激光干涉仪无线测控的设计和实现
2016-05-10任少华卢庆杰
任少华,卢庆杰,韩 森
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.苏州慧利仪器有限责任公司,江苏 苏州 215123)
激光干涉仪无线测控的设计和实现
任少华1,2,卢庆杰1,2,韩森1,2
(1.上海理工大学 光电信息与计算机工程学院,上海200093;2.苏州慧利仪器有限责任公司,江苏 苏州215123)
摘要针对传统激光干涉仪需要手动调节光学部件问题,设计并开发了一种激光干涉仪无线测控系统,该系统可以无线调节激光干涉仪光学部件的位置。系统采用nRF2401无线射频技术,与传统的nRF2401运用相比,该系统采用奇偶校验和CRC校验的双重校验,提高无线射频传输数据的正确率。同时系统采用闭环控制,提高了激光干涉仪的精确度和稳定性,避免了光学部件的过量调节对激光干涉仪的损伤。
关键词激光干涉仪;移相干涉;无线控制
基于传统激光干涉仪采用移相干涉原理,广泛运用在精密仪器的精度标定,其中的一些光学部件通常需要手动调整。然而,随着仪器精密度要求的不断提高,手动调整光学器件带来的误差和不稳定性成为了影响激光干涉仪精度的一个重要因素,同时有些光学部件在激光干涉仪机械结构内部,调节较为不易。针对这种情况,本文提出了一种新的方案,通过无线射频测控系统来达到调节光学器件位置的目的。激光干涉仪的光学器件位置调节系统由无线测控系统,伺服电机驱动系统和电动操控机构3部分组成。该方案可有效减少人为调节所带入的不稳定性,同时由高精密电机配合机械机构替代人手调节光学部件,能有效提高调节精度并简化调节难度,最终达到提高激光干涉仪精度和稳定度的要求。
1原理和方法
激光干涉仪是一种高精度的测量仪器,本设计基于菲索型激光干涉仪。菲索型激光干涉仪的原理如图1所示,激光器产生的单频激光通过不同的光程在CCD上产生干涉。为提高干涉仪的精确度和稳定性,很多激光干涉仪采用移相干涉的方法。移相干涉法是一种通过多幅干涉图的平均处理降低随机噪声,提高干涉条纹稳定性的方法,而移相干涉法往往需要调节参考面和被测面来校准相位[1]。传统的激光干涉仪通常采用人工手动调节螺丝来调节被测面和参考面的位置,手动调节不仅调节时间长,操作不方便,还会带入不稳定性影响干涉仪的精度,甚至不当的操作会影响干涉仪的正常使用。
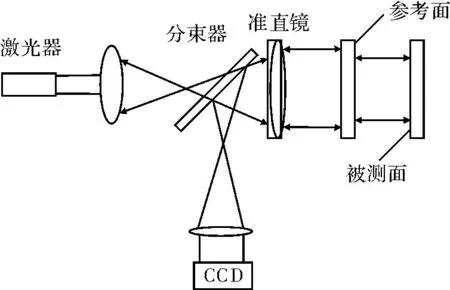
图1 菲索干涉仪示意图
2无线测控系统设计
2.1nRF2401无线射频模块
系统比较了WiFi[2],蓝牙[3]和无线射频3种无线通信方案,综合考虑了可行性、研发周期和研发成本,决定使用无线射频方案来完成无线通信。无线测控系统中的无线射频设计采用nRF2401无线模块,内置频率合成器、功率放大器、晶体振荡器和调制器等功能模块,工作在2.4~2.5 GHz ISM频段,芯片具有较低的功耗。nRF2401应用DuoCeiverTM技术,可使用同一天线同时接受两个不同频道的数据[4]。nRF2401内置地址解码器,每个nRF2401拥有一个地址,在编程时可设置不同的地址,使得nRF2401按需要进行一对一或者一对多通信。在进行多对一的通信时,nRF2401有ShockBurstTm收发和直接收发两种模式[4],模式的选择由nRF2401芯片内部的寄存器决定,可通过读写寄存器来决定选择哪种收发模式。nRF2401自动封装发送数据,数据采用CRC检验[5]。
2.2电动操控系统
电动操控系统由伺服电机[6]、变速控制结构和光学器件位置传感器组成。激光干涉仪无线测控系统通过电动操控机构对激光干涉仪光学器件位置进行调整,如图2所示。同时,传感器会对所调节大光学部件的位置进行一个反馈。当光学部件的位置超过预设位置范围时,给无线测控发送一个中断信号[7],避免光学部件被电动操作机构带出正常范围而对激光干涉仪造成一定的损伤。无线测控系统,伺服电机驱动系统,电动操控机构和光学器件位置传感器形成了一个闭环的测控环境,提高了系统的安全性和稳定性。

