基于LPC2132的蛇形机器人前端执行机构及控制系统设计*
2016-05-11李红岩侯媛彬西安科技大学电气与控制工程学院陕西西安710054
李红岩,侯媛彬(西安科技大学电气与控制工程学院,陕西西安710054)
基于LPC2132的蛇形机器人前端执行机构及控制系统设计*
李红岩,侯媛彬
(西安科技大学电气与控制工程学院,陕西西安710054)
摘要:为了使蛇形机器人在不同地形环境下能更好地完成搜救任务,文中根据蛇形机器人的特点,从总体上设计了一种新型的前端执行机构。针对传统的蛇形机器人头部只有搜寻传感器无执行器的缺点,提出采用4自由度的正交机械臂作为前端执行器的方法,并以ARM7-LPC2132为控制器、L298N为电机驱动模块、液晶屏12864为人机交互界面搭建了系统的硬件平台。通过无线路由器WR703n可将天敏S608摄像头数据传至上位机进行视频监控、上位机可通过NRF24L01无线数传模块对下位机进行实时控制、温度测量、烟雾报警、机械臂除障等功能,从而可以进行复杂地形及位置领域的探测。系统程序软件采用C语言及C#编写。系统经过调试,可以实现对障碍物的夹取和搬运等预定功能。无线遥控距离可以达到100 m,而且通信效果稳定可靠。
关键词:蛇形机器人;执行机构; LPC2132;舵机; RF
0 引言
近年来,世界各地地震灾害频发,它常常伴随着地面的剧烈振动及地面裂缝。使得各类建筑物倒塌和损害,使得通信系统中断。有毒有害气体的泄漏,火灾的发生,瘟疫的发生,放射性物质的泄漏等等诸多二次灾害造成了灾害现场各种的复杂地形。在人类历史上,每次灾害都给带来了巨大的损失,所以灾后的救援工作就显得尤为重要,在位置狭小且二次灾害多发的搜救地点,就需要一个灵活的搜救设备,去采集现场的数据,使知道现场的情况。蛇形机器人是近年来兴起的仿生机器人分支之一。与传统利用轮、腿或履带移动的机器人不同,蛇形机器人可以模仿蛇的动作,通过身体的扭动和伸缩实现无肢运动,该运动方式具有稳定性好、横截面积小、柔性高等特点[1-2]。蛇形机器人在许多领域具有广泛的应用前景:如在有辐射、有粉尘、有毒等战场环境下,执行侦察任务;在地震、塌方及火灾后的废墟中找寻伤员;在空间狭小和环境危险条件下探测和疏通管道等[3]。随着科学技术的日新月异,科技的飞跃带动了智能化的发展,蛇形机器人技术己经受到越来越多的关注,蛇形机器人系统的研究己成为科学领域一个充满活力、具有挑战性的前沿发展方向。
蛇的爬行大致可分为4种方式[3-5]
1)蜿蜒运动。蛇体摆动近似于正弦波的规律,借助蛇的肌体接触凸凹不平的地面所产生的反作用力前进;
2)伸缩运动。身体先收缩成树立的S形,然后后部贴紧地面,前部向前伸出,接着前部再贴紧地面,后部收缩向前,如此循环完成向前移动;
3)侧向运动。借助腹部和地面的摩擦力移动,蛇体从头部开始,身体部分顺次接地、抬起,借助腹部与地面之间的摩擦力完成侧向运动;
4)直线运动。蛇体靠腹部和地面的摩擦力移动,当腹部与地面固定时提供牵引力,连接肋骨和弹性皮肤的肌肉提供推动力,皮肤相对骨骼移动,反复实现运动。
蛇形搜救机器人正是利用了蛇的运动特点,可以适应各种复杂的地形,尤其是地震、矿井的灾害后的环境,它们具有障碍物多、地形狭窄、空间环境危险、容易产生易燃气体等危险因素,蛇形机器人可以灵活的应对这些环境,完成搜救任务,为搜救工作节约了宝贵的时间[6]。
1 蛇形机器人前端执行机构系统的总体设计
蛇形机器人前端执行机构是以WR703n和LPC2132为核心。硬件电路由电源模块、无线路由模块、摄像头模块、机械臂模块、烟雾报警模块、液晶显示模块和上位机模块组成。该系统的结构框图如图1所示。
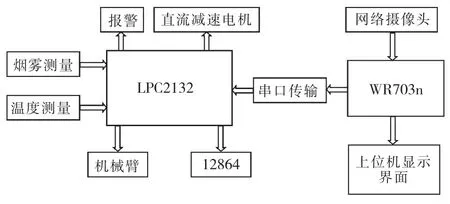
