温度控制继电反馈参数自整定技术研究
2016-05-11ResearchontheRelayFeedbackParameterSelftuningTechnologyforTemperatureControl
Research on the Relay Feedback Parameter Self-tuning Technology for Temperature Control
殷华文(南阳理工学院电子与电气工程学院,河南南阳 473004)
温度控制继电反馈参数自整定技术研究
作者殷华文(1967-),男,1989年毕业于沈阳工业学院计算机及应用专业,获学士学位,副教授;主要从事自动化方面的教学和科研工作。
0 引言
Asortm和Hagglund在1984年提出基于继电反馈控制的PID参数整定方法[1]。基于继电反馈的PID参数整定过程完全在闭环条件下完成,对扰动不灵敏。由于振荡幅度可控,继电反馈PID参数自整定广泛应用于大多数工业过程[2]。继电反馈PID参数自整定策略是在闭环控制方式下完成,通过继电参数的合理选择,整定过程被保持在设定点附近[3]。
温度对象是典型的过程对象,积分温度对象是非自衡对象,不可能产生振荡,所以本课题以惯性温度对象进行研究。温度对象具有大惯性、大滞后和非线性的特点,产生振荡比较困难。因此,如何在工作点附近产生稳定的振荡,如何提取振荡信息是值得研究的。本课题通过理论研究和软件仿真,并进行工程实验,努力找出一套具有工程实用价值的继电反馈振荡和参数自整定技术。
1 继电反馈的理论基础及参数整定思想
1.1标准继电反馈
基于继电反馈的参数整定控制框图如图1所示,控制系统有测试状态和控制状态两种状态。在测试状态下,利用继电控制的非线性特性使过程响应,通过极限环振荡来测试系统的振荡频率和幅值,进而获得系统的频域信息或近似的模型结构;然后由获得的系统信息根据选定的控制策略求得控制器参数;在控制状态下,采用求得的控制器参数来运行系统。
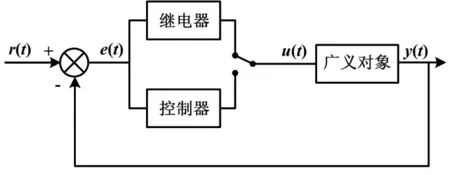
图1 基于继电反馈的参数整定控制框图Fig.1 Control block diagram of parameter tuning control based on relay feedback
在继电反馈控制下,被控对象只要具有至少-π的相位滞后就可产生临界振荡,这样就可获得临界信息,然后应用Ziegler-Nichols公式确定PID参数[2]。
1.2带滞环的继电反馈
为防止由于噪声产生的颤动,继电器应有滞环,同时反馈系统应使极限环振荡保持在规定的范围内。极限环法必须提供的唯一先验知识是继电器特性幅值d的初始值。继电器滞环的宽度h由测量噪声来确定[4]。
带有滞环的继电环节的描述函数如下所示[5]:

则其负倒描述函数如下所示:

由上式可见,当设定了继电幅值d和滞环宽度h之后,它的虚部是一个常数,所以它是一条平行于负实轴的实线。通过调整滞环宽度h,就可以使它与被控对象的奈氏曲线有不同的交点,这样就可得到复平面第三象限的所有频率点。带滞环的奈氏曲线如图2所示。图2中两条曲线相交于第三象限,负倒描述函数与对象的奈氏曲线相交后穿出的点就是临界振荡点,临界点位于第三象限[5]。
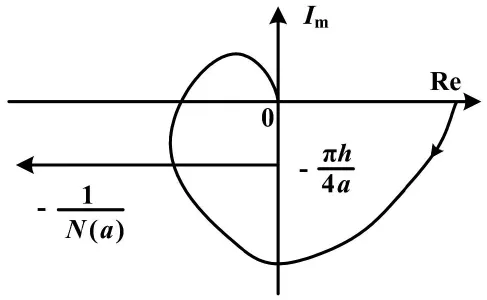
图2 带滞环的奈氏曲线Fig.2 Nyquist curves with hysteresis
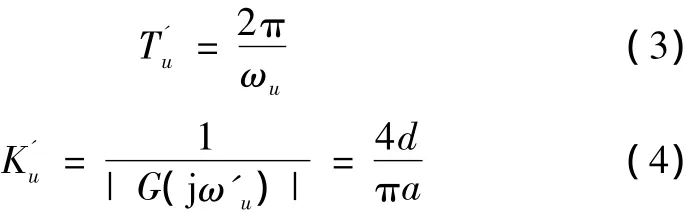
假定此时的临界增益为Ku,临界振荡周期为Tu,它们的计算如下[2]:
带滞环的继电反馈振荡曲线原理图如图3所示。
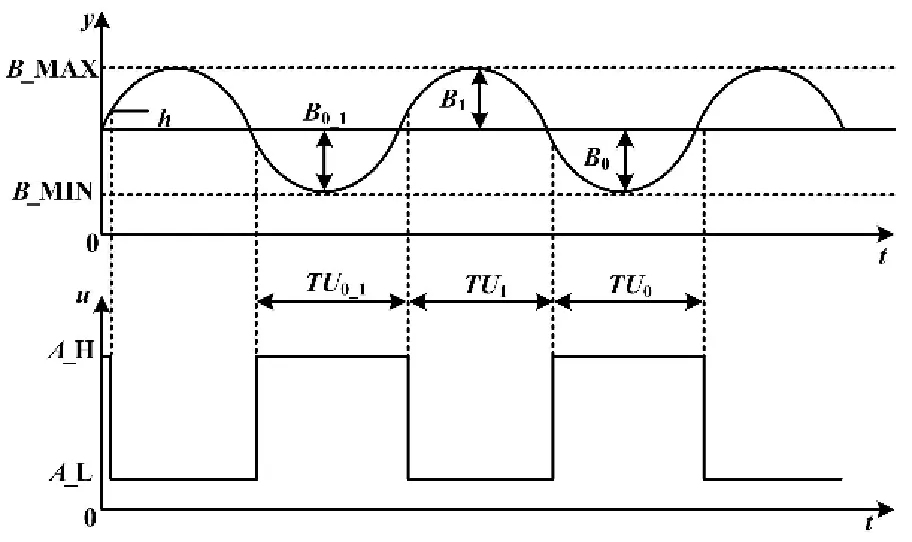
图3 带滞环的继电反馈振荡曲线原理图Fig.3 Schematic diagram of relay feedback oscillation with hysteresis
原始继电环节,当PV>SV时,继电环节的输出就会立刻翻转变化;而带有滞环的继电环节,因为存在滞环宽度h,所以当PV>SV且偏差绝对值大于h时,继电输出才会翻转变化,使得继电环节的切换要延迟一段时间,临界振荡周期也会多出一段时间,随之振荡曲线的振幅a也会增加,那么临界增益则会相应减小。
