基于UWB四参考点矢量补偿的危化品仓储堆垛货物定位方法
2016-05-11戴波吕昕刘学君李志超北京石油化工学院信息工程学院北京067北京化工大学信息科学与技术学院北京0009
戴波,吕昕,,刘学君,李志超,(北京石油化工学院信息工程学院,北京067;北京化工大学信息科学与技术学院,北京0009)
基于UWB四参考点矢量补偿的危化品仓储堆垛货物定位方法
戴波1,吕昕1,2,刘学君1,李志超1,2
(1北京石油化工学院信息工程学院,北京102617;2北京化工大学信息科学与技术学院,北京100029)
摘要:监控危化品仓储堆垛五距(堆距、墙距、顶距、柱距和通道距)是危化品仓储安全监管的重要课题,研究危化品堆垛货物的高精度定位技术,是通过三维重构方法对危化品堆垛方式安全进行自动化监控的前提。分析了危化品仓储环境中影响UWB(ultra wide band)定位精度的主要因素,提出一种基于UWB四参考点矢量补偿的危化品仓储堆垛货物定位技术。首先将待监测区域划分为矩形网格,并建立参考系,将各网格顶点设为参考点,获得参考点处UWB定位值的误差矢量,作为校正待测点的参考矢量;将危化品仓储中堆垛货物与UWB标签绑定,寻找标签所处网格,用该网格的四参考点矢量补偿方法对标签的测量坐标值进行校正,将校正后坐标作为堆垛的最终定位位置。经实验表明,该方法能有效改善危化品仓储堆垛货物的定位精度,适合于危化品仓储堆垛的五距监测。
关键词:堆垛;五距监测;安全;算法;控制;UWB定位;参考点
2015-12-28收到初稿,2016-01-11收到修改稿。
联系人及第一作者:戴波(1962—),男,教授。
Key words: stacking storage; five-distance monitoring ; safety ; algorithm ; control ; UWB locating; reference
引 言
危险化学品因其固有的毒性、易燃性、腐蚀性等危害,一旦发生事故,将对化工区域甚至周边地区造成不可估量的损失。因此,为避免安全隐患,国家对危化品仓储的五距(堆距、墙距、顶距、柱距和通道距)有着严格的规定。但目前,对危化品仓储安全状态的监管,研究多集中在对运输过程或箱体罐体自身安全参数上的监控,或是对风险及事故影响的辨识方法分析,缺乏对堆垛方式安全的自动化监控[1]。
要实现自动化监管危化品的堆垛距离是否符合要求,一种直观的方式是查看实时还原的堆垛3D场景,通过对危化品的堆垛货箱进行跟踪定位,用货物堆放位置的精确定位参数和货物尺寸数据实现仓储的堆垛三维重构,就可以对危化品贮存五距进行实时监控。由于堆垛间距会因为货物定位坐标变动而改变,当堆垛间距小于预设的阈值范围时,就可触发逾限报警。该方案能有效实时监测危化品的堆放方式,消除仓储堆放环节的安全隐患。因此,研究危化品堆垛货物的高精度定位技术,是通过三维重构方法自动化监控堆垛方式安全的前提。
我国《常用危险化学品贮存通则》对危险品贮存的五距给出了明确规定和数值,一般性地有:隔离贮存、隔开贮存或分离贮存的垛距为0.3~0.5 m,墙距宽度为0.3~0.5 m;更具体地以危险品三硝基苯甲醚为例,堆码苫垫要求:货垛下垫高15~30 cm,宜堆小垛,垛高不超过2 m,垛距80~90 cm,墙距、柱距30~50 cm。为能有效监测堆垛间的安全距离,定位系统需要达到分米级,甚至厘米级的精度才能保证距离报警的准确性。在目前的室内定位技术中,超宽带(ultra wide band,UWB)定位技术定位精度能达到15~30 cm,与Wifi、zigbee、RFID、红外线等载波技术的定位精度相比是最高的[2]。UWB无线通信是一种不用载波[3-4],而采用时间间隔极短(小于1 ns)的脉冲进行通信的方式,与普通二进制移相键控(binary phase shift keying,BPSK)信号波形相比,这种通信方式占用带宽极宽,频谱功率密度极小,因此具有精度高、穿透能力强、抗多径抗干扰能力强及成本低等优势[5-8],较适合用于危化品仓储堆垛定位。