图1 蛇形机器人前端执行机构系统框图Fig.1 Snake robot actuator front-end system diagram
电源模块采用了ACE聚合物锂电池组。它的额定输出电压为11. 1 V,额定容量为2 200 mA时,30C持续放电,采用平衡充电方式,充电电流为0. 5到1 A.经过LM7805稳压芯片输出5 V电压,可以实现LPC2132最小系统、L298N模块、MQ2烟雾传感器模块等外设的供电。对于机械臂上的4路舵机,由于其驱动电压需要达到7. 4 V,故采用LM7808稳压后进行供电。而对于无线路由模块WR703n来说,为了防止外设会对该模块的干扰,保障其工作的稳定性,采用独立的5 V电源对其供电,这样也可以保证整个系统的稳定运行。
控制部分是通过LPC2132和上位机来实现的,控制器通过对L298N模块的控制来实现电机的正反转,从而实现蛇形机器人的前进、后退、翻转等动作;使用DS18B20传感器来检测周围环境温度,使用MQ2传感器来检测机器人所处环境的烟雾浓度,传感器的数值在12864液晶屏上实时显示。LPC2132与路由器之间使用串行数据传输,将路由器与上位机使用wifi进行连接,可以实现上位机对下位机的控制。
无线路由模块主要作用是控制蛇形机器人执行机构的动作以及视频传输。本次设计使用的无线路由器型号为TL-WR703n,703n路由器有3种工作的模式,分别为AP(无线AP)模式、3G Router(3G路由)模式和Wireless Router(无线路由)模式,这里主要使用无线路由模式。通过刷固件的方法对无线路由器进行改造,引出RXD,TXD 和GND接到LPC2132控制器,通过无线网络连接电脑。天敏S608网络摄像头通过USB与无线路由器相连,所采集的视频数据经过无线路由器发送至上位机实现视频的实时监控功能[13]。
上位机模块是使用C#语言进行编写。上位机除了接收无线路由发回的视频信号外,还可以将控制信号经由无线路由器发至下位机来控制蛇形机器人的各种动作。
2 系统硬件电路设计
2. 1核心控制器与系统电源
控制器采用LPC2132开发板。LPC2132是基于一个支持实时仿真和嵌入式跟踪的32位ARM7TDMI-STM CPU的微控制器,并带有128kB的嵌入的高速Flash存储器。128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行。多个32位定时器、1个10位8路ADC,2个32位定时器/外部事件计数器、PWM通道和47个GPIO以及多达9个边沿或电平触发的外部中断使它们特别适用于工业控制和医疗系统.为了保证续航能力,系统供电部分采用锂聚合物航模电池,使用稳压模块LM7805和AS1117分别给无线路由和主控芯片进行供电[7-9]。
2. 2执行机构设计及控制方法
这里设计的机械臂4自由度的,机械臂模块主要有舵机及控制板组成,搭配一对NRF204L01无线发射和接收模块,可以实现舵机的远程控制。由于无线模块的控制距离最高可达100 m,可以不用靠近机器人就能实现机械臂的控制操作。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。舵机的控制一般需要一个20 ms左右的时基脉冲,该脉冲的高电平部分一般为0. 5~2. 5 ms范围内的角度控制脉冲部分。
本次设计中使用的舵机为辉盛SG90舵机,此舵机的特点为体积小,质量仅为9 g,扭矩大。其主要参数如下
1)工作扭矩: 1. 6 kg/cm;
2)反应转速: 0. 12到0. 13 s/60°;
3)使用温度:-30℃到60℃;
4)死区设定: 5 ms;
5)转动角度:最大180°;
6)工作电压: 3. 5到6 V.