1.3继电反馈振荡的物理意义
继电输出矩形波脉冲按照傅里叶级数分解,将会有许多谐波分量,那么它的基波是什么呢?基波就是广义对象的固有频率波。继电输出脉冲的各个谐波分量经过广义对象后就像经过一个选频器一样,只有和广义对象固有频率相应的谐波分量得以通过,而其他的谐波分量都将被衰减,最后就只剩下基波信号在系统内流动。由于非线性环节无法用传递函数来准确表达,所以用它传递的基波分量的幅相频率特性来描述,这就是描述函数。广义对象既包括过程对象,也包括执行器和传感变送器,显然广义对象的惯性有大有小。小惯性对象由于时间常数小容易产生振荡,而温度这样的大惯性对象振荡起来将比较困难。同样的继电环节用在不同的广义对象,它的描述函数将是不一样的。
2 实验对象和控制回路设计
本课题以电加热锅炉为控制对象,锅炉容积约30 L,锅炉液位稳定在400 mm,电加热丝功率为4.5 kW。锅炉从上注入凉水,从下流出被加热的水,在出水管路上安装Pt100传感器检测水温。出水口温度为被控变量,由于锅炉水是动态的,所以它应是一阶惯性加滞后对象。测试对象数学模型,研究对象特点,再进行继电反馈振荡实验,整定出PID参数,实现温度PID控制。Pt100检测出的温度信号,经变送器后送入PLC控制器中进行PID + PWM运算,输出时间比例脉冲控制继电器、接触器的通断,控制加热丝的加热时间,实现加热控制,控制系统方框图如图4所示。
采用响应曲线法测试对象的数学模型,对象增益K =0.914~1.059,时间常数T =594~631.5 s,滞后时间=23~29.5 s。由此可见,对象具有非线性、时变性。取K、T的平均值来表达对象的数学模型,具体为式(5):

由式(5)可以看出,对象惯性大、滞后大。测试得到的数学模型中增益为无量纲的数值,在之后进行的继电反馈振荡实验中,继电输出A_H、A_L、设定值、振荡振幅a、临界增益Ku,这些变量均是归一化之后无量纲的数值。

图4 锅炉动态水温度控制系统框图Fig.4 Block diagram of dynamic boiler water temperature control system
3 带滞环继电反馈振荡技术和振荡曲线辨识
3.1对象起振
手动设置PID输出一个定值如50%,此即继电输出的中心点M。由于是惯性对象,最终温度会稳定下来。假如此时的温度值就是实际工业对象工艺要求的工作点,把此温度值作为自整定算法的设定值SV,并设定继电输出幅值d和滞环宽度h。由于过程对象的非线性,不同工作点处对象的数学模型是有差异的,所以在工作点附近进行振荡,采用提取出的对象信息计算控制参数就更有针对性。
在这里设置一个继电输出中心点是非常重要的。因为大部分PID调节都是单极性0~100%输出,所以继电反馈振荡中输出的极限环也必须是单极性的,即保证继电输出MV = M±d =0~100%。在继电中心点M =50%的情况下,继电幅值的极限值为±50%。由于温度为大惯性对象,继电幅值应设置较大,所以这里设置继电幅值d =±40%。在随后的实际对象振荡中继电幅值也应设置较大。
当PV>SV且偏差绝对值大于滞环宽度时,继电输出A_L = M-d;当PV<SV且偏差大于滞环宽度时,继电输出翻转跳变为A_H = M + d,从而实现了系统的振荡,温度曲线将在SV线上下翻转振荡。这个过程和在秋千两边有两个人一推一挽让秋千荡起来的道理很相似。和单摆一样,秋千的振荡周期和推挽的力量无关,而和摆线的长度有关。同样继电反馈振荡的周期和广义对象的惯性大小有关,小惯性环节的振荡周期比较短,而大惯性环节的振荡周期将会比较长。质量大的秋千需要较大的推挽力量才能荡起来,同样惯性大的对象需要较大的继电幅值去推动才能振荡。
3.2正弦振荡曲线的在线辨识

从振荡曲线中提取振荡幅值和振荡周期,根据Ziegler-Nichols公式在线计算出PID参数并赋给PID调节器,结束参数整定切换到PID调节,即实现了PID参数自整定。
3.3非对称正弦振荡曲线的处理
鉴于温度对象具有大惯性、大时滞、不容易振荡,且振荡曲线易偏移、不稳定等特点,要实现惯性温度对象的稳定振幅振荡,就必须考虑所有外在影响因素并将所有影响因素消除或降到最低。
