基于∑-Δ调制原理的高精度旋变旋转变量解码系统
2016-05-11ModulationBasedHighPrecisionRotaryVariableDecodingSystem
∑-Δ Modulation Based High Precision Rotary Variable Decoding System
李 超 杨益群 郝旭耀 赵怀林(上海应用技术学院电气与电子工程学院,上海 200235)
基于∑-Δ调制原理的高精度旋变旋转变量解码系统
Digital sampling filtering
国家自然科学基金资助项目(编号:61104082)。
修改稿收到日期:2015-06-25。
第一作者李超(1990-),男,现为上海应用技术学院机械工程专业在读硕士研究生;主要从事机器人智能控制、无线传感网络等方面的研究。
0 引言
旋转变压器具有精度高、稳定性好、抗冲击抗干扰能力强等特点,被广泛应用于大气数据计算机中风标式迎角和侧滑角测量方案。旋转变压器解调的关键技术在于对其定子感应出的多个模拟电压信号进行高速且高精度同步采样[1-2]。目前,旋转变压器解调方案大多采用闭环分解法——数字转换器(resolver to digital converters,RDCs)或模数转换器(analog to digital converters,ADCs),如文献[1]设计的采用ADI公司的跟踪闭环原理的数字转换器RDC方案。本文采用一种基于Σ-ΔADC过采样结合Sinc3数字抽取滤波器的旋变解调方法。与传统的数字变换器RDC方案相比,该方案具有成本低、精度更高、稳定性更好等优点。
基于过采样原理的Σ-ΔADC具有高精确度、高性噪比、低成本、便于与数字系统集成等优点,在高精度数据采集中具有广泛的应用[2]。本文采用一个二阶的转换芯片ADS1205对旋转变压定子反馈的转子位移信号进行Σ-Δ过采样,将模拟信号转换为一个高速数字比特流信号;然后通过一个数字滤波芯片AMC1210搭建一个具有周期陷波特性的正弦滤波器,对采样的数字比特流信号进行抽取滤波、反向整形和积分运算,从而还原出采样信号中所包含的转子位移信息;最后依靠DSP读取并解算出旋转变压器的转子位移角度。
本文介绍了基于∑-Δ调制原理进行旋变解调的原理方法,并设计了一款基于此原理的大气数据计算机风标式迎角侧滑角旋变系统,介绍其在实际工程中的应用方法。最后经过测试验证了该系统的高精度和高动静态特性,达到了大气数据计算机系统对旋转变量迎角的测量要求。
1 系统概述
1.1旋转变压器原理
旋转变压器是一种常用的转角测量元件,其基本原理为通过给转子上一个激励信号,然后由空间相位差90°的定子绕组通过电磁感应输出带有转子位置信息的电压信号[3]。旋转变压器原理如图1所示。

图1 旋转变压器原理图Fig.1 Schematic diagram of rotary transformer
其中,转子绕组的激励信号为:

两个定子绕组输出调幅信号为:

式中: E0为励磁电压幅值;θ为旋转变压器轴角;ω为励磁电压角频率; Ur为励磁绕组激励信号电压; Us为定子输出调幅信号正弦电压; Uc为定子输出调幅信号余弦电压。