辉盛SG90舵机信号控制图如图2所示。4自由度机械臂模块实物图如图3所示。
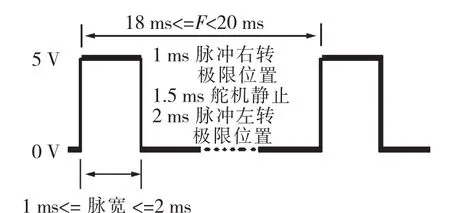
图2 SG90舵机信号控制图Fig.2 SG90 servo control chart
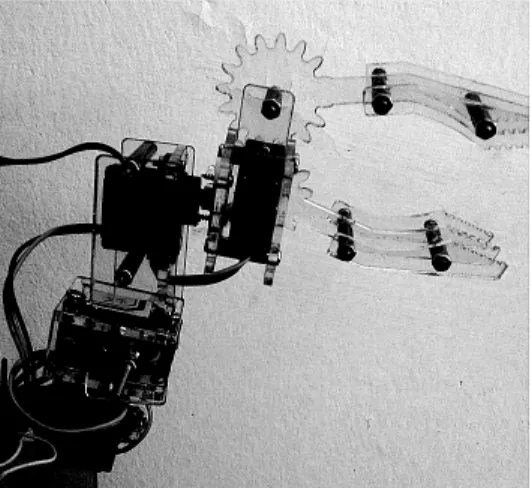
图3 4自由度机械臂模块实物图Fig.3 4 degree of freedom mechanical arm
通过舵机控制板来对机械臂模块的舵机进行控制,使用电位器以精确控制舵机角度,从而达到理想的使用效果。
2. 3直流电机驱动电路
给蛇形机器人前端提供动力的是直流减速电机,这里使用L298N对其进行驱动[10]。L298N芯片的驱动电压为5 V到35 V,逻辑工作电压直流5 V,逻辑工作电流为0到36 mA,驱动电流最大单桥为2 A,存储温度为-20℃到+ 135℃,最大功率为25 W.本设计驱动电路如图4所示,其中二极管为续流二极管,电容为滤波电容。当L298N使能端为低电平时,运转状态为停止。以下情况为当使能端为高电平时:输入端1为高电平,输入端2为低电平,电机运转状态正转;输入端1为低电平,输入端2为高电平,电机运转状态反转;输入端1为高电平,输入端2为高电平;电机运转状态刹停。输入端1为低电平,输入端2为低电平,电机运转状态停止。L298N驱动电路原理图如图4所示。

图4 L298N驱动电路原理图Fig.4 Schematic diagram of L298N driver circuit
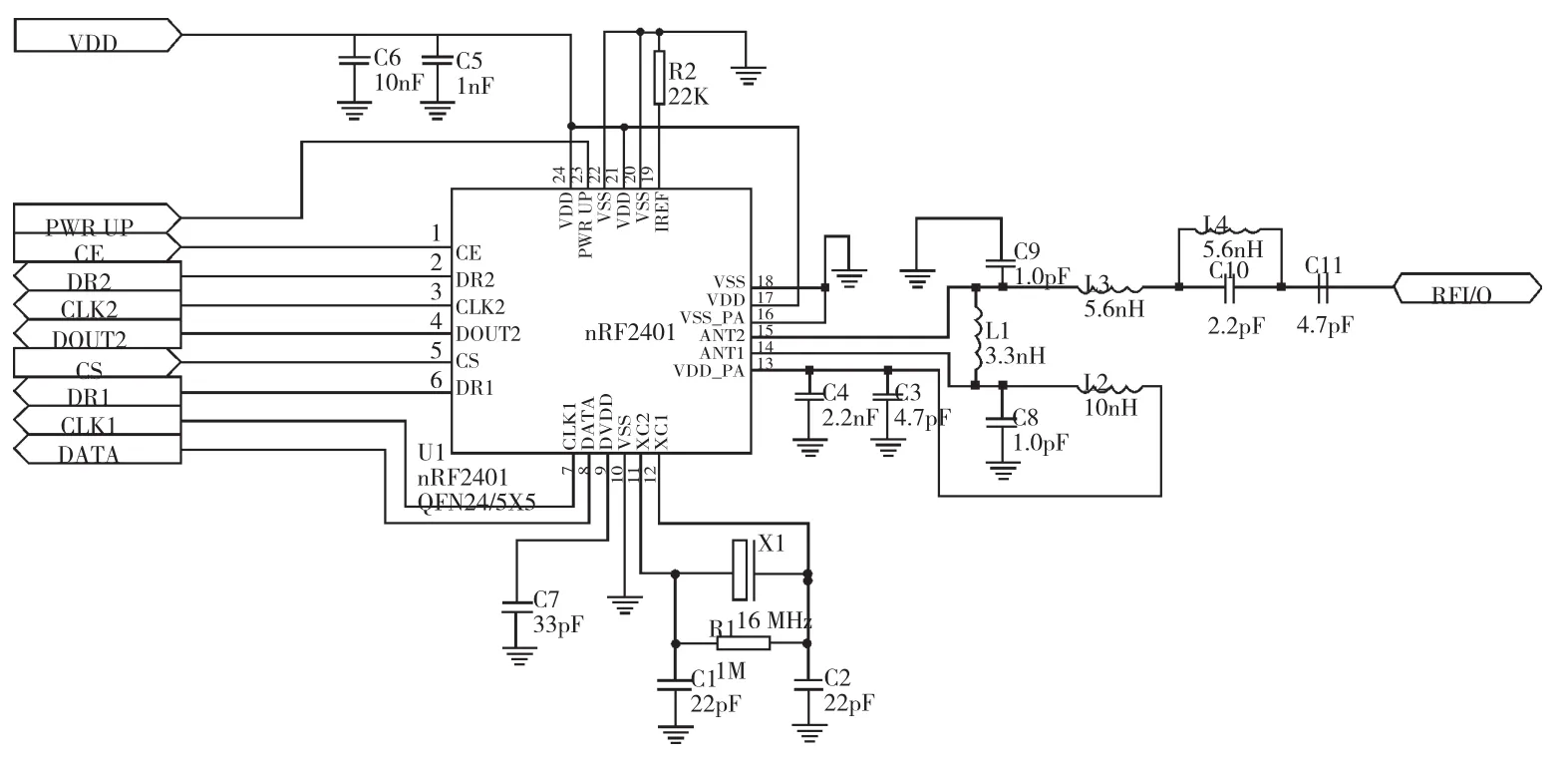
图5 NRF24L01无线模块原理图Fig.5 Schematic diagram of NRF24L01 wireless module
2. 4无线数传电路
舵机的控制使用了无线模块进行远程遥控,无线模块使用了NRF24L01无线模块一对,无线模块在空旷地带实测控制距离100 m.工作电压在1. 9 V到3. 6 V之间,传输速率为54 mbps,因为在空中传输的速率非常的短,所以有效的避免了无线传输中的碰撞现象,支持多频点工作,共含有125个频点,能够满足多点通信的需要和跳频通信的需要[11]。模块小巧内置2. 4 GHz天线。为了减小电流消耗,当工作在应答模式时,启动时间缩小,在空间快速传播,这样就降低了电流的消耗。NRF24L01内部集成了所有与RF协议相关部分的高速信号处理部分。NRF24L01无线模块电路原理图如图5所示。