振荡得到的正弦曲线在设定值上下幅值对称,是整个继电反馈振荡实验成败的关键,也是曲线在线辨识成败的关键。若振荡曲线上下不等幅,必然会引起振荡曲线的漂移,进而使获取的振荡周期时大时小,造成曲线辨识程序无法正常辨识振幅和周期,难以完成参数在线自整定。在此振荡过程中出现的振荡曲线不稳定、曲线幅值非对称等做如下处理。
(1)振荡曲线不稳定、振幅时大时小。由于锅炉温度和液位之间存在耦合,因此在对温度做振荡实验时,要保证锅炉液位的恒定。在此对液位采用PID控制,等到液位稳定之后再开始温度的继电反馈振荡,最大限度减小锅炉液位变化对振荡曲线的影响[6]。
(2)振荡曲线上有毛刺。振荡曲线上的毛刺会影响到继电输出A_H或A_L的切换,影响振荡幅值、周期的采集和辨识,因此对当前值做滑动平均滤波,使曲线变得平滑。
(3)振荡曲线稳定后非对称。继电反馈振荡是在手动输出等待对象稳定后设置继电参数,开始振荡和整定控制参数。手动输出应该使对象在工艺设定值附近稳定下来。当动态水温度没有最终稳定下来便开始振荡,那么振荡曲线会在设定值上下出现非对称振荡,即正弦曲线的正负半周振幅不相等。
对于振荡曲线的非对称,可以采用非对称继电输出来进行相互抵消,从而得到在设定值上下对称的振荡曲线。比如振荡曲线正半周振幅小而负半周振幅大,继电输出幅值设为40%,实际继电输出以50%为基础,正向继电输出50% + 40% = 90%,而反向继电输出50%-30% = 20%。这就像一个秋千来回行程的阻尼不一样,我们可以让两边的推挽力量不一样,从而保证让秋千形成等幅振荡;或者从设定值的选取考虑,再次寻找温度最终稳定值,作为温度设定值,重新进行继电反馈振荡。
4 带滞环继电反馈参数整定和温度PID控制
整定的初始条件:采用两个PID控制回路分别对锅炉液位和锅炉动态水温度进行控制。首先对液位采用PI控制,使得液位稳定在400 mm,上下波动不超过2 mm。
设置温度对象的PID模块控制周期为10 s,PWM模块刷新周期为10 s,继电反馈参数在线自整定模块中继电输出中心值M = 50%,幅值d =±40%,A_H = 90%,A_L =10%,滞环h =0.05℃,周期判定阈值TU_ ptg =0.3,振幅判定阈值KU_ptg =0.5。
启动继电反馈参数在线自整定。参数整定过程的具体分析:在PID手动输出模式下,设置手动输出值50%,温度稳定在41.5℃,则把41.5℃赋给当前值。令PID输出为0,等温度曲线略微下降时,启动参数在线自整定模块,开始继电振荡和参数自整定。温度振荡曲线近似为正弦曲线。设置滞环宽度为0.05 K,当前值越过设定值且偏差大于0.05 K时,输出才跳变,从而增大了振荡振幅,避免了噪声干扰所引起的切换点抖动。
通过曲线在线辨识,当振荡曲线的相邻振幅偏差百分比小于振幅判定阀值KU_ptg =0.5且相邻振荡周期偏差百分比小于周期判定阀值TU_ptg = 0.3时,判定振荡波形稳定,且最接近于正弦波形,结束继电反馈振荡。辨识出的温度振荡曲线的峰峰值大约为2.574℃,振荡周期大约为100 s。
根据系统辨识出的临界振荡周期和振幅,根据Ziegler-Nichols参数整定公式在线计算出PID控制参数,PID参数自动赋值给PID模块并自动切换到PID控制。此时的P、I、D三个参数为23.74、50、12。
由温度曲线可知超调量较大。由于积分的累积,使得当前值越过设定值,且偏差在逐渐增大的过程中,PID输出才变化,造成控制滞后,最大偏差增大。
对PID算法作如下的改进:设置积分分离带防止积分饱和,引入不完全微分算法延长微分作用输出,采用微分先行抑制设定值阶跃扰动[7],控制周期缩短为5 s,最终实现超调量≤0.50 K、稳态误差≤0.12 K。
5 结束语
本文以继电反馈参数整定算法理论为基础,针对锅炉动态水温度对象编写继电反馈参数在线自整定模块以及改进的PID模块,实现了温度对象参数自整定PID调节。对于单极性PID调节器提出继电输出中心点的概念,对于大惯性温度对象施加大幅值带滞环的继电输出,实现了对象的振荡。通过对振荡曲线的在线辨识实现了参数自整定。对非对称正弦振荡曲线提出了非对称继电输出的方法。由于继电幅值是在实验基础上人工设置的,因此研究自动寻找最佳继电幅值值得进一步研究。
