UWB信号。由此可见,UWB定位技术的关键是TOA/TDOA技术的研究应用。
在目前的TOA估计方法中多径检测是最为常用的方法,因为直射路径(DP,direct path)总是多径信号中最先到达的,检测多径分量中的DP来确定收发两端的TOA,是最为认可的和最为合理的方式[9]。UWB定位误差来源主要有两方面:其一是UWB信号的多径效应,因为其他多径成分会干扰到DP的检测;其二是UWB信号的非视距传播[10]。因此UWB定位误差就转变为DP的检测问题和NLOS环境下的定位问题。在视距(LOS,line of sight)环境下,DP就是多径成分中的最强路径(SP,strongest path),通过检测SP即可找到DP;但是在NLOS环境中,DP往往不再是SP,进一步增大了DP检测的难度[11]。
如何解决DP的检测和非视距传播问题,一直是学者研究的重要课题。文献[12]最早对相干TOA估计算法进行研究,提出了基于CLEAN算法的循环相关DP检测算法,该算法的精确度较高,但由于大量的单径幅值估计及校正计算,使得该算法收敛速度很慢。文献[13]提出了三阶累计量方法,直接从匹配滤波中提取DP,利用匹配滤波输出的峰值位置来计算DP时延,但算法仅适用于LOS环境。文献[14]提出了一种基于匹配滤波的输出门限检测的三步走TOA估计算法,运算量适中,但却牺牲了定位精度。
由于UWB单一定位的局限性,文献[15-16]提出了TOA与AOA结合的测距方法,单一的TOA方法得到的是笛卡儿坐标系下的距离信息,至少需要3个参考节点才能实现定位,而TOA与AOA结合测距算法,等效于将节点置于极坐标系下,如果能得到距离和角度信息,则最少需要一个节点即可实现定位。
目前的改进算法虽然很多,但由于实际环境中总会存在遮挡,在多径干扰和非视距环境中,DP检测的准确度会受到影响,改进的检测DP算法仍存在局限性;使用TOA和AOA联合定位虽然能提高定位精度,但在严重的非视距条件下,定位误差依然很大[17]。为此,近几年很多文献将协同定位作为进一步提升定位精度的手段,进行了卓有成效的研究。UWB协同定位就是利用各节点间定位参数、状态更新、位置解算在定位系统的交互关系,得到目标节点的定位信息。其中文献[18]提出SPAWN算法并使用因子图建立网络模型;文献[19]讨论了协同定位的应用与性能限制因素。利用协同定位的思想是在非视距条件下进一步提高定位精度的较好选择。
1.2 定位误差分析
UWB不使用载波,直接进行基带传输[20],经过多径传播,接收端信号表示为