但研究发现,超宽带定位系统在遮挡物较多的非视距室内环境中,特别是环境中存在金属、液体等对高频信号衰减影响很大的物体时,性能出现明显恶化[9]。在针对危化品模拟仓库环境中的UWB定位性能实验中发现,出现的具体影响包括:定位坐标小幅度抖动、节点短暂消失甚至大幅跳变、定位坐标严重偏离真实坐标等现象[10],可见UWB定位在危化品仓储环境中的稳定性和精度仍有待提高。
通过对超宽带技术定位精度的误差来源分析,结合危化品仓储环境特点,提出了一种基于UWB的四参考点矢量补偿定位方法。经实验表明,该方法定位可靠,可有效改善危化品仓储堆垛的UWB定位性能,为实现危化品堆垛的五距自动化监控打下良好基础。
1 基于UWB的堆垛五距监测方案
1.1 基于UWB的堆垛定位实验平台
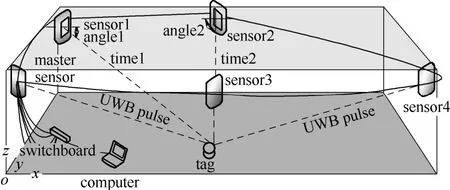
图1 UWB系统定位原理图Fig.1 UWB positioning principle of Ubisense7000
为分析研究UWB定位系统在危化品仓储环境中的定位性能,本文依托英国Ubisense7000系统提供的标签(tag)和传感器(Ubisense sensor),搭建了模拟危化品仓储堆垛安全实验平台。Ubisense定位系统由3个部分构成:电池供电的UWB标签、位置固定的定位传感器和信息综合软件平台[11]。如图1所示,在一个定位单元中,Ubisense系统工作时,标签发射极短的UWB脉冲信号,被传感器接收,传感器通过信号到达的时间差(time difference of arrival,TDOA)和信号到达的角度(angle of arrival,AOA)算法经软件平台计算出标签的精确位置[12]。标签位置能被任意两个信息计算出来,比如TDOA和一个AOA,或者两个AOA,因此,标签最少只需两个传感器便可进行定位,实际应用中,更多的传感器能保证定位精度的可靠性与有效性。同时,Ubisense系统支持双向的标准射频通信,可灵活设置标签数据更新率,传感器网络上报的位置数据经处理后,可通过基于.NET的API与上层软件进行交互。将UWB标签一对一地附着在危化品堆垛货物上,就能实现对每一个货位的定位和跟踪。将定位信息与货物本身尺寸信息综合,就可实时还原仓库堆垛位置及间距,进而判断危化品仓储的五距是否符合要求。
1.2 影响UWB定位性能的因素分析
在危化品仓储环境中,许多因素会影响超宽带定位系统精度,因此为了提高定位系统的精度和稳定性,必须要引入错误及干扰的根源,再寻找合适的算法来改善定位性能。由于本文实验平台采用的Ubisense7000系统通过TDOA/TOA(time of arrival,TOA)技术进行联合定位,因此下面主要分析基于时间和角度定位相关的误差因素[13-15]。
多径传播是引起各种信号测量值出现误差的主要原因之一。尤其是基于到达角度的定位中,在室内复杂信道环境下,障碍物的散射引起的多径效应严重影响精确角度估计[16]。即使在传感器和标签之间存在视距(LOS)传播,多径效应也会引起时间测量误差[17]。就TOA/TDOA估计而言,由于多径的存在,使用多径分量中最早分量DP(direct path)的TOA进行测距误差是最小的,所以测距精度取决于DP检测精度。目前已有许多种抑制多径的方法,比如在研究较充分的TOA估计算法中,基于能量检测的TOA非相干估计可依据能量采样峭度和最大最小能量比对DP块检测门限进行动态优化,提高DP检测成功率[18-19],但受采样频率限制,定位精度不理想;基于匹配滤波的相干TOA估计算法,采用较高的采样速率,能够最大程度挖掘UWB的精确测距能力:比如在视距(LOS)环境中,MUSIC[20]、PM[21]等算法具有很高精度,但在信噪比较低或者多径效应严重的NLOS(not line of sight)环境中,上述算法在实现峰值搜索方面依然十分困难,且算法复杂度很高;文献[22-24]提出了基于传播算子算法的TOA和DOA联合估计,一定程度上提高了高信噪比环境下的TOA定位精度,但需要较高的采样率导致算法可行性较差。总之,DP的检测精度和算法复杂度之间的矛盾难以实现妥善调和。