参考文献
[1]边丽华.PID控制器参数自整定方法的研究与实验[D].大连:大连理工大学,2009.
[2]戴连奎,于玲,田学民,等.过程控制工程[M].3版.北京:化学工业出版社,2012:60-61.
[3]杨帆.具有PID自整定功能的温度控制器研究与实现[D].大连:大连理工大学,2006.
[4]黄德先,王京春,金以慧.过程控制系统[M].北京:清华大学出版社,2011:96.
[5]涂植英,陈今润.自动控制原理[M].重庆:重庆大学出版社,2005:282-284.
[6]王树青,戴连奎,祝和云,等.工业过程控制工程[M].北京:化学工业出版社,2002:120.
[7]何克忠,李伟.计算机控制系统[M].北京:清华大学出版社,1998:155-160.
Research on the Relay Feedback Parameter Self-tuning Technology for Temperature Control
殷华文
(南阳理工学院电子与电气工程学院,河南南阳473004)
摘要:通过观测锅炉动态水温度对象在继电反馈下的极限环振荡,对PID参数自整定技术进行了研究。针对对象具有大惯性、大滞后和非线性的特点,在设置继电输出中心点和大幅值继电输出的前提下,采用带滞环的继电反馈振荡方法,研究了对象起振、正弦振荡曲线的在线辨识、非对称正弦振荡曲线处理、PID算法设计和参数整定等具体技术。采用PID + PWM算法进行参数自整定温度控制,实现超调量≤0.50 K、稳态误差≤0.12 K。
关键词:温度对象继电反馈继电输出中心点正弦振荡曲线辨识PID控制参数自整定继电器
Abstract:Through observing the limit cycle oscillation of dynamic boiler water temperature object under relay feedback,the technology of PID parameter self-tuning is researched.In accordance with the characteristics of the objects,e.g.,large inertia,large time lag,and nonlinearity,under the premise of setting relay output central point and large amplitude relay output,by using the method of relay feedback oscillation with hysteresis,specific technologies of object vibration,online identification of sinusoidal oscillation curve,asymmetric sinusoidal oscillation curve processing,PID algorithm design,and parameter self-tuning,etc.,are researched.Using PID + PWM algorithm,parameter self-tuning temperature control is conducted to implement overshoot≤0.50 K and steady error≤0.12 K。
Keywords:Temperature object Relay feedback The central point of relay output Sinusoidal oscillation curve identification PID control Parameter self-tuning Relay
中图分类号:TH7; TP272
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201603006
修改稿收到日期:2015-03-04。