式中,Pmp(t)为单个脉冲经由多径传播之后的接收信号;P(t)为单位能量的单径脉冲波形;ai和τi分别为单径幅度增益和到达时间;j为帧序号;Tf为帧周期;Tc为码片持续时间;cj为跳时序列;dj为随机极性序列,dj∈{± 1};n(t)为均值为零,双边功率谱密度N0/2和方差为2σ的高斯白噪声。
因为TOA估计算法的定位是通过测量UWB信号从发射端到接收端的时间差来完成的,未知节点的真实值和估计值之间的偏移都可以归结为信号时延估计(TOF,time of flight)。忽略时间抖动带来的影响,TOF估计可以简单表示为
式中,c为光速;PRT、PUN分别为接收端和未知节点UN位置;e为误差;eMP、eNLOS分别表示相互独立的多径误差和非视距误差。
多径传播中会使信号中直达分量的衰减因子变为复高斯随机变量,导致DP和SP被延迟检测或误检。根据对测量数据的统计分析,归一化多径误差γMP可建模成高斯分布

式中,μMP、δMP为γMP的均值和标准差。引入对数距离因子lg(1+d),则eMP可表示为

非视距传播中由于遮挡,DP信号衰减大,脉冲会引入附加时延,文献[21]中通过实测数据分析得出非视距误差符合指数分布规律

式中,μNLOS为指数分布均值。在非视距环境中,由于附加时延因素,DP检测总会存在延迟,eNLOS常表现为正偏差。
非视距环境下,上述公式中eMP和eNLOS总会存在并导致严重的误差,因此采用参考节点(RN,reference node)与参考节点的协同定位方式是较好的解决方法。其基本思想是进行位置解算时以某个RN作为主站来处理各个相邻从站RN测得的定位信息。如果主站位置信息准确,主站与从站关系确定,可以有效修正和补偿从站位置信息,减小定位误差。此时误差可以表示为

式中,eβ为补偿误差。
2 基于泰森多边形矢量校正法的UWB定位研究
2.1 基于泰森多边形的误差分析
泰森多边形法,又称为垂直平分法或加权平均法,最早是由荷兰气候学家A.H.Thiessen提出的根据不规则分布气象站降雨量来计算平均降雨量的方法,是用空间内某一点来代替相邻区域的整体趋势或平均值的一种数学方法。为解决多径干扰和非视距环境中UWB定位误差较大的问题,基于协同定位的思想,提出一种泰森多边形矢量校正算法。根据UWB定位原理,距离相近的UWB标签发出信号后会由相同的传感器检测并测距,DP检测、信道环境及其TOA估计算法相同,导致其误差和坐标偏离趋势相似。因此,可以采用RN与RN的协同定位方式,即进行位置测算时,以某个RN作为主站,其余从属RN有着类似主站的属性,这样的RN设置有利于整个无线网络的控制或建立多跳结构。又因为多径误差符合高斯分布模型,因此任意一个标签的平均误差和偏移矢量可以反映出其相邻区域的整体趋势。所以,可以通过某一标签(主站)的测量位置与实际位置的矢量差来替代其周围区域的所有标签的偏移矢量趋势,将偏移矢量补偿给相邻的待测的标签,从而克服信号衰减带来的影响,减少偏移误差,提高定位精度。而所能替代的周围区域的具体范围大小就需要利用泰森多边形法计算出来。