1.2方案概述
风标式迎角传感器一般装在飞机侧面,是用来测量飞机迎角大小的一种传感器。其结构原理为:通过一个翼型叶片(风标)与系统旋转变量传感器机械相连,气流的变化会带动飞机风标变化,从而通过系统解调旋转变量便可知道气流相对飞机的方向,即飞机的迎角大小。但由于飞机飞行的环境较为复杂,而且对迎角的测量精度较高,这就需要旋转变量的解调模块具有较强抗干扰能力和较高的精度[4]。
迎角测量方案的功能框图如图2所示。
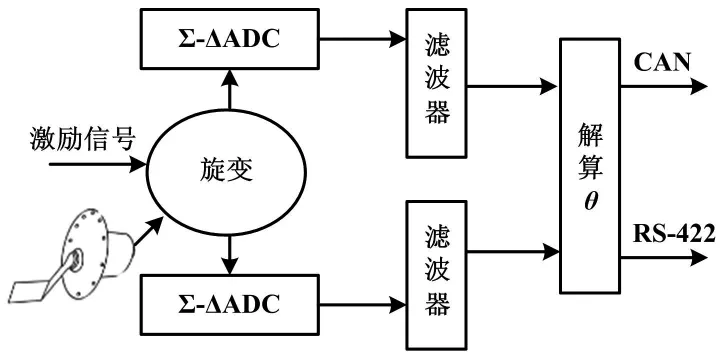
图2 迎角测量方案框图Fig.2 Block diagram of angle of attack measurement
迎角风标与旋转变压器转子同轴连接,将迎角信息传递给旋转变压器,通过在旋转变压器转子侧产生一个正弦波的激励信号,由电磁感应原理旋转变压器的两个定子侧,分别感应出带有转子位移信息的两个正余弦载波信号。这两个载波的模拟信号直接反馈给一个Σ-ΔADC调制器,将模拟信号转换为数字比特流信号。此时的数字比特流信号带有载波信息和高频噪声,必须经过滤波器进行抽取滤波、降相和积分处理才能还原出转子位置的正余弦信号,然后通过一个反正切计算便可解算出转子角度信息,最后通过CAN总线和RS-422总线输出。
需要注意的是,通过Σ-Δ调制解调方法并不是测量反馈信号的瞬时值,而是一定时间窗内加权采样点的集合。因此,相对于传统的峰值采样法,本文提供的改进型迎角测量方案可以更大程度上减少电磁干扰带来的瞬时误差,提高系统的精度。
2 旋变解调方法优化
Σ-Δ也称增量调制型转换技术,其基本方法是以很低的采样分辨率(1位)和很高的采样速率将模拟信号数字化,使用过采样、噪声整形和数字滤波等方法增加有效分辨率,对ADC输出进行采样抽取处理,以降低有效采样速率。∑-Δ调制旋变解调的实现如图3所示。
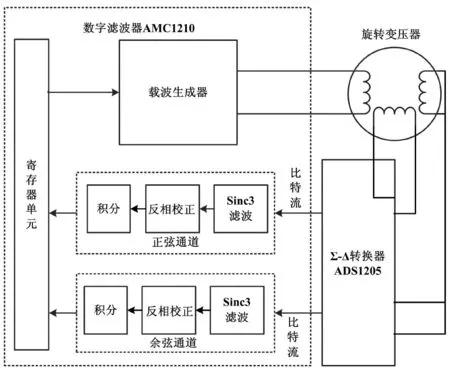
图3 ∑-Δ调制旋变解调实现框图Fig.3 Implementation block diagram of∑-Δ modulation rotary variable demodulation
如图3所示,系统采用一个数字滤波器AMC1210结合ADS1205,完成对旋变解码Σ-Δ的采样滤波功能。其中ADS1205是一个二阶双通道的Σ-Δ转换器,其功能是将采样得到的模拟信号转换成一个数字的比特流信号。旋转变压器输入输出曲线如图4所示。
根据前文所述,系统要完成对旋转变压器的解码,首先要给旋转变压器转子一个4~20 kHz的正弦波载波信号,其波形如图4(a)所示。旋转变压器获取这个载波信号之后,通过电磁感应在两个定子上产生两个带有转子位移正余弦信息的调幅信号,其波形如图4(b)所示。这两个变压器的输出可以直接反馈给ADS1205,ADS1205通过Σ-Δ过采样将模拟量转换为一个与输入速度成比例的数字比特流。

图4 旋转变压器输入输出信号曲线Fig.4 The input and output signals of rotary transformer