除此之外,还设计了可以检测可燃气体和烟雾的MQ2传感器模块电路,以及可以检测温度的ds18b20数字温度传感器电路[12-13]。
3 控制系统的软件设计
系统下位机程序主要使用C语言编写,在Keil uVision4开发环境下编译调试完成。
各个功能模块的程序由主程序和若干子程序组成,主程序包括GPIO口的定义初始化和显示器配置程序。系统程序主要由电机驱动子程序、按键扫描子程序、显示子程序等构成。主程序流程图如图6所示。
上位机部分采用C#语言进行编写[14-15],通过Visual Studio(以下简称VS)软件进行调试。上位机界面如图7所示。
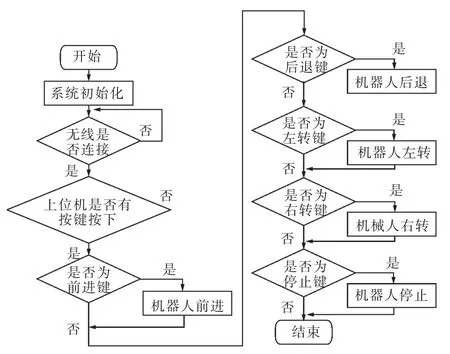
图6 系统的主程序流程图Fig.6 Main program flowchart of the system
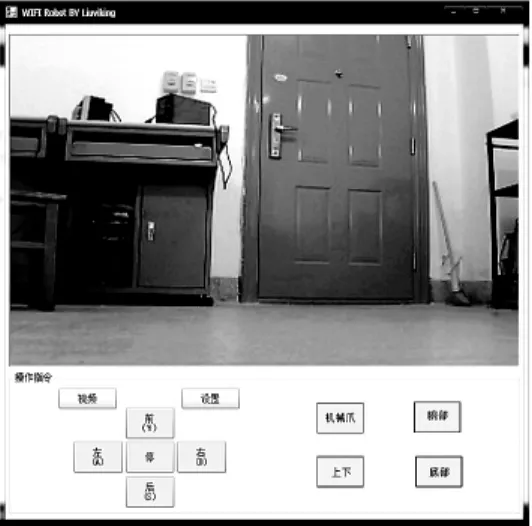
图7 上位机界面显示图Fig.7 Upper computer interface display
4 结论
文中主要完成了蛇形机器人前端执行机构的设计与制作。系统硬件部分主要完成了机械臂设计、电源模块、直流电机驱动模块、舵机驱动模块、传感器模块、无线传输模块及显示模块的设计制作。系统软件部分以实现系统功能为目的,采用模块化结构设计。本系统实现了预期计划的功能,能够良好地实现周边环境的监测,对障碍物的抓取及清理,无线控制距离能够达到100 m,而且稳定可靠。该执行机构的控制算法简单,成本较低,速度调节简单方便,舵机电机运行稳定,追随性能好,程序具有一定的通用性。
参考文献References
[1]李斌.蛇形机器人的研究及在灾难救援中的应用[J].机器人技术与应用,2003(3) : 22-26. LI Bin.Research and application of snake like robot in disaster rescue[J].Robot Technique and Application,2003(3) : 22-26.
[2]Dowwling K.Limbless locomotion: learning to crawlwith a snake robot[D].Robotics Institute: CarnegieMellon University,1997.