影响TOA/AOA估计定位精度的另一个主要因素是信号非视距传播(NLOS)。当传播信道中无直射路径时,只有信号的反射和衍射成分能够到达接收端,此时DP到达时间不能代表TOA的真实值,信号到达角度也不能代表AOA的真实值,存在非视距误差。在没有任何非视距误差信息的条件下,正确估计信号源位置是不可能的。目前消除非视距传播引起的TOA误差通常有以下几种方法:一种是通过TOA测量值的标准差对LOS/NLOS传播环境进行判断,NLOS传播的测距标准差比LOS传播高得多,利用测距误差统计的先验信息就可以将一段时间内的NLOS测量值调节到接近LOS的测量值;另一种方法是降低非线性最小二乘算法中NLOS测量值的权重,这种方法也需首先判断哪些基站得到的是NLOS测量值[25]。事实上,从概率的角度讲,无论采用的算法多么精准,都无法完美解决某一时刻信道陷入深衰落的问题。
2 基于UWB四参考点矢量补偿定位方法
2.1 方法提出
由UWB的定位原理可知,定位结果的计算由信号传输的直达路径和到达角度决定,在仓库足够大的情况下,仓储地面上一小片区域内的不同点的直射路径差和到达角度差别不大,因此该区域内监测点的定位结果误差应该有相同或相似的规律。该点的定位精度误差和以其为圆心的某圆上的所有监测点的误差方向和大小应存在类似分布。将该小圆化简为4个点构成的四边形,那么,四边形的4个顶点处的误差矢量和可以近似反映位于该区域内的监控点的误差矢量。选择将仓库区域网格化划分,在每个网格顶点设置参考点,即形成本文提出的四参考点矢量补偿的定位方法。
本方法首先需要建立参考系,对仓库中需监控区域进行二维方形网格划分,每个网格的四顶点设为4个参考点,获得并比较参考点处UWB标签的测量坐标和实际坐标,得到误差矢量,作为校正待测点的参考矢量;将危化品仓储中堆垛货物与标签绑定,寻找标签所处网格,用该网格的四参考点矢量补偿方法对标签的测量坐标值进行校正,将校正后坐标作为堆垛的最终定位位置。具体步骤如下:
(1)建立参考系。在UWB定位系统的覆盖范围里,首先对需要监控的平面区域划分方形网格,设网格顶点为参考点并标记其测量坐标和实际坐标的误差。在不同的仓储环境中,由于信道环境不同,UWB定位系统的定位精度有所不同,所以考虑网格大小的划分时,要具体情况具体分析:网格边长不宜过大,否则网格四顶点处的误差不能代表网格内的监测点的误差规律;间距也不宜过小,否则会导致监测点所处网格的误判。划分网格大小的基本原则为:仓储环境中UWB的定位精度越高,则网格越密越小;精度越低,网格相应变大,要依据具体仓储环境的定位精度有所调整。
(2)对待测点进行测量校正。进行堆垛定位时,将UWB定位标签绑定在堆垛货物上,不同货物的标签记为Pn,n =1,2,3,…,通过UWB定位系统得到Pn的测量坐标值PMn,再根据PMn的值判断Pn所处的参考系网格,如网格Gr;
校正方法:每个网格Gr的4个顶点都是参考点,假设其误差矢量为A1、A2、A3、A4,则用4个参考点的误差矢量和反向补偿待测点,补偿后的坐标为′′记为PMn,PMn为校正后的坐标。本方法能有效减少UWB在危化品仓储环境中的误差。
2.2 方法实现
为验证该定位补偿技术的有效性,在Ubisense7000系统搭建的危化品仓储实验平台上进行实验。首先,设定危化品仓储中的参考点。经测试,该仓储环境的最好定位精度在0.15 m以内,最大定位误差在0.4 m左右,因此将UWB信号覆盖的仓储空间按地面划分为0.3 m×0.3 m的正方形网格,通过激光测距仪依次测出各个参考点的实际坐标,记录。