由于ADS1205采用的Σ-Δ过采样会带有高频噪声和载波信息,所以此时的正余弦数字信号必须通过AMC1210进行抽取滤波处理。抽取滤波器由Sinc滤波器组成,一个N阶的Sinc滤波器传递函数为:

转换得到其频率响应函数为:

式中:ω=2πf/fs; fs为信号采样频率; M为载波的陷波频率,即抽取率。
由于本文采用的是二阶Σ-Δ调制器,而Sinc滤波器阶数必须大于前端Σ-Δ调制器阶数,在此选择三阶Sinc滤波器。Sinc3是带有陷波特性的低通滤波器,通过设定抽取率M,将载波频率设定在Sinc3滤波器的陷波频率域之中,以起到对载波信号的抑制作用。Sinc3滤波器的陷波特性如图5所示。

图5 Sinc3滤波器的幅频特性图Fig.5 Magnitude-frequency characteristic of Sinc3 filter
当定子反馈信号经过AMC1210的Sinc3滤波器完成滤除高频噪声和抑制载波信号之后,便得到一个较为精准的位移信号波形,如图6 (a)所示。由于经过滤波后的数字信号为互补波形,不便于直接对其进行数字积分处理,必须经过降相处理之后,得到如图6 (b)的波形。对图6 (b)的波形积分,还原出所需的正余弦位移数字信息波形,如图6(c)所示。

图6 系统波形图Fig.6 System waveform
在比特流被AMC1210完成滤波、降相和积分之后,从旋转变压器定子反馈出的正余弦信号已经被过滤掉了载波信号以及高频噪声,并完成了模拟信号到数字化的转换。此时AMC1210相应的输出通过并行数据总线或SPI串行总线方式被微处理器读取。
3 系统硬件设计
根据系统迎角测量方案所述,当系统对旋转变压器定子反馈信号完成Σ-ΔADC转换之后,还需要通过一个微控制器读取其输出信号进行反正切角度解算,并通过工业总线将数据传输出。本文采用TMS320F2808,通过SPI串行总线方式与AMC1210通信来获取Σ-ΔADC转换的输出值,并进行响应的角度结算,最后通过RS-422和CAN总线将数据发出。系统接口电路示意图如图7所示。
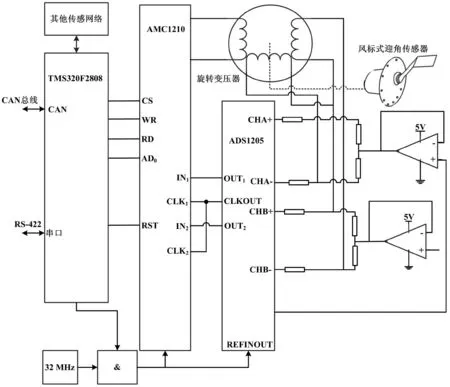
图7 系统接口电路示意图Fig.7 Schematic diagram of system interface circuit
如图7所示,AMC1210通过两个互补输出引脚将两路正弦载波信号加载到旋转变压器转子端。旋转变压器定子侧反馈信号直接与ADS1205的采样通道引脚相连。由于旋转变压器定子反馈信号为差压信号,为了便于ADS1205进行采样,必须在其输入范围的中间增加一个模拟参考电压,将采样信号平移,然后通过一个5 kΩ的电阻对模拟信号进行去耦合。模拟信号的参考电压由一个精密仪表放大器OPA2340组成电压跟随器而生成,如图8所示。
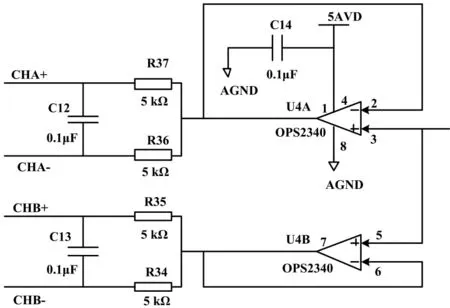
图8 ADS1205采样电压偏移电路图Fig.8 ADS1205 sampling voltage offset circuit