泰森多边形法中,为了降低信道的噪声干扰,提高信噪比,会将每个参考节点在时间Tf上求平均,由式(1)知,对N个脉冲做平均运算得到的平均信号表示为

其中,nN(t)为n(t)的N次平均,其方差减小为σ2/N。将ravg(t)与本地模板信号做相关处理,得到

其对应的时延和幅值分别为τpeak和apeak。在无多径视距的情况下,最强径通常为DP,此时τpeak=τTOA,对信号求平均值降低了噪声,可以在一定程度上提高TOA估计精度。在多径通道中,多径误差符合高斯分布,对信号取平均值能够减小误差。

不考虑由TOA检测算法带来的误差,即假设门限TOA已经估计出了首条检测径(FTD,first detected path),式(4)中e可以表示如下

式中,τFDP为对接收信号中的DP相干TOA估计;τD为收发节点间直线距离的传播时延。泰森多边形矢量校正法将偏移矢量补偿给相邻的待测的标签,对误差e进行补偿,从而减小误差

式中,τβ为泰森多边形矢量法等效的补偿因子。
2.2 泰森多边形矢量校正算法
为分析研究危化品堆垛仓储环境中UWB定位性能,依托英国Ubisense7000 UWB定位系统,搭建了模拟危化品堆垛仓储的实验平台。Ubisense7000系统由位置固定的传感器、UWB标签和综合软件平台构成。如图1所示,Ubisense7000系统工作时,首先由标签向传感器发射UWB脉冲信号,传感器接收信号后,通过软件平台计算信号到达的时间差(TDOA)和信号的到达角度(AOA),确定出标签的位置。将UWB标签附着在需要监测的危化品货物上,便可从软件平台一端实现对其的定位和监管。如果将定位信息与货物尺寸信息结合,可实现对码垛堆放货物的三维重构,真实地还原其在仓库的位置、状态、间距等,从而实现现代化仓储的监管。实验室模拟的危化品堆垛仓储环境存在金属铁柜和金属方桌遮挡,导致UWB非视距传播,定位误差较大。
以O为原点建立参考坐标系,因为Ubisense7000系统的定位精度为0.15 m左右,所以建立的泰森多边形不应过小。