本例中,对被监控区域,得到各测量点的UWB测量数据,根据测量结果判断其所处的网格及参考点。为方便误差矢量数据的显示,不失一般性,本例圈出了3个小区域的参考点和测量点分布图,将这3个小区域从左向右分别编号为G1、G2、G3。每个小区域内含4个测试点,其测试结果分别落在G1、G2、G3的4个小网格中。
通过UWB定位设备得到G1、G2、G3区域各个参考点处的测量坐标,建立实际坐标指向测量坐标的矢量,如图2所示。
根据3个区域的参考点测量结果显示,每个网格4个顶点处的误差矢量都不相同,将每个网格的4个参考点的矢量相加后平均,得到误差矢量和Am。而该4点组成的网格内的任意测量点的误差,可由Am近似替代。
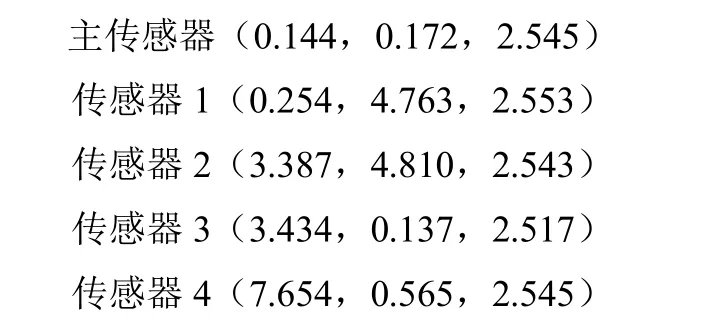
以G1区域中左上角4个参考点组成的小网格为例,其各个参考点的坐标见表1。

各个参考点的实际坐标记为RRm,各个参考点的测量坐标值记为RMm,计算误差矢量

表1 G1区域某网格参考点坐标Table 1 Coordinates of reference point in region G1

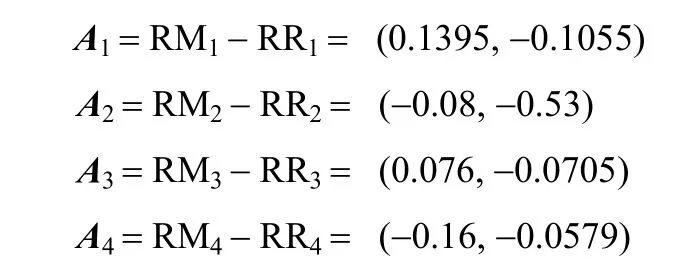
其中误差矢量计算方法为

以G1区域中左上方4个参考点组成的小网格为例,计算小网格4个参考点的误差矢量和

得到该网格内测试点的计算坐标为
(1.019, 1.391)+ (0.006, 0.191)= (1.025, 1.582)
2.3 方法精度分析
为验证四参考点矢量校正方法是否有效,计算各测试点校正前后到实际值的坐标距离,测量点的实际坐标为(1.052,1.682),因此有

式中,PM′为对待测点测量坐标校正后的坐标值;PM为测量点测量坐标校正前的坐标值;PR为测量点的实际坐标值。
可见该网格内,校正后的定位坐标与校正前的定位坐标相比,距实际值的距离更近,证明了四参考点矢量校正方法有效。采用此方法计算其他测试点的校正后坐标,结果如图3所示。
由图中可见,采用四参考点矢量校正方法校正后,各个测试点的定位精度均有所提升,精度提升比例根据参考点处的误差矢量值不同而有所不同,为方便对比,依然将G1、G2、G3区域圈出。具体数据见表2。表2列举了监控区域内所有网格待测点处的校正坐标,测量坐标、校正坐标和精度对比数据。
由表2可知,所有可测量点的校正后坐标与真实值平均距离D2为0.204 m,校正前坐标与真实值的距离D1为0.112 m,可以得出结论,待监测区域内所有可测量点在进行四参考点矢量补偿技术计算后,精度均有所提升,平均提高程度为0.092 m。验证了四参考点矢量补偿技术方法在危化品仓储领域有效。

表2 各测量点校正前后精度对比Table 2 Comparison of tested points before and after correction
3 结 论
自动化监控危化品仓储货物堆垛的五距,需要研究危化品仓储环境下的高精度定位技术。UWB窄脉冲由于具有极高的带宽,有很强的时间分辨力,因此具有极好的精确测距能力。本文分析了危化品仓储环境中影响UWB定位精度的主要因素,提出一种基于UWB四参考点矢量补偿的危化品仓储堆垛货物定位技术。经实验表明,各个测试点的定位精度均有所提升,精度提升比例根据参考点处的误差矢量值不同而有所不同,该方法能有效改善危化品仓储堆垛货物的定位精度,适合用于危化品仓储堆垛的五距(堆距、墙距、顶距、柱距和通道距)监控。尚未发现国内有类似地提高UWB定位精度的研究方案,下一步工作将对此校正方法做进一步改进,以期获得更好的定位效果。
References
[1] 柴保身. 我国危险品仓储业发展现状与展望 [J]. 物流工程与管理, 2009, 12 (31): 19-23.