为保证Σ-ΔADC采样和数字滤波器时钟的同步,ADS1210与AMC1210共用一个32 MHz的时钟晶振,且通过与TMS320F2808的一个I/O口相连经过与门进行控制。当AMC1210寄存器载入载波信号和Sinc3滤波器参数配置之后,TMS320F2808便通过此I/O口打开ADS1205和AMC1210的晶振输出,此时AMC1210在变压器转子侧会产生载波激励信号[5-7]。
系统采用CAN总线和RS-422总线双余度通信方式,当TMS320F2808解调出旋变的转子位移后,通过CAN总线和RS-422总线同时将解调信息输出至飞控计算机和一些机载仪表设备。
4 系统程序设计
按照上文所述Σ-Δ模数转换原理,旋转变压器的解码包括以下几个过程。
(1)AMC1210载波信号产生;
(2)ADS1205进行Σ-ΔADC采样;
(3)AMC1210进行Sinc3滤波;
(4)AMC1210校相和积分;
(5)AMC1210生成正余弦数字信号;
(6)DSP读取正余弦数字信号并反正切计算角度;
(7)DSP通过CAN总线和RS-422总线输出。
根据旋变解码的过程,程序设计时首先要将其对应引脚设置为SPI通信8位模式,按照AMC1210通信时序,在SPI时钟引脚上升沿对数据读取,下降沿输出数据,其中第一位表示读或写。每次进行读写最少要有24位的数据传输,其中高8位代表地址,低16位代表读写数据。
依据上文所述,AMC1210必须首先产生4~20 kHz的一个正弦波的载波信号。AMC1210中有一个1 024位的数字寄存器用来装载载波信号的数据,通过Matlab计算一个积分三角调变器生成128个8位的数据即1 024位,产生载波信号数据。
当转子载波信号的数据依次装载至AMC1210寄存器中,打开PWM波输出功能后,为保证PWM1和PWM2引脚相位互补和正余弦采样信号同步,将AMC1210中有一个相角同步寄存器置位为1。当相位同步之后,其同步寄存器标志位自动清0。
AMC1210在完成一次Σ-Δ解码过程后会在其中断寄存器中设置其对应的中断标志位,TMS320F2808在对AMC1210配置完成之后,通过读取此中断寄存器来判断哪个通道Σ-Δ调制完成。当有通道Σ-Δ调制解调完成时,TMS320F2808通过访问AMC1210对应的通道数据寄存器,得到转子角度的正弦数据或余弦数据;再经过反正切函数解算出角度值。为了将解算数据转换为0°~360°角度值,实际程序中使用C语言实现atan2(a,b)函数,即:

式中:β为转子角度; sin(x)为正弦信号A/D采样值; cos(x)为余弦信号A/D采样值。
具体程序流程如图9所示。
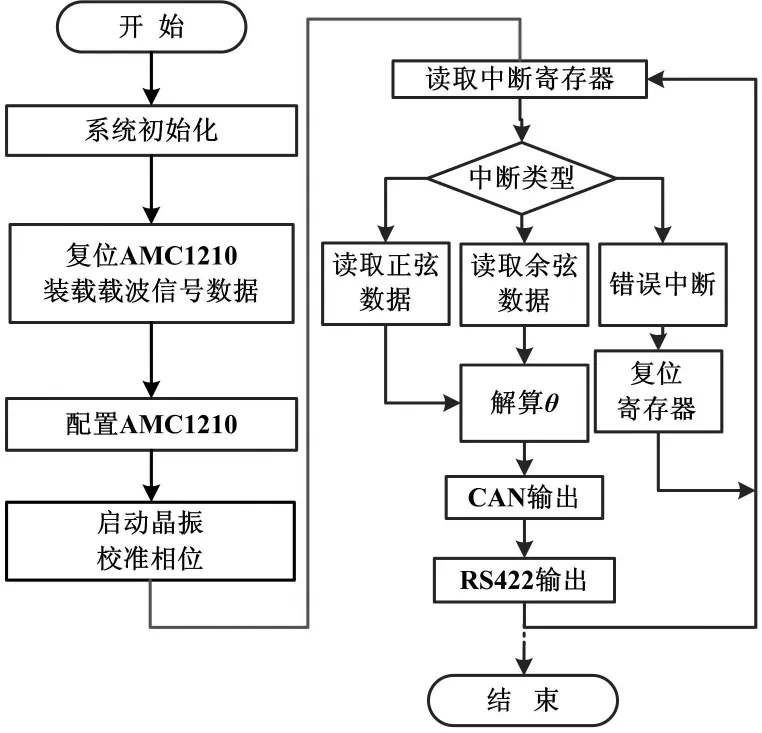
图9 旋变解调程序流程图Fig.9 Flowchart of the rotary variable demodulation program
5 实验测试
为了验证基于Σ-Δ调制原理的旋变解调系统的静态特性及精确度,将本文设计的基于Σ-Δ旋变解调系统与文献[1]所采用的旋变解码系统进行对比,两设备在同一无刷电机实验平台上与旋转变压器转子同轴安装。实验采用RS-422通信转USB电平将旋变模块解算角度发送至上位机,对解算角度进行观测。根据上位机显示,对两个旋变解调系统数据结果进行误差均值和方差分析,其结果如表1所示。