为简便计算,本实验将随机点间隔定为0.6 m,随机点坐标为:(0.6, 0.6) (1.2, 0.6) (1.8, 0.6) (2.4,0.6) (3.0, 0.6) (3.6, 0.6) (0.6, 1.2) (1.2, 1.2) (1.8, 1.2) (2.4, 1.2) (3.0, 1.2) (3.6, 1.2) (0.6, 1.8) (1.2, 1.8) (1.8, 1.8) (2.4, 1.8) (3.0, 1.8) (3.6, 1.8) (0.6, 2.4) (1.2, 2.4) (1.8, 2.4) (2.4, 2.4) (3.0, 2.4) (3.6, 2.4) (0.6, 3.0) (1.2, 3.0) (1.8, 3.0) (2.4, 3.0) (3.0, 3.0) (3.6, 3.0) (0.6, 3.6) (1.2, 3.6) (1.8, 3.6) (2.4, 3.6) (3.0, 3.6) (3.6, 3.6)。
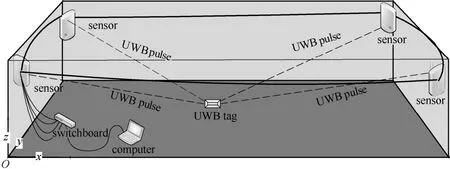
图1 Ubisense7000 UWB定位实验平台Fig.1 UWB Positioning experiment platform of Ubisense7000
将相邻各随机点连接形成三角形,作各边的垂直平分线,若干的垂直平分线便围成一个多边形,即泰森多边形。本实验得到的泰森多边形为规则矩形,将泰森多边形包含的唯一点设为参考点,如图2所示,其中每一个由虚线围成的矩形就是一个泰森多边形,矩形内的红色十字为参考点。根据UWB定位原理,距离相近的UWB标签发出信号后会由相同的传感器检测并测距,DP检测、信道环境及其TOA估计算法相同,导致其误差和坐标偏离趋势相似,可用其中某一点的偏移量代表附近的偏移趋势。根据泰森多边形原理可知,此时泰森多边形包含的唯一点(参考点)即可代表此矩形内其他标签的偏移趋势。在参考点处放置UWB标签,并记录参考点真实坐标与参考点测量坐标(文中坐标值均采用多次测量的平均值),参考点测量坐标与真实坐标之差记为误差矢量Am,待测点的误差,就可由Am近似替代。再将待测货物(待测点)附着UWB标签置于坐标系中,记录待测点真实坐标,如图2所示。
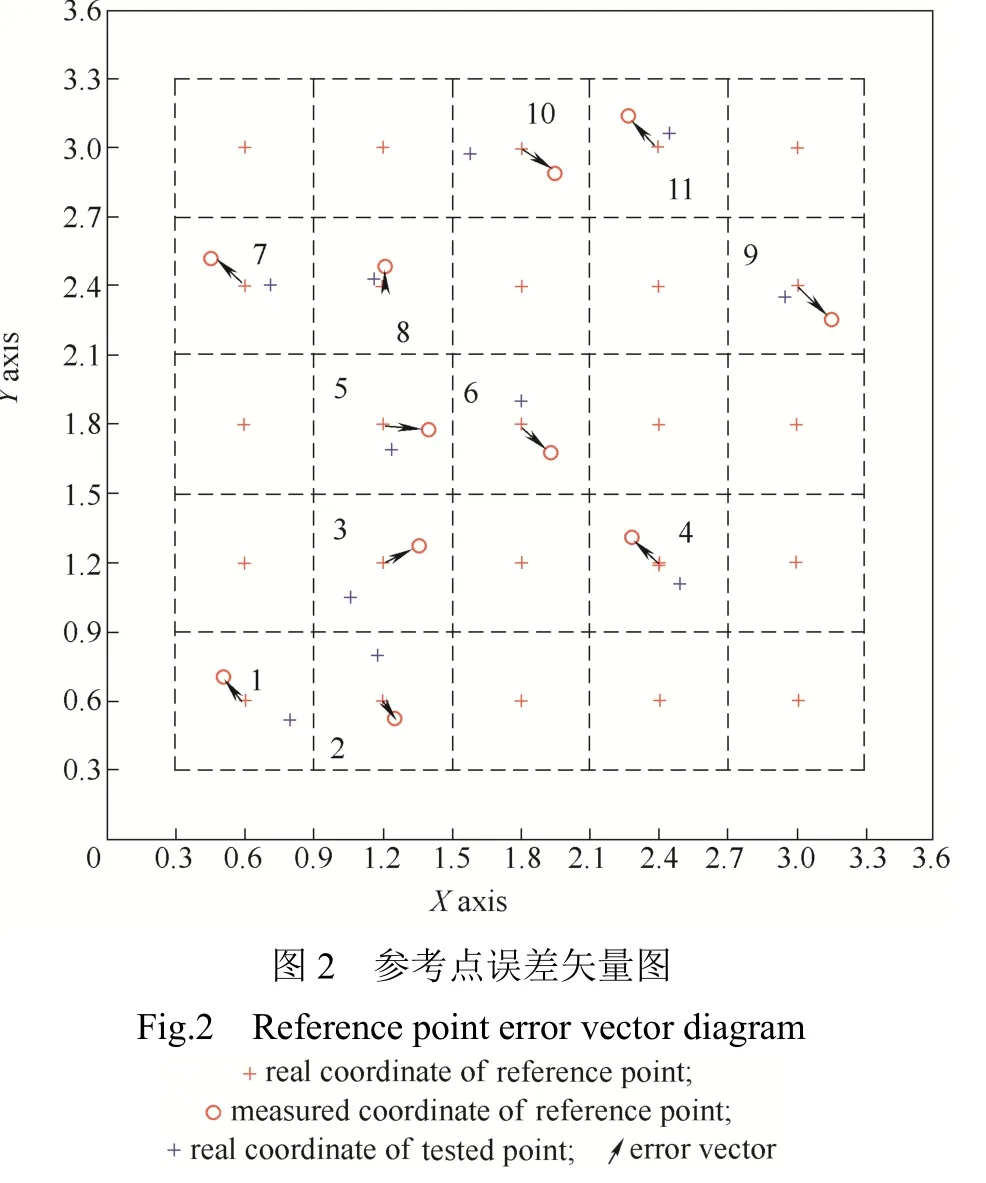
设参考点真实坐标为OPm、参考点测量坐标为ONm、待测点真实坐标为误差矢量计算方法为:各点坐标和误差矢量见表1。
将待测点测量坐标(校正前)记为OQm,待测点校正后坐标为采用此方法计算待测点的校正前后坐标,并与待测点真实坐标进行位置对比,如图3所示。

由图3中可见,采用泰森多边形法校正后,各个待测货物的定位精度均有所提升。为了验证定位精度提升的具体效果,将校正前后的待测点测量坐标到其真实坐标的距离进行对比,待测点校正前到实际值的坐标距离为|OQ−OR|,待测点校正后到实际值的坐标距离为|OQ′−OR|,具体数值见表2。
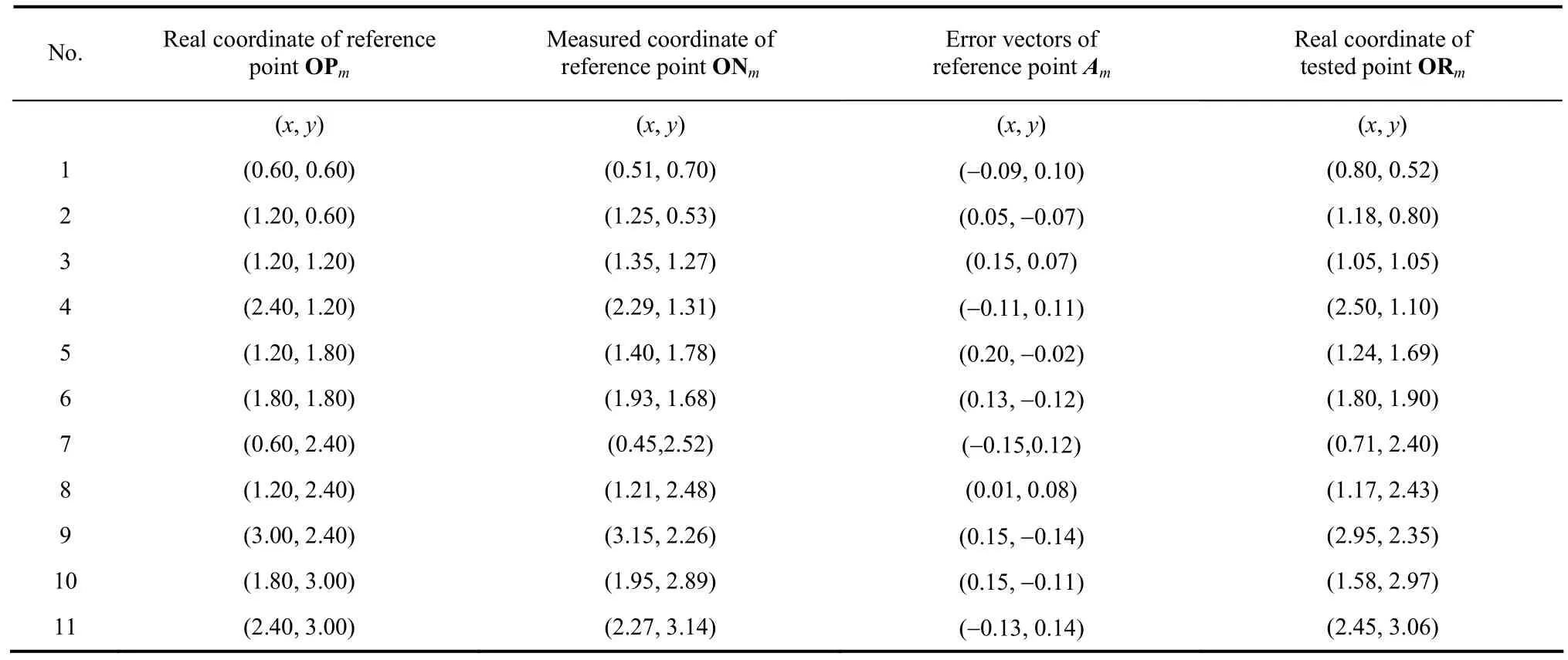