CHAI B S. The developing situation and outlook of storage industry of dangerous chemicals in our country [J]. Logistics Engineering and Management, 2009, 12 (31): 19-23.
[2] 张宴龙. 室内定位关键技术研究 [D]. 合肥: 中国科学技术大学, 2014. ZHANG Y L. Research on the key techniques of indoor localization [D]. Hefei: University of Science and Technology of China, 2014.
[3] WIN M Z, SCHOTZ R A. Ultra-wide bandwidth time-hopping spread-spectrum impulse radio for wireless multiple-access communications [J]. IEEE Trans Commun., 2000, 48: 679-691.
2.以学术英语为导向,提倡培养批判性思维能力的教学模式。高校在制定大学英语教学目标时,不能单纯地以学生记住的单词数量,掌握的语法准确程度和达到的阅读速度作为教学目标,应该鼓励学生在基于学术英语内容的教学过程中学会质疑,善于发现和提出问题,并对问题进行深入的思考和探索,从中获得具有逻辑性且合理的解决方案。在教学中,学生的英语学习不再是被动地灌输和单纯依靠书本知识,而是通过发现、批判、研究、反思和评论等过程来掌握不同角度的知识获取途径。教师可以督促学生处理要求理由充分的判断或评价的任务,帮助他们提高处理任务所需的语言技能,营造一种珍视批判性思维的环境,激励学生从事批判性讨论。
[4] 范平志, 邓平, 刘林. 蜂窝网无线定位 [M]. 北京: 电子工业出版社, 2002: 120-128.
FAN P Z, DENG P, LIU L. Cellular Network Wireless Location [M]. Beijing: Electronic Industry Press, 2002: 120-128.
[5] WIN M Z, SCHOLTZ R A. Characterization of ultra-wide band width wireless indoor channels: a communications theoretic view [J]. IEEE Journal on Selected Areas in Communications, 2002, 20 (9): 1613-1627.
[6] CHOI J D, SCHOLTZ R A. Performance of ultra-wideband communications with suboptimal receivers in multi-path channel [J]. IEEE Journal on Selected Areas in Communications, 2002, 20 (9): 1754-1766.
[7] WIN M Z, SCHOLTZ R A, BARNES M A. Ultra-wide band width signal propagation for indoor wireless communications [C]// Proceedings of ICC97- International Conference on Communications. Montreal: IEEE, 1997: 56-60.
[8] ROSS G F. Transmission and reception system for generation and receiving base-band duration pulse signals without distortion for short base-band pulse communication system: US3728632 [P]. 1973-04-23.
[9] LEE J Y, YOO S. Large error performance of UWB ranging in multipath and multiuser environments [J]. IEEE Transactions on Microwave Theory and Techniques, 2006, 54 (4): 1887-1895.
[10] 戴波, 吕昕. 基于改进的UWB危化品堆垛仓储定位技术的研究[C]//第25届中国过程控制会议论文集, 2014. DAI B, LÜ X. Research on improved UWB-based location
technology applied on hazardous chemicals five-distances stacking storage [C]//The 25th Chinese Control Conference Proceedings, 2014.
[11] MARIA D B, GUERINO G. Understanding Ultra Wide Band Radio Fundamentals [M]. Upper Saddle River: Prentice Hall, 2006: 273-310.
[12] LEE J Y, SCHOLTZ R A. Ranging in a dense multipath environment using an UWB radio link [J]. IEEE Journal on Selected Areas in Communications, 2002, 20 (9): 1677-1683.
[13] VENKATESH S, BUELLLER R M. NLOS mitigation using linear programming in ultra-wide and location-aware networks [J]. IEEE Transactions on Vehicular Technology, 2007, 56 (5): 3182-3198.
[14] MIAO H L, YU K, JUNTTI M J. Positioning for NLOS propagation: algorithm deviations and Cramer-Rao bounds [J]. IEEE Transactions on Vehicular Technology, 2007, 56 (5): 2568-2580.
[15] WEI S K, ZIMMERMANN R, WANG H. Non-line-of-sight localization in multipath environments [J]. IEEE Transactions on Mobile Computing, 2008, 7 (5): 647-660.