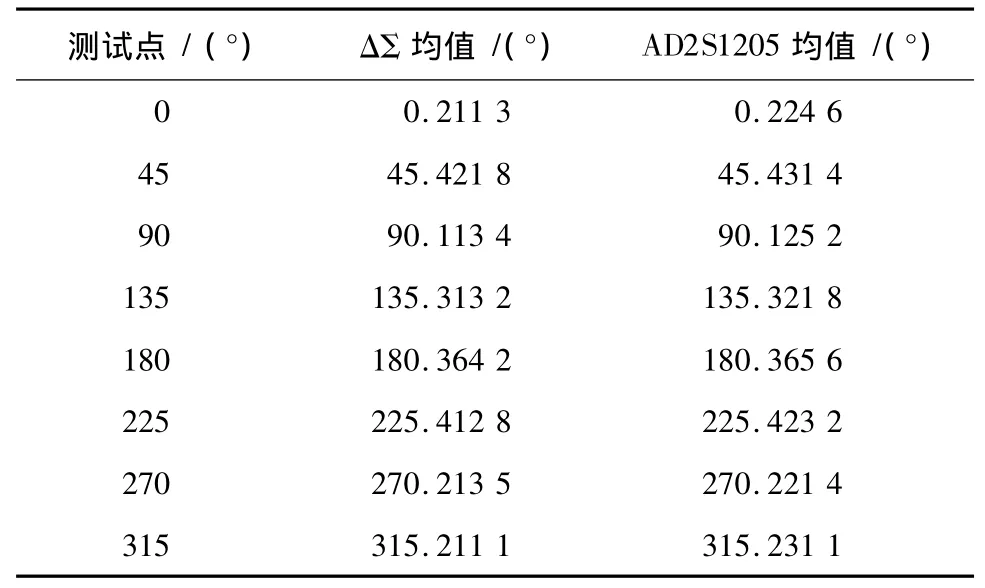
表1 实验测试均值结果Tab.1 Mean value results of the experimental test
根据表1的实验数据结果数据可以看到,采用Σ-Δ调制原理的角度误差明显小于AD2S1205解调方案的角度误差。为了比较两个系统的静态稳定性,对两组数据进行方差分析。
方差分析如表2所示,实验数据结果表明,采用Σ-Δ调制原理的旋变解码的方差比采用专用芯片AD2S1205解码方差小,其静态稳定性优于专用芯片AD2S1205旋变解码方案。
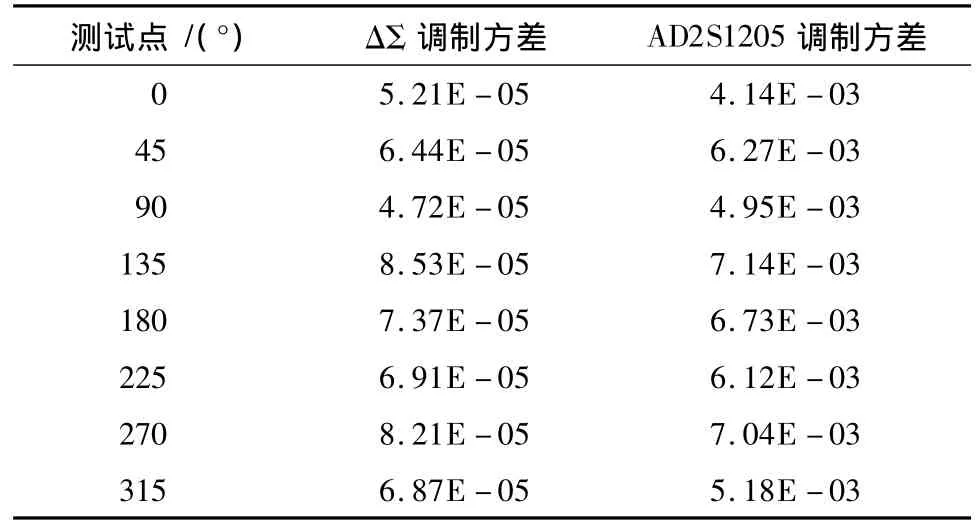
表2 方差分析Tab.2 Variance analysis
图10为当电机角度为30°左右时,采用Σ-Δ调制方案进行定子反馈测试的正弦信号波形,其中图10(a)是振幅为10 V、频率为5 kHz、AMC1210产生的定子反馈信号;图10(b)是振幅为3 V、频率为5 kHz且含有明显高频噪声的转子波形。
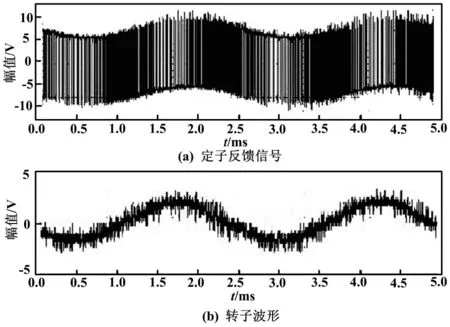
图10 测试波形Fig.10 Test waveforms
6 结束语
本文提出了基于Σ-Δ调制的旋变解调方案,采用Σ-Δ过采样技术,能够对模拟信号高频率精确采样并将系统大部分的采样处理过程转移到数字域;通过Sinc3滤波器陷波特性,滤除高频噪声和抑制载波信号;通过反向整形和积分的方法,还原载波位移信号;通过CAN总线和RS-422总线双余度通信方式,增强系统通信的容错能力及稳定性。实验结果表明,该系统具有精度高、灵敏性好、稳定性高的特性,完全满足大气数据计算机迎角测量的性能要求。
参考文献
[1]敖杰,刘永强.旋转变压器数字转换器AD2S1205在电机转子位置检测中的应用[J].仪器仪表与传感器,2013(5):25-28.
[2]周长攀,杨贵杰,苏健勇,等.基于ΣΔ调制原理的全数字轴角变换算法[J].电机与控制学报,2013,17(8):78-84.
[3]何文静,胥效文,史忠科.基于基于AD7655的旋转变压器-数字转换器的软件实现[J].测控技术2013,32(4):134-140.
[4]樊泽明,郭月,袁朝晖.基于AD698的旋转变压器驱动及解码电路设计[J].测控技术,2013,32(2):110-117.
[5]刘和平.数字信号控制器原理及应用-基于TMS320F2808[M].北京:北京航空航天大学出版社,2011.
[6]吴成加,赵圣宝.旋变解码芯片AD2S1205应用系统设计[J].电子技术与软件工程,2014,20(1):258-261.
[7]赵瑞杰,陶学军,刘德林,等.基于角度观测器的旋转变压器解码算法研究[J].电力电子技术,2012,46(7):1-3.
∑-Δ Modulation Based High Precision Rotary Variable Decoding System
李超杨益群郝旭耀赵怀林
(上海应用技术学院电气与电子工程学院,上海200235)