表1 各点坐标情况Table 1 Coordinates of each point
为了验证本算法,在上述25个泰森多边形中每个随机选择8个位置放置UWB标签进行上述试验,得到验证各组实验数据见表3。

表2 各待测点校正前后对比Table 2 Comparison of tested points before and after correction
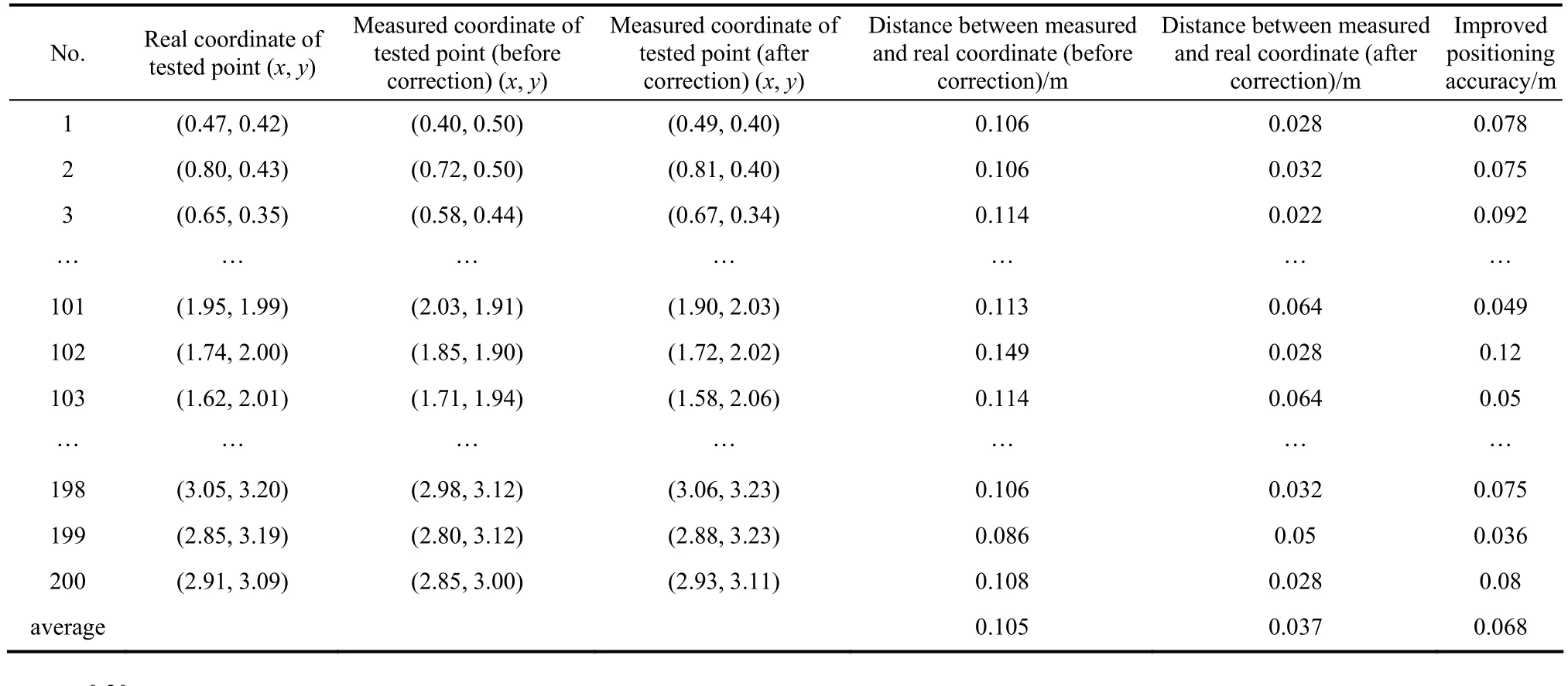
表3 验证各组校正前后对比Table 3 Comparison of other points before and after correction

图4 验证组定位精度提升值曲线图Fig.4 Diagram of improved positioning accuracy
以各待测点序号为X轴,各组定位精度提升的距离为Y轴,将200个点连接起来,得到各组定位精度提升曲线图,如图4所示。
3 结 论
UWB室内定位技术对于现代危化品仓储的建设和监管有着重要的现实意义。本文提出建设基于现代信息技术的危化品仓库,通过UWB定位技术
手段实现对危化品仓储的监管。从UWB定位的原理及其影响定位精度的因素着手,提出了泰森多边形矢量校正法,并依托Ubisense7000 UWB定位系统进行验证,表明该方法能有效改善危化品仓储堆垛货物的定位精度,实现危化品堆垛仓储的货物的有效监管。
References
[1] LIU J N, CHEN T, FAN D L, et al. Ranking and screening hazardous chemicals for human health in southeast China [J/OL]. Organic Chemistry Current Research, 2014, 3(1): 1000126. http://www.omicsonline.org/ open-access/ranking-and-screening-hazardous-chemicals-for-humanhealth-in-southeast-china-2161-0401.1000126.pdf.
[2] ABU-MAHFOUZ A M, HANCKE G P. An efficient distributed localisation algorithm for wireless sensor networks: based on smart reference-selection method [J]. International Journal of Sensor Networks, 2013, 13 (2): 94-111.