[16] 刘秩成. 超宽带无线定位算法性能分析 [D]. 南京: 南京邮电大学, 2013.
LIU Z C. Performance analysis on UWB wireless positioning algorithm [D]. Nanjing: Nanjing University of Posts, 2013.
[17] 贺鹏飞. 超宽带无线通信关键技术研究 [D]. 北京: 北京邮电大学, 2007.
HE P F. Working out the key technologies of ultra-wideband wireless communications [D]. Beijing: Beijing University of Posts and Telecommunications, 2007.
[18] GUVENC I, SAHINOGLU Z. Threshold selection for UWB TOA estimation based on kurtosis analysis [J]. IEEE Communications Letters, 2005, 9 (12): 1025-1027.
[19] WU S H, ZHANG Q Y, ZHANG N T. Novel threshold-based TOA estimation algorithm for IR-UWB systems [J]. Journal on Communications, 2008, 29 (7):7-13.
[20] WANG Y Y, CHEN J T, FANG W H. TST-MUSIC for joint DOA-delay estimation [J]. Signal Processing, 2001, 49 (4): 721-729.
[21] DING R, QIAN Z H, WANG X. Joint TOA and DOA estimation of IR-UWB system based on matrix pencil [C]//International Forum on Information Technology and Applications. Chengdu, 2009: 544-547.
[22] 丁锐, 钱志鸿, 王雪. 基于TOA和DOA联合估计的UWB定位方法 [J]. 电子与信息学报, 2010, 32 (2): 313-317.
DING R, QIAN Z H, WANG X. UWB positioning system based on joint TOA and DOA estimation [J]. Journal of Electronics and Information Technology, 2010, 32 (2): 313-317.
[23] MATCOS S, MARSAL A, BENIDIR M. The propagator method for source bearing estimation [J]. Signal Processing, 1995, 42 (2): 121-138.
[24] 王方秋,张小飞. 脉冲超宽带系统中基于改进传播算子算法的TOA和DOA联合估计 [J]. 电子与信息学报, 2013, 35 (12): 2954-2959.
WANG F Q, ZHANG X F. Improved propagator method-based joint TOA and DOA estimation in impulse radio ultra wide band [J]. Electronics and Information Technology, 2013, 35 (12): 2954-2959.
[25] 丁锐. 基于UWB信号时延估计的无线定位技术研究 [D]. 长春:吉林大学, 2009.
DING R. Study on wireless localization technology based on UWB signal time delay estimation [D]. Changchun: Jilin University, 2009.
研究论文
Received date: 2015-12-28.
Foundation item: supported by the Beijing Administration of Work Safety.
A UWB-based four reference vectors compensation method applied on hazardous chemicals warehouse stacking positioning
DAI Bo1, LÜ Xin1,2, LIU Xuejun1, LI Zhichao1,2
(1College of Information Engineering, Beijing Institute of Petrochemical Technology, Beijing 102617, China;2College of Information Science & Technology, Beijing University of Chemical Technology, Beijing 100029, China)
Abstract:Monitoring of five distance of hazardous chemicals storage warehouse stacking (distance, pile wall distance, zenith distance, spacing and channel spacing) is an important topic in dangerous goods warehouse safety supervision. Studying high precision positioning technology of dangerous goods stacking, is the premise of automately monitoring stacking safety. In this study, the main factors affecting the accuracy of UWB positioning of dangerous chemicals storage are analyzed, and an UWB four reference vectors compensation method applied on dangerous chemicals warehouse stacking positioning is proposed. Firstly, a reference system is established, and the monitoring area is divided into rectangular grids, each vertex of grids is named as a reference point, then the error vectors UWB positioning values at the reference points are obtained, and are took as the reference vector to calibrate the target points; Secondly, UWB tags are attached to dangerous chemical goods stacking, searching the grids around the tags, and calibrating the position value of the tags by the UWB four reference vectors compensation method. Finally, the corrected coordinates are considered as the final position of stacking. The experiment showed that this method can effectively improve the positioning precision of the dangerous chemicals warehouse stacking, it is suitable for monitoring the five distance of hazardous chemicals warehouse stacking.
DOI:10.11949/j.issn.0438-1157.20151975
中图分类号:TN 98
文献标志码:A
文章编号:0438—1157(2016)03—0871—07
基金项目:北京市安全生产监督管理局项目。
Corresponding author:Prof. DAI Bo, daibo@bipt.edu.cn