图2 电动操控机构工作流程
2.3硬件系统设计
无线测控系统设计由无线测控发射模块和无线测控接受模块两个部分组成,无线发射模块如图3所示,由按键板、处理器、nRF2401无线射频模块和天线组成。当激光干涉仪的某个光学部件需要调整位置时,可选择对应按键板上的按键对处理器发送请求,由于干涉仪所需要调整光学器件的位置较多,处理器先对相应的请求进行编码,然后通过无线射频模块发射信号。

图3 无线测控发射模块
接收模块如图4所示,包括天线、无线射频、处理器、传感器和电机驱动电路。当nRF2401无线测控接收模块接收到来自于无线测控发送模块发送的信息时,会将信息传送到处理器对信息进行解码,然后根据解码后的信息对高精度直流电机进行相应的操作。

图4 激光干涉仪无线测控接收模块
2.4软件系统设计
无线测控软件系统包括发送模块和接收模块两部分。发送模块的作用是实现人机的交互功能。为避免不同发射模块和接受模块互相干扰,设计方案采用发射模块和接受模块固定通信,即发射模块只能与固定的相应接受模块进行通信。在此系统中,nRF2401无线射频模块采用了ShockBrustTM模式。软件系统流程如图5和图6所示。发射模块和接受模块,均处于不断的循环中,同时判断发射模块循环的检测键盘是否按下,而接受模块则始终不断地检测是否接收到射频信号[8]。

图5 发射模块流程

图6 接受模块流程
为提高实时通信的速度和通信成功率,按键信息采用8位2进制编码的方式,如表1所示,其中第3位为电机选择位,最多可提供8个电机的选择,第4位为电机方向选择位,方向位数值为1,电机正方向旋转,数值为0则电机反方向旋转。第5和第6位为电机的速度选择位,最多可以提供4档不同速率的选择,以方便对光学仪器的位置实行粗调和精调,如表2所示,速度位的2进制数值对应电机的速度。

表1 按键信息编码
第7位为电机校验位,第8位为低6位校验位,校验位采用奇偶校验,当校验信息中1的个数为奇数时则此位为1,校验信息中1的个数为偶数时则此位为0。虽然加入了校验会降低系统的实时通信速度,但可较大地提高系统数据传送的成功率。值得注意的是,当接收模块接收到信息并解码后,首先需通过传感器确定光学器件的位置,若位置超出了预设值范围,为保护激光干涉仪安全的使用,系统对将不操作此次发射的信号,且返回一个超出预设范围的警告。只有光学器件在预设范围内,系统才会操作相应的电机。
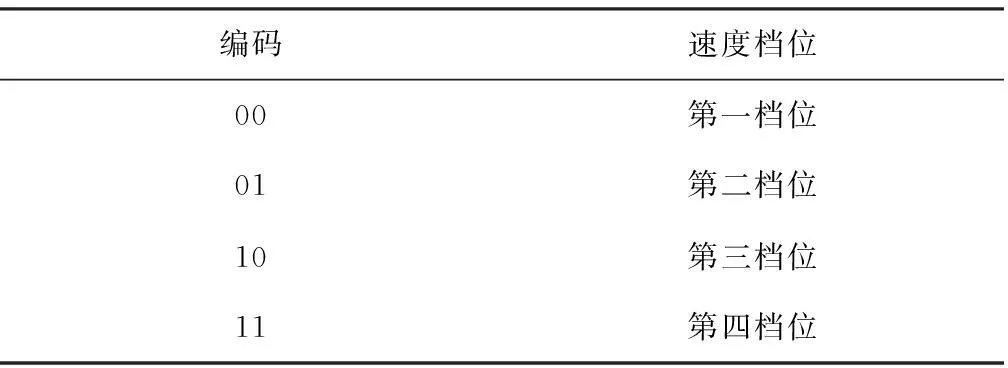
表2 速度位编码和档位对应表
3系统测试
在软硬件调试成功后,分别对是否使用双重检验进行了系统传输的正确性测试,在1 m,5 m,10 m的距离发送1 000个数据包,对接收端的数据进行对比,对比结果如表3所示,使用双重校验数据传输正确率有一定的提升。由于系统采用奇偶校验和CRC校验,虽降低了一些实时传输的速度,但大幅提高了系统的稳定性。应当指出的是,使用双重校验时系统的实时传输速度为120 kbit·s-1,完全能满足激光干涉仪控制光学器件位置的要求。