[3]陈丽,王越超,李斌.蛇形机器人研究现况与进展[J].机器人,2002(6) : 559-563. CHEN Li,WANG Yue-chao,LI Bin.A study on the current situation and progress of snake robot[J].Robot,2002(6) : 559-563.
[4]李红岩,高阳东.基于LPC2131的RF遥控智能小车的设计[J].自动化与仪表,2012(12) : 10-13. LI Hong-yan,GAO Yang-dong.Design of remote intelligent vehicle RF based on LPC2131[J].Automation and Instrumentation,2012(12) : 10-13.
[5]李红岩,高阳东.基于LPC2131的RF遥控多关节蛇形机器人[J].自动化与仪表,2014(6) : 1-4. LI Hong-yan,GAO Yang-dong.RF remote control multi joint snake robot based on LPC2131[J].Automation and Instrumentation,2014(6) : 1-4.
[6]白云.煤矿救援蛇形机器人环境建模方法研究[J].西安科技大学学报,2014,34(4) : 485-489. BAI Yun.Study on coal mine rescue robot environment modeling method[J].Journal of Xi’an University of Science and Technology,2014,34(4) : 485-489.
[7]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2005. ZHOU Li-gong.ARM based embedded system tutorial [M].Beijing: Beihang University Press,2005.
[8]朱圣领.一种新型蛇形机器人的运动规划研究[J].机械设计与研究,2004,20(5) : 23-25. ZHU Sheng-ling.Study on motion planning of a new kind of snake robot[J].Machine Design and Research,2004,20(5) : 23-25.