[3] WYMEERSCH H, MARANÓS, GIFFORD W M, et al. A machine learning approach to ranging error mitigation for UWB localization [J]. IEEE Transactions on Communications, 2012, 60 (6): 1719-1728. [4] XIAO Z, WEN H, MARKHHAM A, et al. Non-line-of-sight identification and mitigation using received signal strength [J]. IEEE Transactions on Wireless Communications, 2015, 14 (3): 1689-1702. [5] STEPHAN A, GUÉGUEN E, CRUSSIÈRE M, et al. Optimization of linear preceded OFDM for high-data-rate UWB systems [J]. EURASIP Journal on Wireless Communications and Networking, 2008, 10 (2):723-728.
[6] YU K, GUO Y J. Statistical NLOS identification based on AOA, TOA, and signal strength [J]. IEEE Transactions on Vehicular Technology, 2009, 58 (1): 274-286.
[7] AZARI A, ISMAIL A, SALI A, et al. A new super wideband fractal monopole-dielectric resonator antenna [J]. IEEE Antennas and Wireless Propagation Letters, 2013, 12 (5): 1014-1016.
[8] LEE J Y, SCHOLTZ R. Ranging in a dense multipath environment using an UWB radio link [J]. IEEE Journal on Selected Areas in Communications, 2002, 20 (9): 1677-1683.