表3 系统传输正确性测试
4结束语
通过系统测试可知,系统的传输速率满足激光干涉仪无线测控的要求,同时系统采用奇偶校验和CRC校验的双重校验,大幅降低了无线通信过程中的误码率。系统采用的闭环模式也能避免过量调整对激光干涉仪造成损伤。系统测试表明,采用2.4 GHz的无线射频技术,通过非接触式的无线遥控完成激光干涉仪光学部件的位置调整是可行的。
考虑到该系统的实际应用,系统对干涉仪的精度和稳定性的影响有待进一步的深入研究。同时在未来的发展方向中,会考虑将激光干涉仪的控制和CCD采集的数据通过此系统传输到网络,实现测量和信息处理相分离,达到激光干涉仪在静室内操作的要求,这种功能在高精密工业中会有一定的需求。
参考文献
[1]朱日宏,陈磊,王青,等.移相干涉测量术及其应用[J].应用光学,2006,27(2):85-88.
[2]李扬.WiFi技术原理及应用研究[J].科技信息,2010(6):241-242.
[3]徐金苟.蓝牙4.0底层核心技术协议研究与实现[D].上海:上海交通大学,2012.
[4]张崇,于晓琳,刘建平.单片2.4GHz无线收发一体芯片nRF2401及其应用[J].国外电子元器件,2004(6):34-36.
[5]陈丽娟,常丹华.基于 nRF2401 芯片的无线数据通信[J].电子器件,2006,29(1):248-250.
[6]余翔翔,陈德传,郑忠杰.无线电遥控式直流电机控制系统[J].杭州电子科技大学学报,2013,33(5):191-194.
[7]郭天祥.新概念51单片机C语言教程[M].北京:电子工业出版社,2009.
[8]张坤.基于FPGA的PicoBlaze嵌入式通信系统设计[J].电子科技,2013,26(5):53-56.
Design and Implementation of Wireless Monitoring and Control Based on Laser Interferometer
REN Shaohua1,2,LU Qingjie1,2,HAN Sen1,2
(1.School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China;2.Suzhou Huili Instrument Co.,Ltd.,Suzhou 215123,China)
AbstractA wireless automatic control system designed and implemented according to save the need to manually adjust the optical components in traditional laser interferometers.The system can regulate the location of the laser interferometer optical components by wireless technology.The nRF2401 wireless radio frequency technology is used and the transmitted information is coded with odd-even check and CRC check,thus an obvious decreased error rate compared with that by the traditional nRF2401.Because of the use of the closed loop,the laser interferometer has an enormous improvement in precision and stability,avoiding the optical components of excessive regulation of laser interferometer.
Keywordslaser interferometer;phase-shifting interferometry;wireless control
中图分类号TN249;TH744
文献标识码A
文章编号1007-7820(2016)04-009-04
doi:10.16180/j.cnki.issn1007-7820.2016.04.003
作者简介:任少华(1988—),男,硕士研究生。研究方向:激光干涉仪的无线测控。
基金项目:国家重大科学仪器设备专项基金资助项目(2013YQ15082902)
收稿日期:2015- 08- 21