摘要:为了满足无人机中风标式迎角侧滑角传感器对旋转变量测量精度高、稳定性好、反应速度快的要求,提出了一种基于∑-Δ调制技术的旋转变压器解调方案。分析了∑-Δ调制技术用于旋变解调的实现原理,以DSP为主控制器,介绍了采用∑-Δ模拟数字转换过采样结合Sinc3数字抽取滤波的旋变解码系统应用方法。实验证明,所设计的旋变解码系统具有较好的静态特性和动态稳定性,并达到了大气数据计算机中风标式迎角和侧滑角测量的性能要求。
关键词:无人机旋转变压器旋变解调调制技术DSP控制器数字抽样滤波
Abstract:To achieve the characteristics of high precision,good stability and fast responding with the attacking angle and side slipping angle vane sensor measuring the rotary variables in the unmanned aerial vehicle,a rotary transformer demodulation scheme based on the∑-Δ modulation technology is designed.The paper analyzes the technical principle of applying the∑-Δ modulation technology to the rotary variable demodulation.It introduces the designed rotary variable decoding system with the master controller DSP,which combines over sampling by∑-Δ analog-digital conversion and Sinc3 digital extraction filtering.The experiments show that the rotary variable decoding system has both better static characteristics and better dynamic stability and the performance requirements for the measurement of both the attacking angle and the side slipping angle in the air data computer are satisfied.
Keywords:Unmanned aerial vehicles (UAV)Rotary transformer Rotary demodudiation Modulation technology DSP controller
中图分类号:TH3; TP27
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201603005