[9]温乃宁,龚尚福.基于ARM的矿用温湿度监测系统研究[J].西安科技大学学报,2013,33(4) : 455-459. WEN Nai-ning,GONG Shang-fu.Research on temperature and humidity monitoring system of mine based on ARM[J].Journal of Xi’an University of Science andTechnology,2013,33(4) : 455-459.
[10]樊荣,侯媛彬,张轶斌,等.基于专家系统随机逼近的激光传感器的温度补偿研究[J].西安科技大学学报,2015,35(4) : 492-497. FAN Rong,HOU Yuan-bin,ZHANG Yi-bin,et al.Temperature compensation of laser sensor based on stochastic approximation of expert system[J].Journal of Xi’an University of Science and Technology,2015,35(4) : 492 -497.
[11]冯育长,雷思孝,马金强.单片机系统设计与实例分析[M].西安:西安电子科技大学出版社,2007.FENG Yu-chang,LEI Si-xiao,MA Jin-qiang.Design and analysis of single chip microcomputer system.[M].Xi’an: Xi’an Electronic and Science University Press,2007.
[12]姜杰.煤矿机器设备的可靠性研究[J].西安科技大学学报,2014,34(1) : 75-80. JIANG Jie.Reliability research of the coal mine machinery and equipment[J].Journal of Xi’an University of Science and Technology,2014,34(1) : 75-80.
[13]来望银.视频监控系统在火灾报警中的应用[J].西安科技大学学报,2013,33(4) : 400-403. LAI Wang-yin.Application of video surveillance system in fire alarm system[J].Journal of Xi’an University of Science and Technology,2013,33(4) : 400-403.
[14]汪洋,李斌,陈丽,等.蛇形机器人控制系统的设计与实现[J].机器人,2003(6) : 491-494,500. WANG Yang,LI Bin,CHEN Li,et al.Design and implementation of robot control system[J].Robot,2003(6) : 491-494,500.
[15]Masashi S,Masakazu F,Tetsuya I.Serpentine locomotion with robotic snakes[J].IEEE Control Systems Magazine,2002,22(1) :64-81.
《西安科技大学学报》获“中国科技论文在线优秀期刊”一等奖
2015年底,教育部科技发展中心公布了“中国科技论文在线优秀期刊”暨“中国科技论文在线科技期刊优秀组织单位”评选结果。评选出“中国科技论文在线优秀期刊”一等奖111项,二等奖183项;评选出“中国科技论文在线科技期刊优秀组织单位”64个。其中,《西安科技大学学报》获“中国科技论文在线优秀期刊”一等奖,同时,西安科技大学获“中国科技论文在线科技期刊优秀组织单位”殊荣。
Design of snake-like robot front end actuator and control system based on LPC2132
LI Hong-yan,HOU yuan-bin
(College of Electrical and Control Engineering,Xi’an University of Science and Technology,Xi’an 710054,China)
Abstract:In order to make the snake-like robot can better perform search and rescue missions in different terrain environment,according to the characteristics of the snake-like robot,a new front end actuator was designed.According to the faults of traditional snake-like robot head only has sensor without actuator,the method of 4 degree of freedom is proposed as the front end effector,the hardware platform is built with ARM7-LPC2132 as the controller,L298N as the motor driving module and LCD screen 12864 as the man-machine interface.Through a wireless router WR703n Mortimer S608 camera data can be transferred to the host machine.By the wireless data transmission module the host machine can real-time control the lower machine,temperature measurement,smoke alarm,mechanical arm in addition to the barrier,which can perform complex terrain and device field detection.The program is written by C and C# language.After debugging,the function of the clamping and handling of the obstacle etc.can be achieved.The wireless remote control distance can reach 100 meters,and the communication effect is stable and reliable.
Key words:snake robot; actuator; LPC2132; servo; RF
通讯作者:李红岩(1980-),男,山东东阿人,高级工程师,E-mail: lihongyan@ xust.edu.cn
基金项目:国家级大学生创新项目(201410704032)
*收稿日期:2015-09-18责任编辑:高佳
DOI:10.13800/j.cnki.xakjdxxb.2016.0218
文章编号:1672-9315(2016) 02-0265-06
中图分类号:TP 242
文献标识码:B