[9] CASSIOLI D, WIN M Z, VATALARO F, et al. Low complexity rake receivers in ultra-wideband channels [J]. IEEE Transactions on Wireless Communications, 2007, 6 (4): 1265-1275.
[10] HANEDA K, RICHTER A, MOLISCH A F. Modeling the frequency dependence of ultra-wideband spatio-temporal indoor radio channels [J]. IEEE Transactions on Antennas and Propagation, 2012, 60 (6): 2940-2950.
[11] LEE J Y, YOO S. Large error performance of UWB ranging in multipath and multiuser environments [J]. IEEE Transactions on Microwave Theory and Techniques, 2006, 54 (4): 1887-1895.
[12] ALAVI B, PAHLAVAN K. Modeling of the TOA-based distance measurement error using UWB indoor radio measurements [J]. IEEE Communications Letters, 2006, 10 (4): 275-277.
[13] CHEHRI A, FORTIER P, TARDIF P M. UWB-based sensor networks for localization in mining environments [J]. Ad. Hoc. Networks, 2009, 7 (5): 987-1000.
[14] SHEN G, ZETIK R, HIRSCH O, et al. Range-based localization for UWB sensor networks in realistic environments [J]. EURASIP Journal on Wireless Communications and Networking, 2010, 4 (2): 50.
[15] TAPONECCO L, D'AMICO A A, MENGALI U. Joint TOA and AOA estimation for UWB localization applications [J]. IEEE Transactions on Wireless Communications, 2011, 10 (7): 2207-2217.
[16] NAVARRO M, NÁJAR M. Frequency domain joint TOA and DOA estimation in IR-UWB [J]. IEEE Transactions on Wireless Communications, 2011, 10 (10): 1-11.
[17] HANG Z H, ZHANG D J, GUO J J, et al. Multipath time delay estimation based on third-order cumulants [J]. Information and Electronic Engineering, 2009, 4 (7): 94-98.
[18] WYMEERSCH H, LIEN J, WIN M Z. Cooperative localization in wireless networks [J]. Proceedings of the IEEE, 2009, 97 (2): 427-450.
[19] SHEN Y, MAZUELAS S, WIN M Z. Cooperative network navigation: fundamental limit and its geometrical interpretation [J]. IEEE Journal on Selected Areas in Communications, 2012, 30 (9): 1823-1834.
[20] HE H K, SHI H S. Asynchronous UWB localization method and algorithm for multiple targets [J]. Journal of System Simulation, 2008, 20 (7): 1713-1715, 1733.
[21] XU J, MA M, LAW C L. Position estimation using UWB TDOA measurements [C]//Ultra-Wide Band, The 2006 IEEE 2006 International Conference on. Waltham: IEEE, 2006: 605-610.
研究论文
Received date: 2015-12-03.
Foundation item: supported by the Beijing Administration of Work Safety.
UWB location technology of hazardous chemicals stacking storage based on Thiessen polygon
DAI Bo1, LI Zhichao1,2, LIU Xuejun1, LÜ Xin1,2, YANG Guang1
(1College of Information Engineering, Beijing Institute of Petrochemical Technology, Beijing 102617, China;2College of Information Science & Technology, Beijing University of Chemical Technology, Beijing 100029, China)
Abstract:Currently, domestic hazardous chemicals tend to be stacked in the warehouse without effective methods of monitoring stacking distance, distance from the wall, zenith distance and column spacing. Compared with other positioning technology, UWB technology can get a relatively accurate position of goods, but not accurate enough to meet the existing regulatory requirements. Combining with storage characteristics of hazardous chemicals, the research analyses positioning principles and the main factors that affects positioning accuracy of UWB (ultra-wide band) technology and suggests to monitor positioning of hazardous chemicals in the warehouse by UWB technology. The Thiessen polygon vectors compensation method is proposed to improve the positioning accuracy of hazardous chemicals in the warehouse. It is proved by experiments that this method can effectively improve the positioning accuracy and is suitable for the positioning and monitoring of hazardous chemicals.
Key words:hazardous chemicals; safety; UWB; algorithm; TOA estimation; control
DOI:10.11949/j.issn.0438-1157.20151828
中图分类号:TN 98
文献标志码:A
文章编号:0438—1157(2016)03—0878—07
Corresponding author:Prof. DAI Bo, daibo@bipt.edu.cn
